Laborversuch Gyroskop mit DS1104
Autor: Lars Engeln & Sven Brinkmann
Betreuer: Prof. Schneider
Einleitung
In diesen Praktikum wird ein Motor über einen Drehknopf bedient, damit die Drehgeschwindigkeit variabel eingestellt werden kann. Auf dem Motor wird ein Drehteller mit einer Gyroskop Halterung montiert,
sodass das Gyroskop im Stillstand (Ruheposition) kalibriert werden kann. In diesem Versuch wird das Gyroskop (GY-35-RC) verwendet. Die Vorrichtung dient zum Vergleichen der Winkelgeschwindigkeit, zwischen
dem Gyroskop und einer Referenzmessung. Diese Referenzmessung wird zunächst durch eine Einstellung in der Motorsteuerung realisiert, sollte diese Funktionsweise nicht standhalten wird auf eine Geschwindigkeitsmessung
mithilfe einer Drehachse und Lochscheibe z.B Speedsensor LM393 zurückgegriffen. Die berechneten Ergebnisse vom Gyroskop und der Referenzmessung werden auf einem Display angezeigt.
Anforderungen
| ID | Inhalt | Klasse | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|
| 1 | Als Hauptsensor kommt ein analoges Gyroskop (GY-35-RC) zum Einsatz. Darauf verbaut ist ein muRata ENC-03RC Einachsgyro. Dies ist bereits vorhanden. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 2 | Ein Motor dreht das Gyroskop mit konstanter Geschwindigkeit im Bereich von ±300 °/s. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 3 | Die Drehgeschwindigkeit soll über einen Drehknopf eingestellt werden. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 4 | Die wahre Geschwindigkeit (Referenz) wird mit einem Drehencoder auf ±0,1 °/s bestimmt. | NFR | Prof. Schneider | 10.10.2023 | ||
| 5 | Als Messwerterfassungskarte kommt eine dSpace DS1104 R&D Controller Board zum Einsatz. | FR | Prof. Schneider | 10.10.2023 | ||
| 6 | Mit der Messwerterfassungskarte werden die Gierrate des Gyro und des Referenzsystems erfasst. | FR | Prof. Schneider | 10.10.2023 | ||
| 7 | Referenzgeschwindigkeit und Messwert werden auf eine Display angezeigt. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 8 | Der Messaufbau muss für Studentische Praktika robust und langlebig sein. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 9 | Die digitale Signalverarbeitung erfolgt über MATLAB/Simulink. | NFR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 10 | Die Anzeige der Mess- und Referenzdaten erfolgt in dSpace ControlDesk. | NFR | Prof. Schneider | 10.10.2023 | ||
| 11 | Im Stillstand muss der Gyrooffset kalibriert werden. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 12 | Die Messwerte Gierrate und Winkel sind mitsamt Messunsicherheit anzuzeigen. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 13 | Die Spannungsversorgung kann über ein Labornetzteil erfolgen. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 14 | Der Aufbau muss möglichst kompakt gestaltet werden, damit er platzsparend gelagert werden kann. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
Funktionaler Systementwurf/Technischer Systementwurf
Funktionaler Systementwurf
Im funktionalen Systementwurf wurde das System in mehrere Subkomponenten unterteilt, die jeweils für eine spezifische Teilaufgabe zuständig sind. Durch die Zusammensetzung dieser Komponenten wird die Gesamtaufgabe des Laborversuchs erfüllt. Die Unterteilung in spezifische Subkomponenten ermöglicht es, das Gesamtsystem übersichtlich und verständlich zu gestalten und die Entwicklung des Projekts zu strukturieren.
- Arduino: Der Mikrocontroller wertet die Sensordaten aus und stellt Sie dem Anwender zur Verfügung. Mit dem Ergebnis wird das Display angesteuert.
- Display: Das Display visualisiert dem Anwender die Messergebnisse.
- Referenzmessung: Diese Komponente misst die Winkelgeschwindigkeit des Motors.
- Motortreiber & Drehknopf: Der Motortreiber & Drehknopf steuert die Energiezufuhr des Motors und begrenzt somit dessen Leistung.
- Schleifring: Der Schleifring dient zu Energieversorgung und Übertragung der Sensordaten des Gyroskop.
- Mechanik-Baugruppen: Mit den Mechanik Baugruppen wird das gesamte Laborgestell beschrieben, es dient zum fixieren des Gyroskop sowie zum abdämpfen von Schwingungen.
In Abb.1 wird zunächst der funktionale Systementwurf dargestellt.
Bei dem Signalfluss in (Abb.2) werden zunächst ein Arduino und ein LCD-Display verwendet, da auf diese Weise die aktuellen Werte des Gyroskops und des Referenzwertes angezeigt werden können.
-
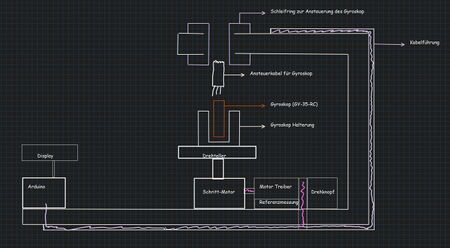 Abb. 1 Funktionaler Systementwurf
Abb. 1 Funktionaler Systementwurf -
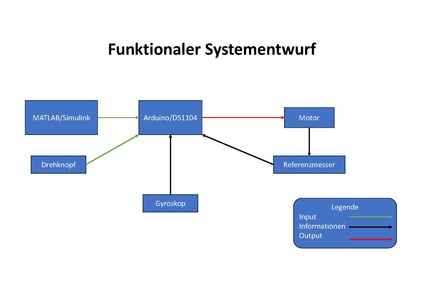 Abb.2 Funktionaler Systementwurf Signalfluss
Abb.2 Funktionaler Systementwurf Signalfluss


Komponentenspezifikation
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 23/24: Angewandte Elektrotechnik (BSE)