Stopplinienerkennung mit Hough-Transformation: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
KKeine Bearbeitungszusammenfassung |
||
| Zeile 1: | Zeile 1: | ||
'''Autor:''' [[Benutzer:Kevin Hustedt| Kevin Hustedt]], [[Benutzer:Moritz Oberg| Moritz Oberg]] | '''Autor:''' [[Benutzer:Kevin Hustedt| Kevin Hustedt]], [[Benutzer:Moritz Oberg| Moritz Oberg]] | ||
| Zeile 25: | Zeile 23: | ||
== Literaturverzeichnis == | == Literaturverzeichnis == | ||
Version vom 9. Januar 2021, 11:31 Uhr
Autor: Kevin Hustedt, Moritz Oberg
Einleitung
Im Praktikum des Studienschwerpunkt Systems Designe Engineering im Studiengang Mechatronik, wird ein autonom fahrendes Modellauto entwickelt. Dieses Auto soll auf einem Rundkurs fahren, der unteranderem Kreuzungen mit Stopplinien beinhaltet. Das Auto soll automatisch an diesen Stopplinien halten. Für das Stoppen muss das Auto die Stopplinien über die eingebaute Kamera erkennen und den Abstand fortlaufend berechnen. Dies geht aus dem Lastenheft des Praktikums hervor (Vgl. Abb. 1).
Lastenheft
-
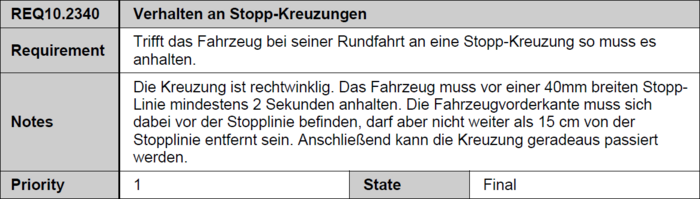 Abbildung 1: REQ.10.2340 Verhalten an Stopp-Kreuzungen
Abbildung 1: REQ.10.2340 Verhalten an Stopp-Kreuzungen
