Stopplinien-Verhalten
Bearbeiter: Christian Tchenko
Aufgabe
Bearbeiten Sie nachfolgende Aufgaben bis zum Abgabetermin und stellen Sie Ihre Lösung Prof. Schneider vor. Gehen Sie systematisch in den in SDE vermittelten Schritten
- Einleitung
- Anforderungen
- Funktionaler Systementwurf / Technischer Systementwurf
- Komponentenspezifikation
- Programmierung
- Komponententest
- Zusammenfassung
- Link zum Quelltext in SVN
vor.
Einleitung
In dieser Aufgabestellung ist die Zielsetzung, das Verhalten des Fahrzeugs an Stopplinien entsprechend den Anforderungen im Lastenheft zu implementieren. Das Fahrzeug muss nach dem Lastenheft im Falle der Erkennung einer Haltelinie immer langsamer fahren. Befindet sich es an der Stopplinie, dann muss es zwei Sekunden halten und dann weiterfahren
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung so muss es anhalten | Christian Tchenko | 25.10.2019 | Prof. Schneider | |
| 2 | Das Fahrzeug muss vor einer 40mm breiten Stopp-Linie mindestens 2 Sekunden anhalten | Christian Tchenko | 18.10.2019 | Prof. Schneider | |
| 3 | Ist eine Stopplinie erkannt worden, dann muss das Fahrzeug immer langsammer fahren. | Yanick Christian Tchenko | 25.10.2019 | Prof. Schneider | |
| 4 | Das Fahrzeug darf nicht weiter als 15 cm von der Stopplinie entfernt sein | Yanick Christian Tchenko | 25.10.2019 | Prof. Schneider |
Programmierung
Die gesamte Programmierung erfolgt hierbei in Matlab.
Komponententest
Hier handelt es sich um die Entwicklung von einzelnen Komponenten. Der Komponententest schließt die Entwicklung mit dem Testbericht ab.
| ID | Testfallbeschreibung | Eingang | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|---|
| 1 | Das Fahrzeug steht vor der Stopplinie. | Prof. Schneider | 18.10.2019 | ||||
| 2 | Das Fahrzeug fährt immer langsammer bei Stopplinienerkennung. | Prof. Schneider | 18.10.2019 |
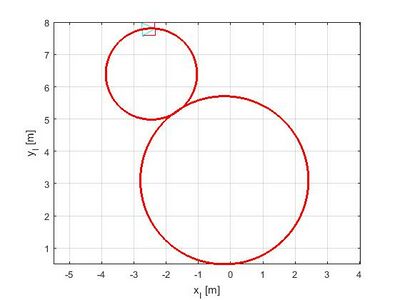
Als Abschluss zeigt die letzte Abbildung dieses Artikels eine Ergebnisdarstellung der Fahrzeugbewegung in I-Koordinaten (Draufsicht).
Funktionaler Systementwurf / Technischer Systementwurf
Im Rahmen der bisherigen Aufgaben wird das Verhalten hauptsächlich aufs Geradefahrszenario berücksichtigt.
Konzept
Als Aufgabenstellung ein Simulinkblock für das Verhalten an Stopplinien gemäß Lastenheft zu entwickeln. Dieser Block muss in Simulation und im realen Fahrzeug lauffähig sein.
Eingänge:
SenKam_StoplinieFlag_bitSenKam_StoplinieAbst_f64
Ausgang:
BSFVx_Faktor_i8
Der Faktor wird mit der Sollgeschwindigkeit BsfVx_VxSoll_f64 multipliziert.
- Das Bit
SenKam_StoplinieFlag_bitaktiviert den Simulink Block. - Vor der Stopplinie wird
BSFVx_Faktor_i8abhängig vonSenKam_StoplinieAbst_f64linear von1auf0runtergeramt. - Standphase entsprechend des Lastenheftes.
- Überprüfung ob die Straße frei ist.
- Bei freier Straße
BSFVx_Faktor_i8=1setzen.
Vorstellung
Für die Vorstellung des Ergebnisse wurde der 18.10.19 12:30 Uhr vereinbart.
Beispielartikel
- Tipps zum Schreiben eines Wiki-Artikels
- Beispiel-Artikel von Prof. Göbel
- Beispiel-Artikel von Prof. Schneider
→ zurück zum Hauptartikel: Geschwindigkeitsermittlung