SDE WS25: messeMittellinie.ino
Autor: Benutzer: Lukas Berkemeier
Einleitung/Funktion

Die Funktion messeMittellinie() aus dem Modul messeMittellinie.ino soll die Distanz der Mitte der Mittellinie zum zentralen Sensor des Alphabot (Abbildung 1, x-Achse) in mm berechnen. Als Eingangswerte werden die Werte des Arrays aus den fünf Tracking-Sensoren genutzt. Die Werte aus dem Array werden dann in einen Wert von 0 bis 4000 umgerechnet und aus diesem Wertebereich wiederum die Distanz von der Mittellinie zum Alphabot berechnet.
Funktionaler Systementwurf
Anforderungen
Die Anforderungen werden aus SDE WS25: AP 1.6 Messung der Mittellinie entnommen.
Technischer Systementwurf
Der Systementwurf entspricht dem Modulentwurf aus Abbildung 2.
-
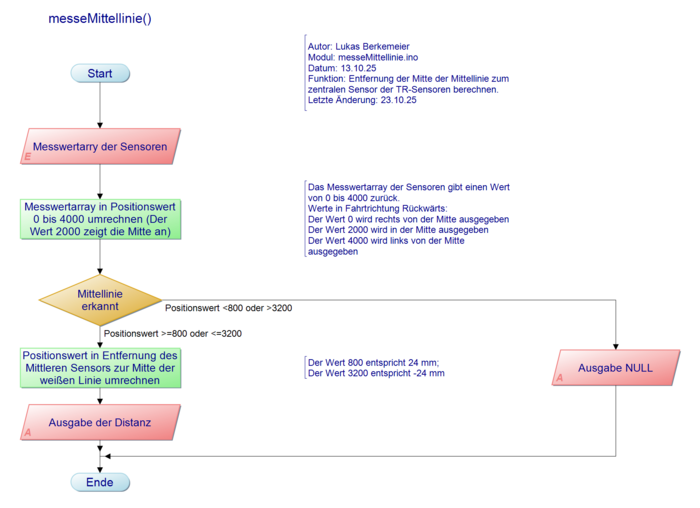 Abb. 2: messeMittellinie.ino
Abb. 2: messeMittellinie.ino

Komponentenspezifikation
Die Distanz zur Mittellinie wird durch die Messwerte der Tracking-Sensoren ermittelt.
- Umrechnen der fünf Sensorwerte in einen Wertebereich mittels der Funktion readLine() aus der Bibliothek TRSensors.h mit Normierung und gewichteter Mittelwertberechnung. Das Prinzip ist in AlphaBot Linienverfolgungsssensor beschrieben.
- Umrechnung des Wertebereichs in die Distanz mit der Funktion map()
Umsetzung
messeMittellinie.ino
|
int messeMittellinie(unsigned int MesswertArray[])
{
int distanz;
/* Position der Linie lesen. Das Array für die Messwerte MesswertArray muss als Argument übergeben werden.
Rückgabewert position in [0..4000]. 2000 Zeigt die Mitte an. */
int Positionswert = trs.readLine(MesswertArray, true); //zweite Variable: white_line, standardmäßig false, false = schwarze linie, true = weiße linie
if(Positionswert <800 || Positionswert >3200)
{
return 50;
}
else
{
distanz = map(Positionswert, 800, 3200,24,-24);
}
Serial.print(Positionswert);
Serial.print(";");
return distanz;
}
|
Modultest
Da es sich bei dieser Entwicklung um die eines einzelnen Moduls handelt, schließt der Modultest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 2). Zum Testen des Moduls wird das Modul aus der Umsetzung genutzt, indem sich die Werte zur Messung der Mittellinie im seriellen Monitor ausgegeben werden.
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Messung: Alphabot zentral auf der weißen Linie (0 mm)
|
Messwertarray der TR-Sensoren
[58 85 952 61 60] |
0 mm | 1 mm | Lukas Berkemeier | 13.10.2025 |
| 2 | Messung: Alphabot rechts von der weißen Linie (24 mm) am festgelegten Ende
 |
Messwertarray der TR-Sensoren
[215 861 39 36 20] |
24 mm | 24 mm | Lukas Berkemeier | 13.10.2025 |
| 3 | Messung: Alphabot links von der weißen Linie (-24 mm) am festgelegten Ende
 |
Messwertarray der TR-Sensoren
[99 73 73 473 787] |
-24 mm | -23 mm | Lukas Berkemeier | 13.10.2025 |
Fehlerbehebung
Nach der ersten Modulplanung sollte die Spannweite wie in Abbildung 5 von beiden äußeren Sensoren zentral über der Mitte der Mittellinie, mit 65 mm Spannweite genutzt werden. Mit der Funktion map() wurden den Werten 350-3650 die Entfernungen 33 bis -33 mm zugewiesen. Bei dieser Spannweite kam es im Bereich der äußeren Sensoren immer zu Messungenauigkeiten. Zur Fehlerbehebung wurde die Spannweiter auf 48 mm (+-24 mm) verringert und den Werten 800-3200 die Entfernungen 24 bis -24 mm zugewiesen. Im Modultest wurden die Änderungen als passend bewiesen.

Eine weitere Fehlerursache ist die Kalibrierung bzw. die Beleuchtung der Sensoren. Je nach Beleuchtung können verschiedene Werte gemessen werden. Ein möglicher Schritt zur Fehlerbehebung wäre das Anbringen einer Beleuchtung für die Sensoren um die Beleuchtung möglichst konstant zu halten.
→ zurück zum Hauptartikel: SDE WS25: AP 1.6 Messung der Mittellinie