Gyrosensor (LPR510AL)
Dieser Artikel handelt vom im Carolo-Fahrzeug verbauten Gyrosensor, der während des SDE Praktikums im Sechsten (SS14) Semester neu verbaut wurde
Allgemein
Der Gieratensensor (LPR510AL) gibt ein analoges Ausgangsignal aus. Der Sensor wird mit einer Spannung von 3,3V bis maximal 16V betrieben.
Pinbelegung

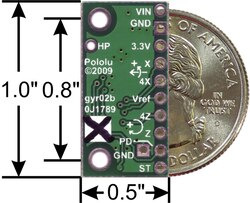{kind=link}
Die Eingangsspannung wird über den Pin 1 in den Spannungsregler(auf der Platine) gegeben, um die Betriebsspannung für VDD zu erhalten.
| Pinnummer | Pinname | Funktion |
| 1 | VIN | Spannungseingang der Platine |
| 2 | GND | Masse - 0V |
| 3 | VDD 3,3V | Eingangsspannung des Sensors |
| 4 | Y | Verdrehung um die Y-Achse ohne Verstärkung |
| 5 | 4Y | Verdrehung um die Y-Achse mit 4x Verstärkung |
| 6 | Vref | Referenzspannung |
| 7 | 4X | Verdrehung um die X-Achse mit 4x Verstärkung |
| 8 | X | Verdrehung um die X-Achse ohne Verstärkung |
| 9 | PD | Power-down (logic 0: normal mode; logic 1: power-down mode) |
| 10 | GND | Masse - 0V |
| 11 | ST | Self-test (logic 0: normal mode; logic 1: self-test) |
Funktionsverdrahtung


Beim Verdrahten ist zu beachten, dass die Spannung der Spannungsquelle nicht 16V überschreitet. Es genügt, mit einer Spannung von ca. 6 V und einen Strom von 0,1 A zu arbeiten. Die Plus-Leitung der Spannungsquelle muss an den Pin: VIN (Pin 1) angelegt werden. Die GND-Leitung der Spannungsquelle muss an den Pin: GND (Pin 2) angelegt werden. Auf der Steckplatte muss eine Verbindung zwischen dem Pin: 3,3V (Pin 3) und dem Pin: Vref (Pin 6) angebracht werden. Die Verbindung der Connector Box (dSPACE) zum Gyrosensor, muss über denn Channel 4 des Analog-Digital-Converters (ADCH4) verbunden werden. Die Plus-Leitung der Connector Box Verbindung wird an den Pin gelegt, an dem das Signal abgegriffen werden soll. Pin 4 und Pin 5 für die Y-Richtungsbewegung und Pin 7 und 8 wird X-Richtungsbewegung. Die GND-Leitung der Connector Box Verbindung wird an GND (Pin 2) geschlossen.
Verarbeitung in Simulink / ControlDesk
Um die Daten in Simulink zu Verarbeiten ist der Block der dSpace-Libery notwendig. Zum Konvertieren des analogen Ausgangssignals in ein digitales Signal notwendig, welches die Connector Box verarbeiten kann. Die konvertierten Daten werden mithilfe eines Out-Blocks weitergeben. Das Ausgangssignal wird in Spannung pro Sekunde angegeben. Diese Spannungswerte müssen integriert werden (siehe Simulink-Model: "Ausgabe_in_Grad"), um daraus die Gradänderung über die Zeit zu erhalten. Für den Parameter: "Constant" muss der später, berechnete Mittelwert eingefügt werden.

Die Signale, welche in die Out-Blocks gehen, können via ControlDesk mithilfe des Ploters dargestellt werden.
Auswertung der Daten
- Erreichbare Auflösung im Zusammenspiel mit der DS1104:
- Der Gieratensensor gibt ein analoges Ausgangssignal aus. Dementsprechend ist die Auflösung nicht bestimmbar und kann als unendlich klein angenommen werden.
- Die Auflösung des Analog-Digital-Converter gibt die Auflösung vor.
- Drift:
- Der Drift beträgt 0,0004°/sec
- Errechnet wurde der Drift durch eine Messung über einen längeren Zeitraum. Bei dieser Messung wurde die Änderung des Mittelwerts beobachtet.
- Empfindlichkeit:
- Die Empfindlichkeit lässt sich über die Formel: Empfindlichkeit = Eingang / Ausgang berechnen.
- Die Sensor Empfindlichkeit beträgt: 2,5mV/(°/sek).
- Errechnet wurde der Wert, durch schwenken des Sensors um 90° und die dadurch Verändernde Spannung(dieser Wert ist auch im Datenblatt nachlesbar)
- Hierfür ist ein genaues Eingangssignal nötig, welches mithilfe einer Messeinrichtung bestimmt werden kann.
- Unsicherheit:
- Zur Bestimmung der Unsicherheit wird der Mittelwert des Ruhesignals (keine Bewegung) benötigt. Über das Simulink-Model: "Ausgabe_Mittelwert_Berechnung" wird der Mittelwert berechnet.
- Für die vier Verschiedenen Messmodi sind folgende Mittelwerte bestimmt worden:
- 4x = 0,86359
- x = 1,26456
- 4y = 1,121592
- y = 1,25317
- Diese Werte müssen im Simulink-Model: "Ausgabe_in_Grad", unter dem Parameter: "Constant" eingetragen werden.

Weiterführende Informationen
- Allgemeine Informationen zum Gieratensensor und dem Sensorprinzip [1] Abruf: 13.05.2014
- Datenblatt des Sensors ohne Breakout-Platine[2] Abruf: 13.05.2014
- Datenblatt der Breakout-Platine mit Sensor[3]Abruf: 13.05.2014
- Vollständige Zip-Datei des Simulinkmodels [4] Abruf: 13.05.2014
- Schaltskizze [5] Abruf: 13.05.2014
![[5]](http://193.175.248.171/wiki/index.php/Datei:Schaltskizze.jpg){kind=link}