SDE WS25: AP 2.1 Spurerkennung mit der Pixy2.1

Autor: Lukas Berkemeier
Einleitung
Im Sprint SDE Systementwicklung WS25/26: Spurverfolgung mit Kamera ist es die Aufgabe, einen Autonomen Mobilen Roboter via Kamera und Spurerkennung in der rechten Fahrspur geregelt fahren zu lassen. Zur Umsetzung dieser Aufgabe wird ein AlphaBot mit einem Pixy2.1 Kamerasensor genutzt. Dafür wurde die Pixy Kamera an die Kamerahalterung am AlphaBot angebracht. Softwareseitig wurde die Spurerkennung in Matlab Simulink realisiert. Mit dem Block "Pixy 2 Vision Sensor" aus der Simulink Bibliothek "Simulink Support Package for Arduino Hardware" werden Anfangs- und Endkoordinaten eines Vektors, bei erkannter weißer Linie, sowie eine Intersection Flag bei Abzweigung der Linie ausgegeben.
Anforderungen
| ID | Inhalt | Ersteller | Datum |
|---|---|---|---|
| 1 | Die Pixy 2.1 wird an der Kamerahalterung am Alphabot angebracht | Lukas Berkemeier | 25.11.2025 |
| 2 | Zur Spannungsversorgung und Datenübertragung wird die Pixy 2.1 mit dem Alphabot verbunden | Lukas Berkemeier | 25.11.2025 |
| 3 | Die Spurerkennung wird in Matlab Simulink realisiert | Lukas Berkemeier | 25.11.2025 |
| 4 | Die Datenübertragung erfolgt über I2C | Lukas Berkemeier | 25.11.2025 |
Materialliste
| ID | Anzahl | Komponente |
|---|---|---|
| 1 | 1 | Pixy 2.1 |
| 2 | 4 | Jumperkabel Male/Female 15 cm |
Pinbelegung

| Pin | Signal | Farbe |
|---|---|---|
| J2/2 | 5V+ | Rot |
| J2/5 | I2C SCL | Weiß |
| J2/6 | GND | Braun |
| J2/9 | I2C SDA | Schwarz |

| Pin | Signal | Farbe |
|---|---|---|
| 5V | 5V+ | Rot |
| GND | GND | Braun |
| SCL | I2C SCL | Weiß |
| SDA | I2C SDA | Schwarz |
Inbetriebnahme
Softwarentwurf und Umsetzung
- Spurerkennung in Simulink und Pixymon
-
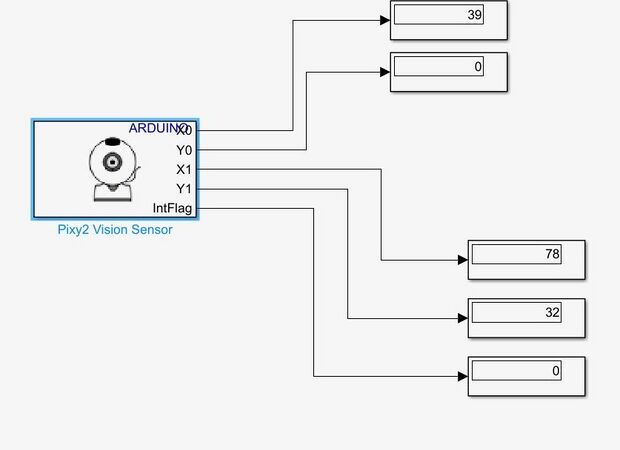 Abb. 4: Simulink - Pixy 2 Spurerkennung
Abb. 4: Simulink - Pixy 2 Spurerkennung -
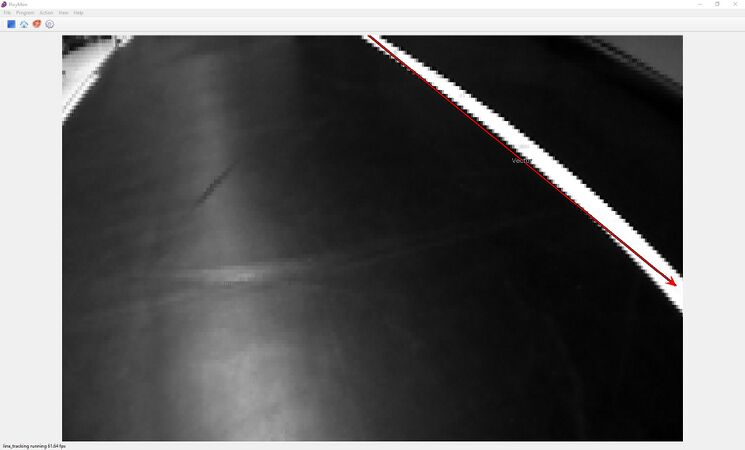 Abb. 5: Erkannter Vektor in Pixymon
Abb. 5: Erkannter Vektor in Pixymon

