Umsetzung und Vergleich moderner SLAM-Verfahren mit MATLAB
Autoren: Melzer, K.
Betreuer: Prof. Schneider
Art: bachelorarbeit
Projektlaufzeit: TBD
Motivation
Mobile Roboter, wie beispielsweise Saugroboter, müssen ihr Umfeld kartografieren und sich gleichzeitig in dieser Karte lokalisieren, um systematisch zu reinigen. Dieses Verfahren nennt sich in der Robotik SLAM (englisch Simultaneous Localization and Mapping; deutsch Simultane Positionsbestimmung und Kartenerstellung).
Ziel
Moderne SLAM-Verfahren werden recherchiert, um den Stand der Technik arzustellen. Diese Verfahren werden anhand technischer Kriterien verglichen und bewertet. Die TOP 3 Verfahren werden in der Simulationssoftware MATLAB umgesetzt um die Bewertung simulativ zu validieren.
Aufgabenstellung
- Recherche; Einarbeitung in das Thema anhand von Fachliteratur
- Entwicklung von Kriterien zur Bewertung von SLAM-Verfahren
- Vergleich der Anhand SLAM-Verfahren mithilfe eines morphologischen Kastens
- Bewertung der SLAM-Verfahren
- Simulation der TOP 3 Verfahren in MATLAB
- Vergleich der Simulationsergebnisse
- Schlussfolgerung der Resultate
- Zusammenfassung der Ergebnisse und Ausblick
Erwartungen an die Projektlösung
- Arbeit wird im HSHL Wiki eingetragen und gepflegt
- Arbeit nach wissenschaftlichem Standard
- Erstellung eines ausführlichen Versuchsplan zur Prüfbarkeit
- Wöchentliche Fortschrittberichte
Video
Getting Started
- Grundlagend der Wahrscheinlichkeitsrechnung
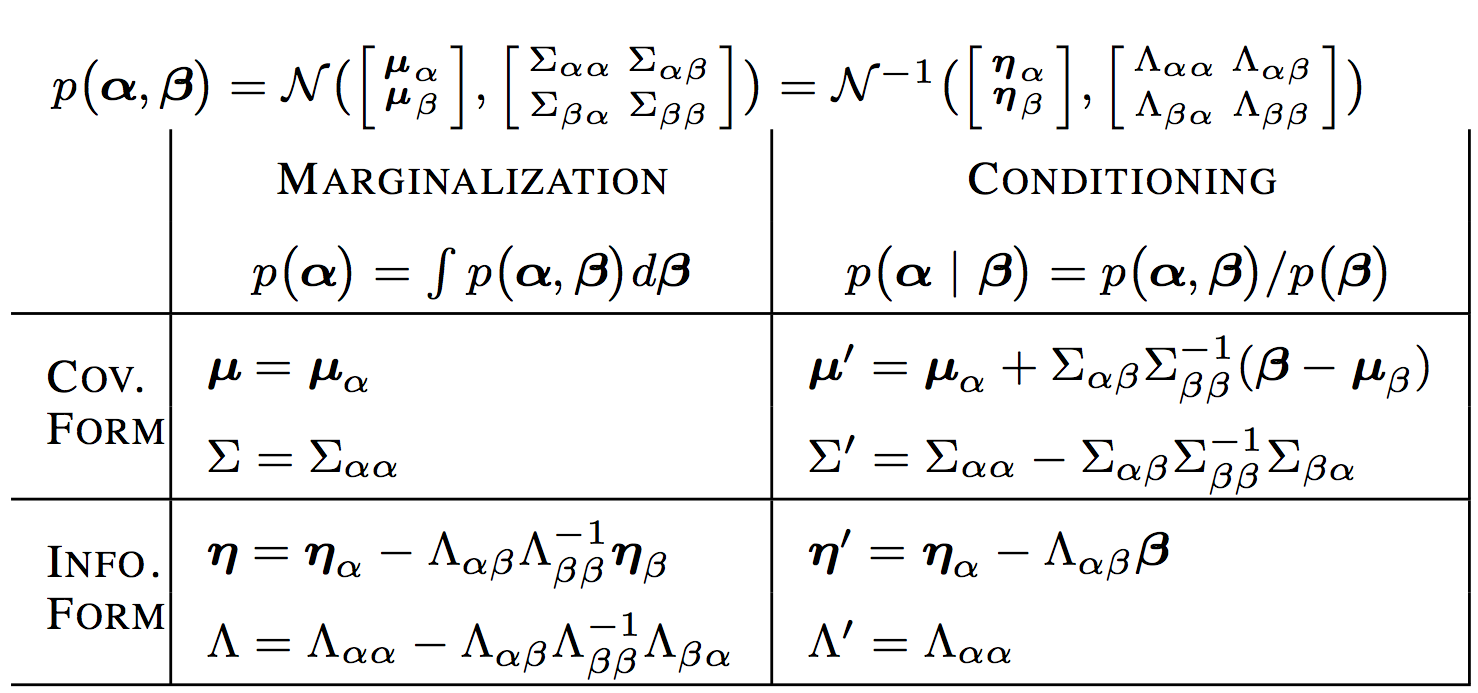
- Marginalization and Conditioning of Gaussians (taken from Eustice et al, IROS 05)
- K. Murphy: Gaußverteilung in MATLAB
- Petersen and Pedersen: The Matrix Cookbook
{kind=link}
Weblinks
Literatur
- Thrun, Burgard, Fox: Probabilistic Robotics, MIT Press, 2005, website
- Springer Handbook on Robotics, Chapter on Simultaneous Localization and Mapping (Chapt. 37 in 1st edition)
- Schoen and Lindsten: Manipulating the Multivariate Gaussian Density, 2011, pdf
- Gian Diego Tipaldi: Notes on Univariate Gaussian Distributions and One-Dimensional Kalman Filters, 2015, pdf
- Welch and Bishop: Kalman Filter Tutorial, 2011, pdf
- Julier and Uhlmann: A New Extension of the Kalman Filter to Nonlinear Systems, 1995, pdf
- Thrun, Liu, Koller, Ng, Ghahramani, Durrant-Whyte: Simultaneous Localization and Mapping With Sparse Extended Information Filters, 2004. pdf
- Eustice, Walter, Leonard: Sparse Extended Information Filters: Insights into Sparsification, IROS, 2005. pdf
- Montemerlo, Thrun, Kollar, Wegbreit: FastSLAM: A Factored Solution to the Simultaneous Localization and Mapping Problem, 2002, pdf
- Montemerlo, Thrun: Simultaneous Localization and Mapping with Unknown Data Association Using FastSLAM, 2003, pdf
- Grisetti, Stachniss, Burgard: Improved Techniques for Grid Mapping with Rao-Blackwellized Particle Filters, 2007, pdf
- Stachniss, Grisetti, Burgard, Roy: Analyzing Gaussian Proposal Distributions for Mapping with Rao-Blackwellized Particle Filters, 2007, pdf
- Madsen, Nielsen, Tingleff: Methods for Non-Linear Least Squares Problems, 2004, pdf
- Grisetti, Kuemmerle, Stachniss, Burgard: A Tutorial on Graph-Based SLAM, 2010, pdf
- Grisetti, Kuemmerle, Stachniss, Frese, Hertzberg: Hierarchical Optimization on Manifolds for Online 2D and 3D Mapping, 2010, pdf
- Olson, Agarwal: Inference on Networks of Mixtures for Robust Robot Mapping, 2013, pdf
- Agarwal, Tipaldi, Spinello, Stachniss, Burgard: Robust Map Optimization Using Dynamic Covariance Scaling, 2013, pdf
- Olson, Leonard, Teller: Fast Iterative Optimization of Pose Graphs with Poor Initial Estimates, 2006, pdf
- Grisetti, Stachniss, Burgard: Non-linear Constraint Network Optimization for Efficient Map Learning, 2009, pdf
- Olson: Recognizing Places using Spectrally Clustered Local Matches, 2009, pdf
- Tipaldi, Arras: FLIRT -- Interest Regions for 2D Range Data, 2010, pdf
Siehe auch
BSD-Lizenzbedingung BSD-Lizenz
Copyright (c) 2018, Hochschule Hamm-Lippstadt, Dep. Lip. 1, Prof. Schneider
Hochschule Hamm-Lippstadt. Alle Rechte vorbehalten.
→ zurück zur Übersicht: Studentische Arbeiten