Matched-Filter
Autoren: Phillip Blunck, Marius Schaffer
Betreuer: Prof. Schneider
"Unter Optimalfilter (engl. matched filter) versteht man in der Nachrichtentechnik ein Filter, welches das Signal-Rausch-Verhältnis (engl. signal to noise ratio, SNR) optimiert. In der Literatur findet man auch häufig die Bezeichnungen Korrelationsfilter, Signal-angepasstes Filter (SAF) oder nur angepasstes Filter. Das Optimalfilter dient zur optimalen Bestimmung des Vorhandenseins (Detektion) der Amplitude oder der Lage einer bekannten Signalform in Gegenwart von Störungen (Parameterschätzung)" [1].
Aufgaben
- Analysieren Sie die Funktion des Matched-Filters im Ardumower Quellcode.
- Setzen Sie das Matched-Filter in Simulink um.
- Testen Sie die Funktion.
- Dokumentieren Sie Ihre Ergebnisse wissenschaftlich.
Deadline für diese Teilaufgabe: 09.11.17
Herangehensweise
- Machen Sie sich mit dem Quelltext des Ardumower Projektes vertraut.
- Mit welcher Abtastrate wird der ADU betrieben?
- Wie funktioniert das Matched-Filter?
- Machen Sie sich anhand der Literatur unten mit der Theorie des Matched-Filters vertraut.
- Machen Sie Aufzeichnungen mit dem Oszilloskop. Im Vergleich müssen hier die Eingangsgrößen für das Filter aufgezeichnet werden.
- Machen Sie Aufzeichnungen für unterschiedliche Abstände von Draht sowie außerhalb, innerhalb und auf dem Draht.
- Lesen Sie diese Aufzeichnungen sequenziell in Simulink ein.
- Wenden Sie das Matched-Filter darauf an, so dass der Wert 1 für innerhalb und -1 für außerhalb der Leiterschleife ausgegeben wird.
- Ersetzen Sie die offline Datenquelle durch die Echtzeitmessungen vom Arduino.
- Testen Sie das System, so dass auch für die Echtzeitmessungen der Wert 1 für innerhalb und -1 für außerhalb der Leiterschleife ausgegeben wird.
- Lässt sich aus der Signalstärke der Abstand zum Draht schätzen?
- Dokumentieren Sie Messaufbau, Durchführung und Ergebnis in diesem Artikel.
Theorie
Versuchsaufbau/Auswertung mit Oszilloskop
Als erste Simulation eines Matched-Filters wird mit einem Oszilloskop die empfangenen Signale innerhalb und außerhalb einer Perimeterschleife aufgenommen und aufgezeichnet. In den Abbildungen 1 bis 3 sind die verschiedenen Aufzeichnungen des Oszilloskops zu sehen. In gelb ist jeweils das Signal der Senderbox und in blau das empfangenen Signal des Empfängers zu sehen. Die aufgezeichneten Werte werden nun mit einen USB-Stick ausgelesen und im nächsten Kapitel mit Matlab/Simulink auf den Matched Filter angewendet.
-
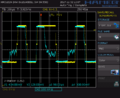
Abb.1: Perimeterschleife Signal innerhalb der Schleife
-
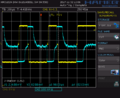
Abb.2: Perimeterschleife Signal außerhalb der Schleife
-
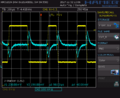
Abb.3: Perimeterschleife Signal weit außerhalb der Schleife



Matched Filter Anwendung in Simulink
Mithilfe der aufgenommenen Werte des Oszilloskops ist es möglich mit dem Signal Generator Block in Matlab/Simulink die empfangenen und gesendeten Signale zu erzeugen und diese an den Matched Filter weiterzugeben. In der Abb. 4 sind das Sendersignal und die 3 verschiedenen empfangenen Signale der Empfängerspule mit dem Signalgenerator erzeugt worden. Anhand der Messwerte des Oszilloskops erzeugt der Signal Generator das passende Signal.
-

Abb.4: Die erzeugten Signale im Signalgenerator
-

Abb.5: Siumlink Matched-Filter-Modell
-
Abb.6: Signalergebnis innerhalb der Schleife
-

Abb.7: Signalergebnis außerhalb der Schleife
-

Abb.8: Signalergebnis weit außerhalb der Schleife

Aufgrund der erhaltenen gefilterten Werte des Matched-Filters aus der Simulink Library ist eine eindeutige Zuordnung des Standortes in Bezug auf die Perimeterschleife nicht gewährleistet. Außerdem kann anhand dieses Filter ebenfalls nicht der Abstand des Roboters zur Perimeterschleife detektiert werden. Als Lösung für dieses Probelem wird eine eigenständige S-Funcction mit dem vorhandenen Arduino C-Code umgesetzt. Diese Lösung wird im nächsten Kapitel erläutert.
Ergebnis
Quelltext
Literatur
- Ardumower Wiki: Sendeschleife
- YouTube-Video: Ardumower: perimeter wire, correlation, matched filter (theory) - www.ardumower.de
- Matched filter simulator
- Mathworks Artikel - Matched Filtering (R2017b) inkl. Beispiel
- Mathworks Artikel - phased.MatchedFilter System object
- Handbuch Radar und Radarsignalverarbeitung S. 157-195: Matched Filter, Likelihood Ratio Filter und Prewhitening Filter
- Hufschmid, M.: Information und Kommunikation: Grundlagen und Verfahren der Informationsübertragung.. Wiesbaden: Teubner, 2007, S. 157-161. ISBN-13: 978-3835190771
- Mark Richards, Mark Richards: Fundamentals of Radar Signal Processing. Mcgraw-Hill Education Ltd, 2. Aufl. 2013. ISBN-13: 978-0071798327
- Skolnik, Merrill: Introduction to Radar Systems. Mcgraw Hill Book Co, 3. Aufl. 2003. ISBN-13: 978-0072881387
- Oppenheim, A.; Schafer,R: Discrete-Time Signal Processing. Pearson Education Limited. 3. Aufl. 2013. ISBN-13: 978-1292025728
- Ohm, J.-R.; Lüke, H. D.: Signalübertragung: Grundlagen der digitalen und analogen Nachrichtenübertragungssysteme. Berlin: Springer, 12. Auflage 2014. ISBN=3540692568
Einzelnachweise
→ zurück zum Hauptartikel: Perimeterschleife