Regelung des Radschlupfes eines Modellautos: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 150: | Zeile 150: | ||
== Zusammenfassung == | == Zusammenfassung == | ||
== Literaturverzeichnis == | == Literaturverzeichnis == | ||
Version vom 27. September 2022, 12:52 Uhr

Autoren: Mario Wollschläger, Lukas Honerlage
Einleitung
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Das Fahrzeugmodell muss die Kinematik des als starr angenommenen Fahrzeugkörpers beschreiben. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 2 | Das Fahrverhalten muss unter der Annahme korrekt abgebildet werden, dass die Räder schlupffrei abrollen. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 3 | Am Eingang werden die Längsgeschwindigkeiten entlang der x-Achse des Fahrzeugkoordinatensystems K der Räder rechts (R) und links (L) vorgegeben. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 4 | Am Ausgang müssen
zur Verfügung stehen. |
Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 5 | Das Modell muss in Matlab/Simulink erstellt werden. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 6 | Die Rechnung des Modells erfolgt mit diskreten Zeitschritten (es sind diskrete Integratoren zu verwenden). | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 7 | Die Dokumentation muss auf Basis der Mehrkörpersystemeberechnung leicht nachvollziehbar erfolgen. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 8 | Bei der Simulation muss eine graphische Ausgabe der Position und Richtung des Fahrzeugs in x- und y-Koordinaten des I-Systems erfolgen. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
| 9 | Die Signalnamen müssen gemäß nebenstehender Abbildung gewählt werden. | Prof. Göbel | 07.06.2017 | Prof. Schneider | 08.06.2017 |
Funktionaler Systementwurf / Technischer Systementwurf
Komponentenspezifikation
Programmierung
Die Programmierung ist nun auf Basis der oben ermittelten Gleichungen möglich und erfolgt in Matlab/Simulink.
Simulink
Komponententest
Da es sich bei dieser Entwicklung um die einer einzelnen Komponente handelt, schließt der Komponententest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 2).
| ID | Testfallbeschreibung | Eingang | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|---|
| 1 | Das Fahrzeugmodell steht. | 0 | 0 | Alle Ausgänge sind Null. | OK | Prof. Göbel | 10.06.2017 |
| 2 | Das Fahrzeugmodell fährt eine Rechtskurve. | 1 | 0 | Rechtskurve: Negative Gierrate, negativer Gierwinkel. | OK | Prof. Göbel | 10.06.2017 |
| 3 | Das Fahrzeugmodell fährt eine Linkskurve. | 0 | 1 | Linkskurve: Positive Gierrate, positiver Gierwinkel. | OK | Prof. Göbel | 10.06.2017 |
| 4 | Das Fahrzeugmodell fährt geradeaus. | 1 | 1 | Keine Gierrate und Gierwinkel, . | OK | Prof. Göbel | 10.06.2017 |
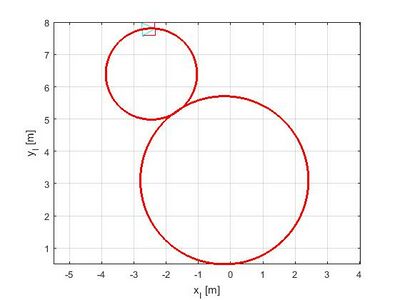
Als Abschluss dieses Artikels zeigt Abb. 6 eine Ergebnisdarstellung der Fahrzeugbewegung in I-Koordinaten (Draufsicht).
Zusammenfassung
Literaturverzeichnis
→ zurück zum Hauptartikel: