Gyrosensor (LPR510AL)
Dieser Artikel handelt vom im Carolo-Fahrzeug verbauten Gyrosensor(Gierratensensor), der während des Praktikums-SDE (SS14) Semester neu verbaut wurde.
Allgemeines
Der Gierratensensor (LPR510AL) liefert ein analoges Ausgangsignal aus. Hierbei kann der Sensor mit einer Spannung von 3,3V bis maximal 16V betrieben werden [1]. Die Funktionsweise basiert auf dem Prinzip eines Drehwinkelsensors.[2]
Pinbelegung

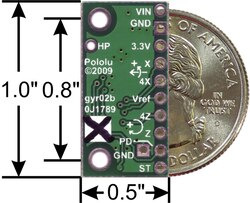
| Pinnummer | Pinname | Funktion |
| 1 | VIN | Spannungseingang der Platine |
| 2 | GND | Masse - 0V |
| 3 | VDD 3,3V | Eingangsspannung des Sensors |
| 4 | Y | Verdrehung um die Y-Achse ohne Verstärkung |
| 5 | 4Y | Verdrehung um die Y-Achse mit 4x Verstärkung |
| 6 | Vref | Referenzspannung |
| 7 | 4X | Verdrehung um die X-Achse mit 4x Verstärkung |
| 8 | X | Verdrehung um die X-Achse ohne Verstärkung |
| 9 | PD | Power-down (logic 0: normal mode; logic 1: power-down mode) |
| 10 | GND | Masse - 0V |
| 11 | ST | Self-test (logic 0: normal mode; logic 1: self-test) |
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Inbetriebnahme
Funktionsverdrahtung


Beim der Inbetriebnahme des Sensors ist wie bereits beschrieben zu beachten, dass die Eingangsspannung nicht 16V überschreitet, die Plus-Leitung der Spannungsquelle muss an den Pin: VIN (Pin 1) angelegt werden. An den Pin: GND (Pin 2) wird die GND-Leitung der Spannungsquelle angelegt werden. Weiter muss eine Verbindung zwischen dem Pin: 3,3V (Pin 3) und dem Pin: Vref (Pin 6) angebracht werden.
Zum Ablesen der Daten des Sensors, kann die Verbindung der Connector Box (dSPACE) zum Gyrosensor, wird über denn Channel 4 des Analog-Digital-Converters (ADCH4) verbunden werden, dieser wurde bei den Tests augesucht und im Simulink-Model ebenfalls ausgewählt. Die Plus-Leitung der Connector Box Verbindung wird an den Pin gelegt, an dem das Signal abgegriffen werden soll. Pin 4 und Pin 5 für die Y-Richtungsbewegung und Pin 7 und 8 wird X-Richtungsbewegung. Die GND-Leitung der Connector Box Verbindung wird an GND (Pin 2) geschlossen.
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Verarbeitung in Simulink / ControlDesk
Um die Daten in Simulink zu Verarbeiten ist der Block (MUX ADC9 der dSpace-Libery notwendig. Zum Konvertieren des analogen Ausgangssignals in ein digitales Signal notwendig, welches die Connector Box verarbeiten kann. Die konvertierten Daten (Spannungswerte) werden mithilfe eines Out-Blocks ausgeben. Diese Spannungswerte müssen integriert werden (siehe Simulink-Model: "Ausgabe_in_Grad"), um daraus die Gradänderung zu erhalten. Für den Parameter: "Constant" muss der berechnete Offsetwert (Mittelwert) eingefügt werden.

Die Signale, welche in die Out-Blocks gehen, können via ControlDesk mithilfe des Ploters dargestellt werden.
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Auswertung der Daten
Erreichbare Auflösung im Zusammenspiel mit der DS1104:
- Der Gierratensensor gibt ein analoges Ausgangssignal aus. Dementsprechend ist die Auflösung nicht bestimmbar und kann als unendlich klein angenommen werden.
- Die Auflösung des Analog-Digital-Converter gibt die Auflösung vor.
Drift:
- Errechnet kann der Drift durch eine Messung über einen längeren Zeitraum werden. Diese müssten entsprechend analysiert werden.
- Der Drift beträgt 0,0004°/sec.
Empfindlichkeit:
- Die Empfindlichkeit lässt sich über die Formel: Empfindlichkeit = Eingang / Ausgang berechnen.
- Die Sensor Empfindlichkeit beträgt: 2,5mV/(°/sek).
- Errechnet wurde der Wert, durch konstantes Schwenken des Sensors um 90°. Über die Zeit gemessen, ist die Empfindlichkeit zu berechnen.
- Aus dem Datenblatt ist dieser Wert ebenfalls zu entnehmen.
Unsicherheit:
- Zur Bestimmung der Unsicherheit wird der Offsetwert des Ruhesignals (keine Bewegung) benötigt. Über das Simulink-Model: "Ausgabe_Mittelwert_Berechnung" wird der Offsetwert berechnet.
- Für den Messmodus Y ist beispielhaft, folgender Offset bestimmt worden:
- y = 1,25336
- Dieser Wert muss im Simulink-Model: "Ausgabe_in_Grad", unter dem Parameter: "Constant" eingetragen werden.
- Mithilfe des Offsets lässt sich die Standardabweichung (Varianz) bestimmen. Die dazugehörige Formel lautet:
- Varianz:
- Standardabweichung:
- Die berechnete Varianz beträgt:
- y = 0,001228V
- Berechnet können diese Werte durch das folgende Simulink-Model werden:

Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
Quellen / Weiterführende Informationen
- ↑ "Datenblatt LPR510AL - ohne Breakout-Platine" , STMicroelectronics. [1]
- ↑ "Kraftfahrtechnisches Taschenbuch" von Karl-Heinz Dietsche, Thomas Jäger, Friedr. Vieweg & Sohn Verlag. ISBN 978-3-937137-59-9
- ↑ "Anschlusspins des LPR510AL." von Pololu Robotics & Electronics.http://b.pololu-files.com/picture/0J1875.250.jpg?4afe3fed01b3bc58fa14bda28c295f7d
- ↑ "LPR550AL Dual-Axis (Pitch and Roll or XY)",Pololu Robotics & Electronics.[2]
- ↑ "Schaltskizze für den Sensor" von Hadziric & Berysztak. [3]
- ↑ "Vollständige Zip-Datei des Simulinkmodels" von Hadziric & Berysztak. [4]
- ↑ "Vollständige Zip-Datei des Simulinkmodels" von Hadziric & Berysztak. [5]
{kind=link}
![[3]](http://193.175.248.171/wiki/index.php/Datei:Schaltskizze.jpg){kind=link}
Autor: Martin Berysztak (Diskussion) & Adem Hadziric (Diskussion) 21:36, 5. Feb. 2015 (CET)
→ zurück zum Hauptartikel: Praktikum-SDE