SDE WS25: AP 2.1 Spurerkennung mit der Pixy2.1

Autor: Lukas Berkemeier
Einleitung
Im Rahmen des Sprints SDE Systementwicklung WS25/26: Spurverfolgung mit Kamera ist es die Aufgabe, einen Autonomen Mobilen Roboter via Kamera und Spurerkennung in der rechten Fahrspur geregelt fahren zu lassen. Zur Umsetzung dieser Aufgabe wird ein AlphaBot mit einem Pixy2.1 Kamerasensor genutzt. Dafür wurde die Pixy Kamera an die Kamerahalterung am AlphaBot angebracht. Softwareseitig wurde die Spurerkennung in Matlab Simulink realisiert. Mit dem Block "Pixy 2 Vision Sensor" aus der Simulink Bibliothek "Simulink Support Package for Arduino Hardware" werden Anfangs- und Endkoordinaten eines Vektors, bei erkannter weißer Linie, sowie eine Intersection Flag bei Abzweigung der Linie ausgegeben.
Anforderungen
| ID | Priorität | Inhalt | Ersteller | Datum |
|---|---|---|---|---|
| 1 | 1 | Die Ausgegebenen Werte des Kamerasensor liegen für X im Bereich 0 bis 78 | Lukas Berkemeier | 25.11.2025 |
| 2 | 1 | Die Ausgegebenen Werte des Kamerasensor liegen für Y im Bereich 0 bis 51 | Lukas Berkemeier | 25.11.2025 |
| 3 | 2 | Die Pixy 2.1 wird an der Kamerahalterung am Alphabot angebracht | Lukas Berkemeier | 25.11.2025 |
| 4 | 2 | Zur Spannungsversorgung und Datenübertragung wird die Pixy 2.1 mit dem Alphabot verbunden | Lukas Berkemeier | 25.11.2025 |
| 5 | 2 | Die Spurerkennung wird in Matlab Simulink realisiert | Lukas Berkemeier | 25.11.2025 |
| 6 | 2 | Die Datenübertragung erfolgt über I2C | Lukas Berkemeier | 25.11.2025 |
Materialliste
| ID | Anzahl | Komponente |
|---|---|---|
| 1 | 1 | Pixy 2.1 |
| 2 | 4 | Jumperkabel Male/Female 15 cm |
Pinbelegung

| Pin | Signal | Farbe |
|---|---|---|
| J2/2 | 5V+ | Rot |
| J2/5 | I2C SCL | Weiß |
| J2/6 | GND | Braun |
| J2/9 | I2C SDA | Schwarz |

| Pin | Signal | Farbe |
|---|---|---|
| 5V | 5V+ | Rot |
| GND | GND | Braun |
| SCL | I2C SCL | Weiß |
| SDA | I2C SDA | Schwarz |
Inbetriebnahme
Die Pixy2.1 wurde nach Anleitung des Artikels Inbetriebnahme_der_Pixy_2.1_mit_Simulink in Betrieb genommen.
Kameraeinstellungen
Für die Spurerkennung ist die Kamera mit folgenden Werten eingestellt worden:
kamerawerteSpurerkennung.rpm
Softwarentwurf und Umsetzung
Die Umsetzung der Spurerkennung wurde mithilfe der Inbetreibnahmeanleitung realisiert.
SVN-Link: Spurerkennung.slx
- Spurerkennung in Simulink und Pixymon
-
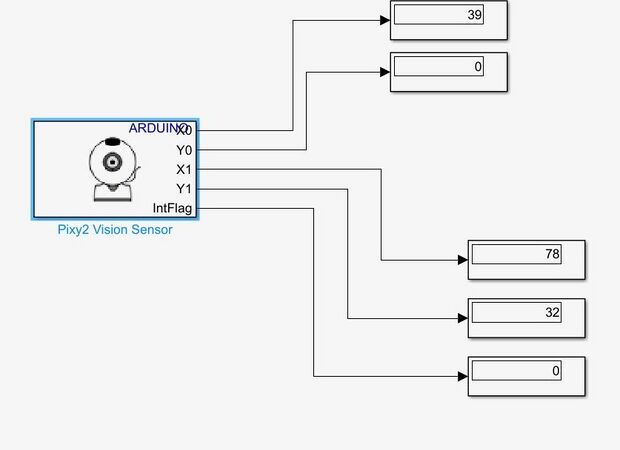 Abb. 4: Simulink - Pixy 2 Spurerkennung
Abb. 4: Simulink - Pixy 2 Spurerkennung -
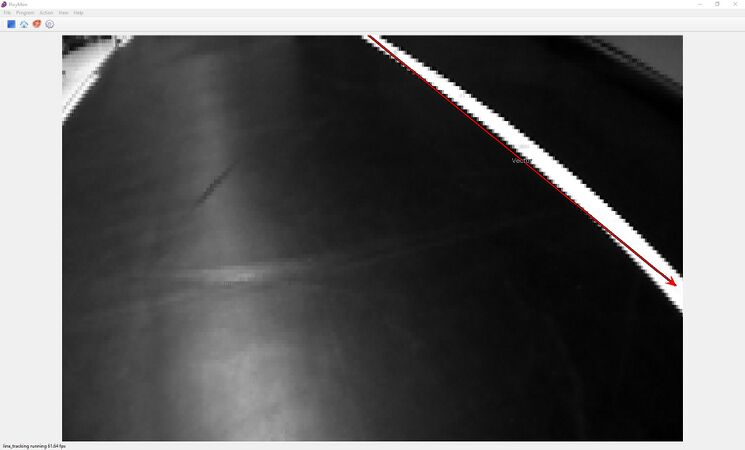 Abb. 5: Erkannter Vektor in Pixymon
Abb. 5: Erkannter Vektor in Pixymon


Modultest
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testerperson | Datum | Erfüllt |
|---|---|---|---|---|---|---|---|
| 1 | Die Ausgegebenen Werte des Kamerasensor liegen für X im Bereich 0 bis 78 | Pixymonvektor über die gesamte Breite der Kamera | Für X0 wird 0 ausgegeben, für X1 wird 78 ausgegeben | Für X0 wird 0 ausgegeben, für X1 wird 78 ausgegeben | Lukas Berkemeier | 08.01.2026 | ✓ |
| 2 | Die Ausgegebenen Werte des Kamerasensor liegen für Y im Bereich 0 bis 51 | Pixymonvektor über die gesamte Höhe der Kamera | Für Y0 wird 0 ausgegeben, für Y1 wird 51 ausgegeben | Für Y0 wird 0 ausgegeben, für Y1 wird 51 ausgegeben | Lukas Berkemeier | 08.01.2026 | ✓ |
| 3 | Die Pixy 2.1 wird an der Kamerahalterung am Alphabot angebracht | Lukas Berkemeier | 08.01.2026 | ✓ | |||
| 4 | Zur Spannungsversorgung und Datenübertragung wird die Pixy 2.1 mit dem Alphabot verbunden | Pixy 2.1 Pin J2/2 wurde mit einem 5V des Arduino verbunden, ein GND Pin des Steckers J2 wurde mit einem GND des Arduino verbunden | Pixy 2.1 Pin J2/2 wurde mit einem 5V des Arduino verbunden, J2/6 wurde mit einem GND des Arduino verbunden | Lukas Berkemeier | 08.01.2026 | ✓ | |
| 5 | Die Spurerkennung wird in Matlab Simulink realisiert | Lukas Berkemeier | 08.01.2026 | ✓ | |||
| 6 | Die Datenübertragung erfolgt über I2C | I2C Einstellungen in Simulink, Pixymon getroffen, Hardware mit I2C Schnittstelle verbunden | Datenübertragung erfolgt über I2C | Lukas Berkemeier | 08.01.2026 | ✓ |
Zusammenfassung
Mit dem Arbeitspaket 2.1 Spurerkennung mit der Pixy 2.1 wurde der Kamerasensor nach Anleitung in Betrieb genommen und mit Simulink realisiert. Die Kamera erkennt die Außenlinie mithilfe der Linienerkennug. Die Koordinaten der erkannten Verktoren werden in Simulink ausgegeben und können zur Berechnung der Ist-Ablage des Alphabot zur Solllinie bzw. zur rechten Außenlinie genutzt werden.
→ zurück zum Hauptartikel: SDE Praktikum Systementwurf SoSe2025
→ zurück zum Artikel: SDE-Team 2025/26
→ zurück zum Artikel: Spurverfolgung mit Kamera