Projekt 81: Inbetriebnahme und Objekttracking des LiDAR-Lite v3

→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)
Autor: Isaac Mpidi-Bita und Thomas Miska
Betreuer: Prof. Schneider
Aufgabe
Inbetriebnahme eines Low-Cost- LiDAR sowie eine Objektbildung und -tracking zum visualisieren der aufgenommen Daten.
Erwartungen an die Projektlösung
- Inbetriebnahme des LIDAR-Lite v3 von Garmin mit Arduino
- Erstellung eines Matlab und Simulink Treibers zur Echtzeitverarbeitung
- Recherchieren Sie geeignete Verfahren zur Objektbildung und zum Objekttracking
- Setzen Sie eines dieser Verfahren um.
- Bewertung der Ergebnisse mit geeigneter Referenz (z.B. Topcon Total Station)
- Softwareentwicklung nach HSHL Standard in SVN
- Darstellung der Funktion des LiDARs in einem YouTube Video
- Test und wissenschaftliche Dokumentation
- Live Vorführung während der Abschlusspräsentation
Hinweis: In Projekt 82 entsteht eine 3D-Schwenkeinheit. Beachten Sie, dass die 3D Daten des Sensors sowie die horizontale und vertikale Winkelmessung in Echtzeit verarbeitet werden muss. Stimmen Sie die Schnittstellen frühzeitig ab.
Einleitung
Im Rahmen des GET-Praktikums sollen Student eigene mechatronische Projekte erstellen und durchführen. Dabei sammeln Studenten eine erste Erfahrung in der Planung, Durchführung und Lösungen von spannenden Projekte, die in Ihren späteren Berufsleben begleiten werden. In dieser Artikel wird das Projekt 81 "Inbetriebnahme und Objekttracking des LiDAR-Lite v3" vorgestellt. Für die Carolo Cup AG der HSHL werden Ansätze zur Umgebungsüberwachung des Fahrzeuges benötig. Dementsprechend hat sich das Team für ein LiDAR-System zur Objektdetektion und -Tracking. Dafür werden Kenntnisse in der Fachgebiet, wie Mechanik, Elektrotechnik und Informatik, benötigt. Im späteren Einbau auf dem Fahrzeug wird ein 360-Grad Erfassung benötig. Parallel zu dieser Projekt läuft das Projekt "3D-Schwenkeinheit für einen LiDAR-Lite v3", das die Halterung und den rotatorischen Teil des LiDAR-System konstruiert.
Projekt
Folgender Abauf wurde für das Projekt aufgestellt:
Planung:
Die Projektplanung erfolgt mittels Gantt-Chart, Lasten- und Pflichtenheft
Beschaffung:
Für die Beschaffung wird eine QV-Beschaffung genutzt, da der LiDAR nach Abschluss in der Carolo Cup AG genutzt wird. Die Auswahl des LiDAR Lite v3 entstand durch berücksichtig von Kosten, Lernerfolg und Anforderungen des Carolo Cup Hochschulwettbewerbs.
Durchführung:
Als erstes wurde die Möglichkeit der Programmierung eines LiDARs recherchiert. Um die Funktionsfähigkeit und die Messgenauigkeit des Sensor im Nahbereich sicherzustellen, wurden die vom LiDAR gemessenen Werte mit deren einer Gliedermaßstab vergliechen. Desweiteren wurde die Genauigkeit des Sensor auf entfernte Objekten getestet. Hierfür wurde als Referenz das von BOSCH Laser-Entfernungsmesser GLM 50 eingesetzt. Anschließend wurde der Sensor auf verschiedenen Oberflächen,- wie durchsichtige, reflektierenden,- getestet. und Nach Durchführung mehreren Testen könnte man feststellen, dass der Sensor für die gewünschte Anwendung geeignet ist. Damit das Projekt nicht von der parallel-laufenden Projekt, war die Konstruktion eines provisorischen Schwenkeinheit notwendig.
Auf dem Breadboard wurde mit Hilfe der vorhandenen Datenblätter die Schaltung konzipiert. Diese haben wir in Fritzing erstellt und konnten anschließend unsere Bauteile anschließen
Hierfür werden Programmablaufpläne erstellt und in Software umgewandelt.
Die Aufgaben werden in folgenden Fachbereiche der Mechatronik eingeteilt:
- Mechanik
- Bau einer temporären Prototypen Schwenkeinheit zu Testzwecken
- Funktionstest des Prototypen
- Bau einer temporären Prototypen Schwenkeinheit zu Testzwecken
- Elektrotechnik
- Erstellung von Steckplatine und Schaltpläne
- Funktionstest auf korrekte Verdrahtung
- Erstellung von Steckplatine und Schaltpläne
- Angewandte Mathematik
- Koordinatentransformation
- Koordinatentransformation
- Softwareentwicklung
- Programmierung Servomotoren und des LiDAR-Sensors
- Auswertung der erfassten Sensordaten
- Ausgabe in einem Diagramm
- Erstellen einer Point Cloud
- Programmierung Servomotoren und des LiDAR-Sensors
Test:
In einem Abschließenden Test wird die Schwenkeinheit von Projekt 82 und der Software zusammen getestet. Für Notfälle wird eine provisorische Schwenkeinheit verwendet.
Präsentation und Dokumentation:
Das Projekt wird abschließend auf der Projektmesse am 18.01.2019 vorgestellt.
Projektplan
![]()
V-Modell
![]()
Materialbeschaffung
- LiDAR Lite V3 von Garmin
- 2 x HS-422 Servomotor
- Schwenkeinheit
- Kondensator 680 μF
Verwendete Software
- Arduino Software IDE 1.8.1
- MATLAB/Simulink 2018a
- Fritzing
- Processing
- Tortoise SVN
Technische Übersicht
Datenblätter
Datenblatt: LiDAR Lite V3
Datenblatt: HS-422
LiDAR-Lite v3
| Eigenschaft | Daten |
|---|---|
| Abmessung |
48 mm x 40 mm x 20 mm |
| Spannungsversorgung |
4.75 V bis 6 V |
| Stromverbrauch | 105 mA, Leerlauf 130 mA, kontinuerlich |
| Messbereich | 40 m |
| Genauigkeit | +/- 2,5 cm |
| Schnittstelle | I2C oder PWM |
Servomotor HS-422
| Eigenschaft | Daten |
|---|---|
| Betriebsspannung |
4.8V - 6.0V |
| Betriebsgeschwindigkeit (4.8V) |
0.21sec/60° |
| Drehbereich |
0-180° |
| Abmessung |
40.6x19.8x36.6mm |
LiDAR Funktionsweise
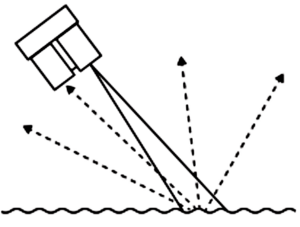
LiDAR steht für Light Detection Ranging. Der Sensor nutzt das optoelektrische Effekt zur Abstandsmessung. Anhand eines Transmitter wird ein Signal gesendet und vom Objekt reflektiert. Der Abstand wird in Abhängigkeit der Zeitdifferenz zwischen Senden und Empfang des Signals. Solch ein Verfahren wird Laufzeitverfahren genannt. Hier sendet der Sensor ein Laserstrahl aus und erhält nach einer unbestimmten Zeit durch eine Reflexion am Objekt den Strahl zurück.

Allgemein lässt sich der zurückgelegte Weg des Stahls wie folgt berechnen:
Dabei ist :
: der zurückgelegte Weg
: Geschwindigkeit
: Zeitdifferenz
Um der Abstand zu ermitteln, sollte man den zurückgelegten Weg halbieren. Ein weiterer zu betrachtenden Aspekt ist, dass der Laser Strahl sich mit Lichtgeschwindigkeit ausbreitet. Die Lichtgeschwindigkeit läutet Ideal lässt sich dementsprechend der Abstand folgendermaßen berechnen:
Dabei ist :
: Abstand bzw. Distanz
: Lichtgeschwindigkeit
: Zeitdifferenz
- Diffuses Licht
-
-
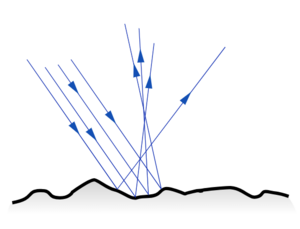


In der Wirklichkeit müsste man zusätzliche Aspekten betrachten. Auf Oberflächen, wie zum Beispiel Flächen mit großen Rauheit, verhält sich das Licht anders. Man sagt, die Wellenlänge "reflektiert diffus". Dabei kann reflektierenden Licht zu einem späteren Zeitpunkt empfangt werden. Die Formel lässt sich folgendermaßen umschreiben:
Dabei ist :
: Abstand bzw. Distanz
: Lichtgeschwindigkeit
: Zeitdifferenz
Hardwareaufbau
Schaltplan

Steckplatine

Mathematischen Hilfsmittel und Implementierung


Für die Darstellung des Bildes werden Punkten einzeln aufgenommen. Ein Punkt wird in der kartesischen Koordinaten mit -, -, und -Wert gekennzeichnet. In diesem Projekt wurde zwei Servomotoren und den LiDAR Lite v3 zur Ermittlung von Punkten. Die Punkten werden somit in Kugelkoordinaten dargestellt. Der von LiDAR ermittelte Abstand wird als Radius , der obere und der untere Servomotor werden jeweils mit und gekennzeichnet. Für die spätere Montage im Fahrzeug des Carolo Cup AG werden wir uns per Konvention an Fahrzeugkoordinatensystem anhalten. Deshalb benennen wir bereits in dieser Projekt als YAW-Winkel und als PITCH-Winkel. Deshalb spielen Koordinatensystem eine wichtige Rolle. Die Umrechnung von Kugelkoordinatensystem ins kartesische erfolgt durch:
Für die Vorführung wird das LiDAR-System nicht verwendet werden. Hierfür wird ein Darstellung des Raums nachgebildet. Aus diesem Grund wird eine andere variante der Repräsentation der Kugelkoordinaten angewendet. Hierfür wird die Geographischen Koordinatensystem angewendet. Der Unterschied liegt an die Richtung des Winkel . Der Winkel eilt um
vor. Und somit . In der Allgemeine Formel eingesetzt, erhalten wir:
Mit der Erkenntnis, dass Sinus und Cosinus ebenfalls um phasenverschoben sind, können wir die Gleichungen so darstellen:
Die Koordinatentransformation lässt sich in MATLAB folgendermaßen implementieren:
function [x y z] = transformCoord2(radius, yawAngle, pitchAngle)
% transformCoord2- Description
% Die Funktion wandelt die Messpunkte von Kugelkoordinaten
% ins kartesische
% Syntax: [x y z] = transformCoord2(radius, yawAngle, pitchAngle)
%% Winkelumrechnung von Degree zu Bogenmaß
theta = double(pitchAngle * pi / 180);
phi = double(yawAngle * pi / 180);
%% Koordinatentransformation
x = radius * cos (theta) * cos (phi);
y = radius * cos (theta) * sin (phi);
z = radius * sin (theta);
end
Flussdiagramm

Steuerung mit Arduino IDE
Die erste Inbetriebnahme des Sensors wurde mit der Arduino IDE durchgeführt. Dieser Schritt diente der ersten praktischen Auseinandersetzung mit dem Sensor, sowie ein Funktionstest des Sensors mit dem geplanten Schaltplan.
Der folgende Code ermöglicht ein 3D-Scan in einem 180° Drehbereich (bedingt durch die Servomotoren).
void loop() {
//Sweep Yaw servomotor
for (yawAngle = 0; yawAngle <= 180; yawAngle += YAW_STEP) {
servoYaw.write(yawAngle);
//Sweep Pitch servomotor.
if(pitchAngle < 90){
for (pitchAngle = 0; pitchAngle <= 180;pitchAngle+= PITCH_STEP){
servoPitch.write(pitchAngle);
sendeDaten();
}
} else {
for (pitchAngle = 180; pitchAngle >= 0;pitchAngle-= PITCH_STEP){
servoPitch.write(pitchAngle);
sendeDaten();
}
}
}
}
void sendeDaten(){
// Daten aufnehmen, konvertieren und an Schnittstelle bereitstellen
[...]
}
end
Um die Messwerte visuell darstellen zu können, wurde ein zusätzliches Programm verwendet. Das Programm heißt Processing und erstellt aus diesen Messwerten eine PointCloud. Mit dieser PointCloud konnte anschließend ein 3D Plot erstellt werden. Nachfolgend befindet sich der Code für das erstellen der PointCloud.
void draw() {
[...]
// Lese serielle Schnittstelle
String serialString = serial.readStringUntil('\n');
if (serialString != null) {
String[] coordinates = split(serialString, ' ');
if (coordinates.length == 3) {
pointList.add(new PVector(float(coordinates[0]), float(coordinates[1]), float(coordinates[2])));
}
}
// zeichne Point-Cloud
for (int index = 0; index < pointList.size(); index++) {
PVector v = pointList.get(index);
if (index == pointList.size() - 1) {
// Draw a line between Lidar and last point
stroke(255, 15, 15);
line(0, 0, 0, v.x,v.y,v.z);
}
// Draw point with a variable color
stroke(255-v.z, 255-v.y, 255-v.x);
point(v.x, v.y, v.z);
}
}
[...]
Durch diesen ersten erfolgreichen Test konnten wir nun Probleme erkennen und diese im Verlauf des Projektes berücksichtigen. Probleme die uns aufgefallen waren:
- Arduino in seiner Leistung eingeschränkt
- Koordinatentransformation wird benötigt
- Der LiDAR ist in seinem Messbereich eingeschränkt
Einbindung von MATLAB
Nach der ersten erfolgreichen Durchführung mit dem Arduino Code, wurde dieser in MATLAB/Simulink umgesetzt. Dabei stellte sich heraus, dass wir die Bibliothek für den LiDAR Lite v3 benötigen. Schlussendlich haben wir das auslesen der LiDAR Lite Messwerte über die Arduino IDE durchgeführt und diese über die Serielle Schnittstelle dem MATLAB/Simulink Programm zur Verfügung gestellt.
%% Auslesen der Daten aus der serielle Schnittstelle
disp('============================================================')
disp(' Datenaufnahme vom Arduino ')
disp('============================================================')
tic;
for i=1:1:10000
received = fgets(sObject);
disp(i);
zwischenspeicher = strsplit(received,' ');
%% Daten vorverarbeitung
rohdatenDouble(i,1)= cellfun(@str2double,zwischenspeicher(1));% Radius
rohdatenDouble(i,2)= cellfun(@str2double,zwischenspeicher(2));% Yaw
rohdatenDouble(i,3) = cellfun(@str2double,zwischenspeicher(3));% Pitch
[transFdaten(i,1) transFdaten(i,2) transFdaten(i,3)] = transformCoord(...
rohdatenDouble(i,1), ...
rohdatenDouble(i,2), ...
rohdatenDouble(i,3));
end
dlmwrite('messwerte.xyz',transFdaten, 'delimiter','\t');
timePart = toc;
time = time + timePart;
disp('============================================================')
disp('Die Messdaten wurde erfolgreich aufgenommen und gespeichert.')
disp([' benötigte Zeit: ', num2str(timePart), ' Sekunden'] )
disp('============================================================')
Ergebnis
Bildliche Darstellung der Ergebnisse
Echtzeit-Ergebnis
Initialisierung
Initialisierung erfolgreich
benötigte Zeit: 0.3951 Sekunden
Datenaufnahme vom Arduino
Die Messdaten wurde erfolgreich aufgenommen und gespeichert.
benötigte Zeit: 729.4195 Sekunden
Messdaten laden
Laden der Daten erfolgreich.
benötigte Zeit: 0.15703 Sekunden
Ausgabe der Ergebnissen
Ausgabe erfolgreich
benötigte Zeit: 3.7837 Sekunden
benötigte Zeit: 3.7837 Sekunden
Programm erfolgreich ausgeführt
benötigte Zeit für die komplete Ausführung: 733.7553 Sekunden
Zusammenfassung
Lessons Learned
- Projektplanung (in der Praxis)
- Funktionsweise eines LiDARS und dessen Verwendung
- Koordinatentransformation
- PointCloud
- Unvorhergesehene Probleme können zu einer Abweichung vom Projektplan führen.
- 3D-Plot
- Unterschied zwischen günstigen und teuren Servomotoren. (Genauigkeit, Fehleranfälligkeit, Qualität)
Ausblick
In Zukunft sollte der LiDAR andere Fahrzeuge erkennen und somit das Carolo Cup AG Fahrzeug beim Umgehen von Hindernissen behilflich sein. Ein SLAM Algorithmus ist ebenfalls in Zukunft denkbar um die verwendete Rechenleistung nach einigen Runden auf ein Minimum zu reduzieren.
Projektunterlagen
YouTube Video
Weblinks
- Lidar and Point Cloud Processing
- 3-D line plot
- Ground Plane and Obstacle Detection Using Lidar
- LiDAR Processing
- LiDAR Data Processing
Literatur
- Lothar Papula: Mathematik für Ingenieure und Naturwissenschaftler - Anwendungsbeispiele: 222 Aufgabenstellungen aus Naturwissenschaft und Technik mit ausführlich kommentierten Lösungen. Verlag: Wiesbaden : Vieweg+Teubner Verlag, 2012, ISBN: 9783834821294.
- Reinhard Lerch: Elektrische Messtechnik Analoge, digitale und computergestüzte Verfahren. Springer-Verlag Berlin Heidelberg 2007, ISBN 978-3-540-73610-3.
- Lars Schnell: LiDAR – Funktionsweise und Anwendungsgebiete in der VFX-Industrie Bachelorarbeit im Studiengang Audiovisuelle Medien. Hochschule der Medien Stuttgart, 2016, url: [1]
---
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)