AlphaBot Bauanleitung: Unterschied zwischen den Versionen
| Zeile 35: | Zeile 35: | ||
</gallery> | </gallery> | ||
=== Schrauben === | === Schritt 2: Schrauben vorsortieren === | ||
Es gibt verschiedene Schrauben. | Es gibt verschiedene Schrauben. | ||
*Die schwarzen Kunststoffschrauben dürfen nur mt Kunststoffmuttern verwendet werden. Sie sind sehr empfindlich und dürfen nur Handfest angeschraubt werden. | *Die schwarzen Kunststoffschrauben dürfen nur mt Kunststoffmuttern verwendet werden. Sie sind sehr empfindlich und dürfen nur Handfest angeschraubt werden. | ||
| Zeile 48: | Zeile 48: | ||
</gallery> | </gallery> | ||
=== | === Schritt 3: Bolzen vorsortieren === | ||
Es gibt drei längen an Bolzen. | Es gibt drei längen an Bolzen. | ||
Version vom 26. August 2020, 10:48 Uhr

Autoren: Marc Ebmeyer, Prof. Dr.-Ing. Schneider
Einleitung
Diese Bauanleitung bezieht sich auf den Bausatz AlphaBot-Ar-Bluetooth des Herstellers Waveshare.
Benötigte Bauteile
- Bitte als Tabelle anlegen.
Benötigte Werkzeuge
- Bitte als Tabelle anlegen.
- optional: Bastelmesser
- Überprüfen sie Ihr Set auf Vollständigkeit. Hier finden Sie die Teileliste.
- Laden sie die Li- Ionnen Akkus, beachten sie die allgemeingültigen Vorsichtsmaßnahmen beim Laden von Akkus (nicht unbewacht laden, Temperatur überwachen, Akku nicht Tiefentladen, Akkus nicht entladen zur Seite packen sondern abkühlen lassen nach benutzung und dann wieder laden, bei längerer nicht benutzung Akkus mit 70% Ladung zur Seite legen, nicht in die Sonne legen, ...).
- Bitte entladen sie sich in dem sie z.B. ein blankes Heitzungsrohr anfassen, sonst können sie die Ic's auf den Platinen beschädigen.
- Folgen sie der Schrittweisen bebilderten Bauanleitung.
[ AlphaBot Zusammenbau]
- Bitte überprüfen sie alle Steckverbinder auf sauberen Sitz
Schrittweise bebilderte Bauanleitung
Auf YouTube finden Sie ein Video als Bauanleitung. Bitte folgen sie nicht der Bauanleitung im Video, da diese fehlerhaft ist. Dieses Video kann Ihnen nur einen Überblick verschaffen und die Handhabung zeigen.
Schritt 1: Folierte Bauteile
Ziehen Sie zuerst alle Folien von den Bauteilen ab. Hierfür eignet sich ein Bastelmesser.
-
 Abb. 2: Montageplatte Vorderseite
Abb. 2: Montageplatte Vorderseite -
 Abb. 3: Montageplatte Rückseite
Abb. 3: Montageplatte Rückseite -
 Abb. 4: 2x Lochscheibe am Motor entfernen.
Abb. 4: 2x Lochscheibe am Motor entfernen. -
 Abb. 5: Inkrementalgeber Vorder- und Rückseite
Abb. 5: Inkrementalgeber Vorder- und Rückseite -
 Abb. 6: 4x Motorhalter Vorderseite
Abb. 6: 4x Motorhalter Vorderseite -
 Abb. 7: 4x Motorhalter Rückseite
Abb. 7: 4x Motorhalter Rückseite





Schritt 2: Schrauben vorsortieren
Es gibt verschiedene Schrauben.
- Die schwarzen Kunststoffschrauben dürfen nur mt Kunststoffmuttern verwendet werden. Sie sind sehr empfindlich und dürfen nur Handfest angeschraubt werden.
- Die mittelangen 3mm Schrauben.
- Die kleinen 3 mm Schrauben dienen der Montage der Messingbolzen.
- Mit den langen Schrauben werden die Motoren befestigt.
- Die 2mm Schrauben halten das Servo in Position.
- Die kleinen selbstschneidenden Schrauben dienen der Montage des Servoruderhornes an dem Ultraschallträger.
-
 Abb1: Schrauben
Abb1: Schrauben -
 Abb2: Schrauben
Abb2: Schrauben


Schritt 3: Bolzen vorsortieren
Es gibt drei längen an Bolzen.
Die 6 längsten werden auf der Bodenplatte verschraubt.
Die beiden mitleren gehören zum Ultraschallsensor und die kleinen sind Teil der Aufhängung des Liniensensors.
-
 Abb1: Bolzen
Abb1: Bolzen
Bodenplatte
Beginnen wir mit der Montage der Bodenplatte.
Dazu suchen wir 6 lange Bolzen und 6 kurze 3mm Schrauben und verschrauben alles anhand der Bilder.
Dannach legen wir die Bodenplatte erst mal zur Seite und wenden uns dem Mainboard und den Sensoren zu.
-
 Abb1:Bodenplatte
Abb1:Bodenplatte -
 Abb2: Bodenplatte
Abb2: Bodenplatte -
 Abb3: Bodenplatte
Abb3: Bodenplatte -
 Abb3: Bodenplatte
Abb3: Bodenplatte



Mainboard
-
 Abb1: Mainboard von Unten
Abb1: Mainboard von Unten -
 Abb2: Mainboard von Oben
Abb2: Mainboard von Oben -
 Abb2: Mainboard von Unten Leistungsteil
Abb2: Mainboard von Unten Leistungsteil



Akkuhalter
Der Akuhalter ist ein Universalhalter, deswegen sollte man die doppeldeutigen Symbole aus dem Halter kratzen.
Dieses geht mit einem Schlitzschraubendreher mit einem Messer oder mit einem Bohrer.
Dabei nur Oberflächlich die + und - Symbole entfernen.
Die richtigen Symbole stehen zur Sicherheit auf der Platine.
Anschließend sollten im Akkuhalter ebenfalls nur diese Symbole sichtbar sein, damit es nicht zu Verwechslungen kommt.
-
 Abb1: AlphaBot_Akkuhalter
Abb1: AlphaBot_Akkuhalter -
 Abb2: AlphaBot_Akkuhalter
Abb2: AlphaBot_Akkuhalter -
 Abb3: AlphaBot_Akkuhalter
Abb3: AlphaBot_Akkuhalter -
 Abb4: AlphaBot_Akkuhalter nach der Behandlung
Abb4: AlphaBot_Akkuhalter nach der Behandlung




Drehzahlsensor- Gabellichtschranke
Beim Drehzahlsensor hat sich ein kleiner Produktionsfehler eingeschlichen.
Dieser passt leider nicht immer in den dafür vorgesehenen Schlitz.
Dafür müssen die Ecken die noch rund sind mit einem Messer oder einer Feile Eckig gefeilt werden, bis der Sensor sauber in das Loch passt.
Dannach kann mann den Sensor mit einer 3mm Schraube 10mm lang befestigen.
Hier hat sich ein weiterer Fehler eingeschlichen.
Leider kann der Sensor nur mit der inneren Schraube befestigt werden, da bei der äußeren die Muttter gegen den Motor stoßen würde. Deswegen stecken wir außen die Schraube nur in den Sensor, ohne das wir sie mit einer Mutter befestigen, so bekommt der Sensor noch zusätzlichen halt.
-
 Abb1: Gabellichtschranke
Abb1: Gabellichtschranke -
 Abb2: Gabellichtschranke
Abb2: Gabellichtschranke -
 Abb3: Gabellichtschranke passt nicht in den gefrästen Schlitz
Abb3: Gabellichtschranke passt nicht in den gefrästen Schlitz -
 Abb4: Gabellichtschranke mit bereits installierten Ultraschallsensor und Infrarotsensor
Abb4: Gabellichtschranke mit bereits installierten Ultraschallsensor und Infrarotsensor




Motoren
Nun wechseln wir zum Mainboard und Montieren wie in den Bildern und im Video gezeigt die Motoren.
-
 Abb1: Motor
Abb1: Motor -
 Abb1: Motor
Abb1: Motor -
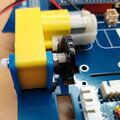 Abb1: Motor_Montage
Abb1: Motor_Montage -
 Abb2: Motor_Montage
Abb2: Motor_Montage -
 Abb3: Motor_Montage
Abb3: Motor_Montage -
 Abb4: Motor_Montage
Abb4: Motor_Montage -
 Abb5: Motor_Montage
Abb5: Motor_Montage -
 Abb6: Motor_Montage
Abb6: Motor_Montage








Infrarot-Abstandssensor
Für die Montage des Infrarot Sensores benötigen wir die schwarzen Kunststoffschrauben und Muttern.
-
 Abb1: Infrarotsensor
Abb1: Infrarotsensor -
 Abb2: Infrarotsensor
Abb2: Infrarotsensor -
 Abb3: Infrarotsensor
Abb3: Infrarotsensor -
 Abb4: Infrarotsensor
Abb4: Infrarotsensor -
 Abb5: Infrarotsensor
Abb5: Infrarotsensor





Stecker
Die Sensoren können nun wie im Video verkabelt verkabelt werden.
Linensensor
Der Linsensor wird nun genauso wie im Video beschrieben montiert. Dazu werden die kleine Messing bolzen verwendet und die kleinen 3 mm Schrauben.

Ultraschallsensor
Ebenfalls kann hier der Zusammenbau wie im Video beschrieben durchgeführt werden.
Das Servo Kabel sollte zweimal um den Servo gewickelt werden, da es sonst zu lang ist.
Bei der Montage des Servoarms auf den Servo muss man aufpassen, das man den Servo richtig ausrichtet, bevor man den Servoarm festschraubt.
Servos reagieren sehr empfindlich, wenn man an ihrem Kopf dreht.
Dieses Servo hat zudem ein Kunststoff Getriebe.
Deswegen bitte beim einstellen der Richtigen Position den Servo Kopf langsam drehen.
Der Servo dreht sich um 180Grad + (10-20Grad). Daher setzt man einen der beiliegenden Servoarme auf den Kopf und dreht den Servo vorsichtig bis zum Anschlag in eine Richtung.
Dann nimmt man den Servoarm ab und befestigt den Servoarm mit dem Ultraschallsensor so,
dass der Ultraschallsensor in die Drehrichtung zur Seite schaut etwa 110Grad aus der Mitte.
Dann dreht man den Kopf langsamm zur anderen Seite um Sicher zu stellen, dass beide den gleichen Winkel einnehmen.
Darauf wird der Servoarm mit der bei den Servoarmen beiliegenden Schraube am Servo befestigt.
-
 Abb1: Ultraschall Set
Abb1: Ultraschall Set -
 Abb2: Ultraschall
Abb2: Ultraschall -
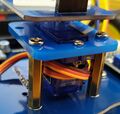 Abb3: Ultraschall Richtige Montage des Servos am Servo Träger
Abb3: Ultraschall Richtige Montage des Servos am Servo Träger -
 Abb4: Ultraschall Befestigung des Servoarms an der Ultraschallplatte
Abb4: Ultraschall Befestigung des Servoarms an der Ultraschallplatte -
 Abb5: Ultraschall Befestigung des Servoarms an der Ultraschallplatte
Abb5: Ultraschall Befestigung des Servoarms an der Ultraschallplatte -
 Abb6: Ultraschall Befestigung des Servoarms an der Ultraschallplatte
Abb6: Ultraschall Befestigung des Servoarms an der Ultraschallplatte -
 Abb7: Ultraschall Befestigung des Servoarms an der Ultraschallplatte
Abb7: Ultraschall Befestigung des Servoarms an der Ultraschallplatte -
 Abb8: Ultraschall Montage des Ultraschallsensors am Träger
Abb8: Ultraschall Montage des Ultraschallsensors am Träger -
 Abb9: Ultraschall
Abb9: Ultraschall -
 Abb10: Ultraschall
Abb10: Ultraschall -
Abb11: Ultraschall Ausrichtung des Servos im rechten Anschlag
-
 Abb12: Ultraschall Verkabelung des Servos und des Ultraschall-Sensors
Abb12: Ultraschall Verkabelung des Servos und des Ultraschall-Sensors -
 Abb13: Ultraschall Verkabelung des Servos und des Ultraschall-Sensors
Abb13: Ultraschall Verkabelung des Servos und des Ultraschall-Sensors -
 Abb14: Ultraschall Servo zweimal umwickelt
Abb14: Ultraschall Servo zweimal umwickelt













Montage Arduino
Die Hochzeit zwischen Arduino und Mainboard kann anhand des Videos vollzogen werden.
-
 Abb1:Arduino Board Pinbelegung
Abb1:Arduino Board Pinbelegung -
 Abb2: Arduino Board Pinbelegung
Abb2: Arduino Board Pinbelegung


Montage des Sensorboards
-
 Abb1: Sensorboard
Abb1: Sensorboard -
 Abb2: Sensorboard
Abb2: Sensorboard -
 Abb3: Sensorboard
Abb3: Sensorboard -
 Abb4: Sensorboard
Abb4: Sensorboard




Montage des Bluetooth Boards
Das Bluetooth Modul bitte vorsichtig auf das sensorboard aufstecken. Dabei bitte auf die Ausrichtung achten.
-
 Abb1: Bluetooth Modul
Abb1: Bluetooth Modul -
 Abb2: Bluetooth Modul im eingebauten Zustand
Abb2: Bluetooth Modul im eingebauten Zustand


Montage der Bodenplatte am Mainboard
Montieren sie nun die Bodenplatte unter dem Mainboard mit 6 kleinen Schrauben.
-
Abb1: Mainboardmontage
-
 Abb2: Mainboardmontage
Abb2: Mainboardmontage

Montage der Reifen
Die Reifen werden einfach auf die Getreibe Achse vorsichtig aufgeschoben.
-
 Abb1: Rad
Abb1: Rad -
 Abb1: Rad
Abb1: Rad -
 Abb1: Rad
Abb1: Rad



Restteile
Bitte packen Sie die verbleibenden Bauteile wieder in eine Tüte. Sie werden für ergänzende Module benötigt.
→ zurück zum Hauptartikel: Turtle Bot WS 20/21