Kommunikation Hokuyo LiDAR
Autor: Isaac Mpidi Bita (Diskussion)
Meilenstein 1:
- Diagnoseschnittstelle
- Recherche der Toolkette des Vorgangssemester
- Treiber Installation
- Hokuyo LiDAR via USB an PC (C-Quellcode, Visual Studio)
- Objektdatenverarbeitung analysieren und dokumentieren
- Überprüfung der vorliegende Dokumentation (ggf. Überarbeiten, aktualisieren)
- Diagnoseschnittstelle LiDAR in Control Desk (Objektliste, XY-Plotter)
- Rapid Control Prototyping
- Einweisung über den Einsatz der dSPACE Karte an das Team
- Einsatz der dSPACE Karte durchführen, nicht lauffähige Projekt debuggen und lauffähig machen
Meilenstein 2:
- Diagnoseschnittstelle
- Aktualisierung des Schnittstellendokumentes
- Rapid Control Prototyping
- Überprüfung bidirektionale Verbindung PC via RS232 zu DS1104
- Dokumentation als Signalflussplan
- Wiki Artikel zur bidirekionalen Verbindung
Inbetriebnahme des Hokuyo LiDAR via USB
Treiber Installation
Verfügbare Software
Debugging der Online Simulation
Einleitung
- Verlinkung auf zur Wikiseite zur Fehlermeldungen
Debug des Modells
Error
Error RTI Build Error
Starting build procedure with RTI 7.0 (RTI1104, 02-May-2013) Model: "AKT" ---------------------------------------------------------------------- *** Using configuration set : "ModelReferencing" *** Working directory : "D:\SVN\SDE_Praktikum\MTR_SDE_Praktikum\Software\CaroloCupFahrzeug" *** Initializing code generation ### Starting Simulink Coder build procedure for model: AKT ------------------------------------------------------------ RTI Build Error Configuration Parameters dialog: Specification of the Fixed-step size with 'auto' is not supported in this version of RTI. TIP: For this option you can set a default value that applies to new models. To do so, open the Model Explorer and edit the Configuration Preferences of the Simulink Root model. ------------------------------------------------------------ *** Stopped RTI build procedure for model: AKT. ----------------------------------------------------------------------
Bedeutung
Der konkrete Buildfehler entsteht, weil die Schrittweite (Fixed-Step size) in Ihrem Modell nicht korrekt konfiguriert ist. MATLAB bietet hier eine Funktion "auto" - diese kann aber von Echtzeitsystemen wie der DS1104 nicht genutzt werden.
Behebung
- Simulink-Subsystem in einer neuen Simulink-Blank-Modell kopieren
- Jede einzelnen Block des Subsystem überprüfen
- Und Modell neu builden
Empfehlung
Hierfür empfehlt das dSPACE-Support einen fixen Wert mit einer Schrittweite von 1ms (= 0.001).
Error Line 110
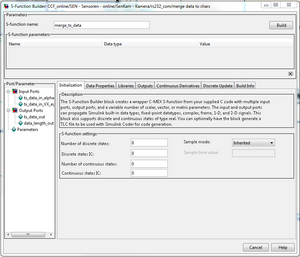
Nicht gebuildete S-Function
Bei Änderung bzw. Verlust der Dateien muss die S-Function immer neu gebuildet werden.
Behebung
- Doppelklick auf der gewünchten S-Function
- Klicken SIe auf Build
- Klicken Sie auf für die Überschreibung bzw. Overwriting
- Klicken SIe auf Close
Sie werden einen Status erhalten, ob die Bildung erfolgreich oder fehlhaft war.
-
 Menu S-Function
Menu S-Function -
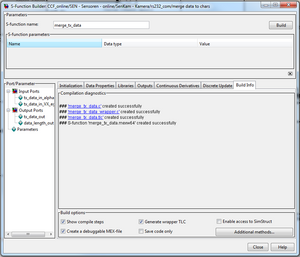 Status der Funktionsbildung
Status der Funktionsbildung


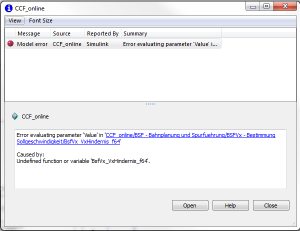
Nicht definierte Variablen
Error evaluating parameter 'Value' in 'CCF_online/BSF - Bahnplanung und Spurfuehrung/BSFVx - Bestimmung Sollgeschwindigkeit/BsfVx_VxHindernis_f64'
-
 Fehlermeldung
Fehlermeldung -
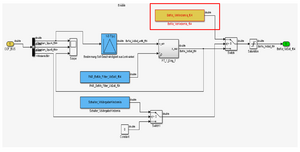 FEhler im Simulink-Modell
FEhler im Simulink-Modell


Bedeutung
Die Funktion oder die genannte Variable wurde nicht definiert.
Behebung
Um den Fehlher zu beheben:
- Gehen Sie in der SVN-Ordner \Software\CaroloCupFahrzeug\parameter
- Wählen Sie die Parameterfile (*.m-File), wo die die Variable definiert wird,
in diesem Fall "param_BSF.m"
- Initialisieren Sie die gewünchte Parameter
in diesem Fall "BsfVx_VxHindernis_f64"

Achtung: Wenn diese Fehlermerdung häufig auftaucht, verifizieren Sie, ob die Verlinkung richtig gemacht wurde
Verbindungsfehler zu der dSPACE-Karte

File I/O error on file 'rti1104.tlc' Operation that caused an error: open
Umgang
- Verifizieren Sie ob die dSPACE-Karte richtig angeschlossen ist.
- Stellen Sie sich sicher, dass die dSPACE-MTLAB-Toolbox installiert ist.
- Stellen Sie sicher, dass sie die richtige MATLAB-Version gestartet haben.
RS-232 Verbindung
Warnings
Verlinkungswarnung

Warning: bib_Sensoren_Aktoren_online.mdl, line 5405:
"bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR nach Hinten/MATLAB Function"
is a parameterized link
To view, discard, or propagate the changes for this link,
use the "Library Link" menu item
Link: bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR nach Hinten
Warning: Warning: bib_Sensoren_Aktoren_online.mdl, line 5103: "bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR/MATLAB Function" is a parameterized link. To view, discard, or propagate the changes for this
link, use the "Library Link" menu item
Link: bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs - Abstandssensorik/Infrarotsensor HR
Warning: bib_Sensoren_Aktoren_online.mdl, line 5707: "bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor VR/MATLAB Function" is a parameterized link. To view, discard, or propagate
the changes for this link, use the "Library Link" menu item
Bedeutung
Umgang
- Rechtsklick auf das Block
- Wählen Sie „Library Link“
- Klicken Sie auf „Resolve Link“. Ein Dialoge Fernster wird sich öffnen
- Wählen SIe eine Aktion aus
Merke
- Wählen Sie Push, wenn Sie wollen, dass die Änderungen in die Bibliothek übernommen werden.
- Wählen SIe Restore, wenn Sie wollen, dass der Zustand aus der Bibliothek in das Model übernommen wird.
Ergebnis
LOADING APPLICATION "CCF_online.sdf" ...
[#1] ds1104 - RTLIB: Application UUID: F9BBF58E-B4EE-4C6D-8AC3-5297A4983AA7 (0)
[#2] ds1104 - RTI: Initializing ... (720)
[#3] ds1104 - RTLIB: dSPACE slave-DSP firmware rev. 3.5 detected. (500)
[#4] ds1104 - RTI: Initialization completed (721)
[#5] ds1104 - RTI: Simulation state: RUN (700)
LOADING FINISHED
MAKE PROCESS SUCCEEDED
### Successful completion of Simulink Coder build procedure for model: CCF_online
*** Finished RTI build procedure for model CCF_online
----------------------------------------------------------------------