|
|
| Zeile 25: |
Zeile 25: |
| [[Datei:CCF_AEP_Teilteam_BaumeisterHorstkoetter_Pflichten.PNG|1200px]] | | [[Datei:CCF_AEP_Teilteam_BaumeisterHorstkoetter_Pflichten.PNG|1200px]] |
|
| |
|
| Folgende Anforderungen wurden an die Karte gestellt:
| |
| {| class="mw-datatable"
| |
| ! style="font-weight: bold;" | ID
| |
| ! style="font-weight: bold;" | Inhalt
| |
| ! style="font-weight: bold;" | Ersteller
| |
| ! style="font-weight: bold;" | Datum
| |
| ! style="font-weight: bold;" | Geprüft von
| |
| ! style="font-weight: bold;" | Datum
| |
| |-
| |
| | 1
| |
| | Die Karte muss als Matrix mit der Rastergröße 30cm umgesetzt werden (Grid-Map).
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 2
| |
| | Die Perimeterschleife muss rot markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 3
| |
| | Die aktuelle Position des Mähers muss blau markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 4
| |
| | Hindernisse müssen magenta markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 5
| |
| | Unbekannte Bereiche müssen weiß bleiben.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 6
| |
| | Ungemähter Rasen muss dunkelgrün und gemähter Rasen hellgrün markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 7
| |
| | Die Karte muss zyklisch aktualisiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 8
| |
| | Die Umsetzung muss als Matlab-Skript erfolgen, so dass eine Einbindung in Simulink als Matlab-Funktion möglich ist.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 9
| |
| | Eingangsgrößen der Funktion <code>Kartenfunktion.m</code> sind
| |
| # Aktuelle Positionen in m: xNeu,yNeu
| |
| # Alter Positionsvektor in m: PosAlt
| |
| # Ausrichtung der Karte in deg: Ausrichtung
| |
| # Aktuelle Karte: Karte
| |
| # Signale zur Objekterkennung: Bumper,Ultraschall
| |
| # Signalstärke der Perimeterschleife: Perimeterschleife
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 10
| |
| | Ausgangsgrößen der Funktion <code>Kartenfunktion.m</code> sind
| |
| # Aktueller Positionsvektor in m: PosNeu
| |
| # Aktuelle Karte: Karte
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 11
| |
| | Die Initialisierung muss 1s und die zyklische Darstellung muss 1ms unterschreiten.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 12
| |
| | Bei Kommentierung und Dokumentation muss sich an die Projektrichtlinien gehalten werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| |}
| |
|
| |
| == Funktionaler Systementwurf / Technischer Systementwurf ==
| |
| Bei der Größe des zu erstellenden Modells werden die Schritte Funktionaler Systementwurf/Technischer Systementwurf des V-Modells zusammen gelegt und bereits Schnittstellen zwischen den einzelnen Blöcken definiert (vgl. Abb. 2).
| |
|
| |
| [[Datei:Schnittstellen_SelbstlernendeKarte_ArduMower.jpg|rechts|mini|300px|Abb. 2: Schnittstellen für die Modellierung einer selbstlernenden Karte]]
| |
|
| |
| == Komponentenspezifikation ==
| |
| Das Modell wird insgesamt als Komponente aufgefasst, d. h. die einzelnen Blöcke aus dem Systementwurf werden als Bestandteil der Komponente "Selbstlernende Karte" definiert. Die Funktion der Komponente "Selbstlernende Karte" wird in Form eines PAP spezifiziert (vgl. Abb. 3).
| |
|
| |
| [[Datei:PAP_SelbstlernendeKarte_ArduMower.jpg|rechts|mini|300px|Abb. 3: Spezifikation der selbstlernenden Karte]]
| |
|
| |
| == Programmierung ==
| |
| Die Programmierung unterscheidet sich
| |
| # in die Initialisierung und
| |
| # die zyklische Aktualisierung
| |
| der selbstlernenden Karte.
| |
| === Initialisierung ===
| |
| In der einmaligen Initialisierung werden die Farben der Karteninhalte entsprechend der Anforderungen festgelegt. Die <code>aColorMap</code> wird anderen Programmteilen als globale Variable zur Verfügung gestellt.
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| % Farben festlegen
| |
| cUnbekannt = [1 1 1]; nUnbekannt = 0;
| |
| cPerimeter = [1 0 0]; nPerimeter = 1;
| |
| cNichtGemaeht = [0.5 0.8 0]; nNichtGemaeht = 2;
| |
| cGemaeht = [0 1 0]; nGemaeht = 3;
| |
| cArduMower = [0 0 1]; nArduMower = 4;
| |
| cHindernis = [1 0.5 1]; nHindernis = 5;
| |
|
| |
| aColorMap = [ cUnbekannt ; cPerimeter ; cNichtGemaeht ; cGemaeht ; cArduMower ; cHindernis ];
| |
| </syntaxhighlight>
| |
| Die Karte wird aus einer Datei geladen und in Form und Größe initialisiert. Hierzu gehört auch die beschriftung der Achsen und die Darstellung des Gitters in Meter. Die Handles hierzu werden persistent gespeichert.
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| Karte = imread('libraries/mKarte.png'); % Karte laden
| |
| %% Karte in Größe und Form initialisieren
| |
| mKarte = Karte; % Ursprüngliche Karte sichern
| |
| hKarte = figure;
| |
| set(hKarte,'WindowStyle', 'normal')
| |
| hImg = imshow(Karte,aColorMap); set(gca,'YDir','normal');
| |
| hAxes = gca;
| |
| set(hKarte,'Position',[1 1 500 600],'OuterPosition',[ 550 300 500 600]); % 589
| |
| set(hAxes,'OuterPosition',[-0.1068 0 1.1819 1])
| |
| set(hAxes,'Visible','on')
| |
| xt = 0: 10:size(Karte, 2)-1;
| |
| yt = 0: 10:size(Karte, 1)-1;
| |
| for i=1:length(xt)
| |
| xtLabel{i}=num2str(xt(i)*0.3);
| |
| end
| |
| for i=1:length(yt)
| |
| ytLabel{i}=num2str(yt(i)*0.3);
| |
| end
| |
| set(gca, 'xgrid', 'on', 'ygrid', 'on', 'xtick', xt, 'ytick', 1/2+yt, 'xticklabel', xtLabel, 'yticklabel', ytLabel)
| |
| xlabel('x in m'); ylabel('y in m');
| |
| </syntaxhighlight>
| |
|
| |
| === Aktualisierung ===
| |
| Bei der zyklischen Aktualisierung muss:
| |
| * die Position in m in die Kartenmatrix umgerechnet,
| |
| * eine Aktualisierung überprüft,
| |
| * die neue Position eingetragen und
| |
| * die alte Position aktualisiert
| |
| werden.
| |
|
| |
| Die Umrechnung erfolgt über:
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| nKartenPosAlt = floor((PosAlt/0.30))+1;
| |
| nKartenPosNeu = floor((PosNeu/0.30))+1;
| |
| </syntaxhighlight>
| |
|
| |
| Eine Aktualisierung ist notwenig, wenn ein neues Matrixfeld erreicht wurde:
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| if ~isequal(nKartenPosNeu,nKartenPosAlt)
| |
| </syntaxhighlight>
| |
|
| |
| Hindernisse werden in der Karte vermerkt oder die neue Mäherposition eingetragen:
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| if Bumper==1
| |
| Karte(nKartenPosNeu(1),nKartenPosNeu(2)) = nHindernis;
| |
| mKarte(nKartenPosNeu(1),nKartenPosNeu(2)) = nHindernis; % Hindernisse nicht aus Karten löschen
| |
| else
| |
| Karte(nKartenPosNeu(1),nKartenPosNeu(2)) = nArduMower; % Neue Position des Mähers markieren
| |
| end
| |
| </syntaxhighlight>
| |
| Anschließend werden die alten Mäherpositionen gemäß Anforderungen eingefärbt:
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| switch mKarte(nKartenPosAlt(1),nKartenPosAlt(2))
| |
| case nNichtGemaeht
| |
| Karte(nKartenPosAlt(1),nKartenPosAlt(2)) = nGemaeht;
| |
| case nPerimeter
| |
| Karte(nKartenPosAlt(1),nKartenPosAlt(2)) = nPerimeter;
| |
| case nHindernis
| |
| Karte(nKartenPosAlt(1),nKartenPosAlt(2)) = nHindernis;
| |
| case nUnbekannt
| |
| Karte(nKartenPosAlt(1),nKartenPosAlt(2)) = nUnbekannt;
| |
| end
| |
| </syntaxhighlight>
| |
|
| |
| Abschließend wird der aktualisierte Inhalt der Karte dargestellt. Hierzu wird Inhalt (Bildmatrix) direkt über das Handle <code>hImg</code> aktualisiert.
| |
| <syntaxhighlight lang="matlab" style="border: none; background-color: #EFF1C1; font-size:larger">
| |
| set(hImg,'CData',Karte); % Karte aktualisieren
| |
| </syntaxhighlight>
| |
|
| |
| == Komponententest ==
| |
| <!-- Interne Info: Hier noch einzelne Arbeitsschritte einfügen, auch wer wann was kontrolliert hat. -->
| |
|
| |
| Da es sich bei dieser Entwicklung um die einer einzelnen Komponente handelt, schließt der Komponententest mit dem Testbericht die Entwicklung ab.
| |
| {| class="mw-datatable"
| |
| ! style="font-weight: bold;" | ID
| |
| ! style="font-weight: bold;" | Testfallbeschreibung
| |
| ! style="font-weight: bold;" | Eingänge x,y,PosAlt,Ausrichtung,Karte,Bumper,Ultraschall,Perimeterschleife
| |
| ! style="font-weight: bold;" | Erwartetes Ergebnis
| |
| ! style="font-weight: bold;" | Testergebnis
| |
| ! style="font-weight: bold;" | Testperson
| |
| ! style="font-weight: bold;" | Datum
| |
| |-
| |
| | 1
| |
| | Der Mäher fährt kein Feld weiter.
| |
| | 0.1, 0.0, [0;0], 0, Karte, 0, 0, 1000
| |
| | Kein neues Feld wird blau markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 2
| |
| | Der Mäher fährt auf der Perimeterschleife.
| |
| | 0.6, 0.0, [0.3;0.0], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird blau markiert, altes Feld wird rot markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 3
| |
| | Der Mäher fährt ein Feld weiter.
| |
| | 0.3, 0.0, [0;0], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird blau markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 4
| |
| | Der Mäher trifft auf ein Hindernis.
| |
| | 34.0, 4.0, [33.7;4.0], 0, Karte, 1, 0, 1000
| |
| | Neues Feld wird magenta markiert, altes Feld wird hellgrün markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 5
| |
| | Das überschreitet die Perimeterschleife in unbekanntes Gebiet.
| |
| | 0.0, 3.0, [0.3;3.0], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird weiß markiert, altes Feld wird rot markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 6
| |
| | Das Fährt auf ungemähtem Rasen.
| |
| | 0.6, 0.6, [0.3;0.3], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird blau markiert, altes Feld wird hellgrün markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 6b
| |
| | Das Fährt auf gemähtem Rasen.
| |
| | 0.6, 0.6, [0.3;0.3], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird blau markiert, altes Feld wird hellgrün markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 7
| |
| | Der Mäher fährt mit fester Zykluszeit eine simulierte Mäanderfahrt.
| |
| | Mäander simuliert, *,*,*, 0, Karte, 0, 0, 1000
| |
| | Die Karte wird zyklisch aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 8
| |
| | Einbindung des Matlab-Skriptes in Simulink.
| |
| | Mäander simuliert in Simulink
| |
| | Die Karte wird zyklisch aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 9
| |
| | Test der Eingangsparameter
| |
| | Variation der Eingangsparameter
| |
| | Die Karte wird zyklisch gemäß Anforderungen aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 10
| |
| | Test der Ausgangsparameter
| |
| | Variation der Eingangsparameter
| |
| | Die Karte wird zyklisch gemäß Anforderungen aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 11
| |
| | Laufzeitmessung
| |
| | 0.3, 0.0, [0;0], 0, Karte, 0, 0, 1000
| |
| | Die Initialisierung muss 1s und die zyklische Darstellung muss 1ms unterschreiten.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 12
| |
| | Kommentierung und Dokumentation entsprechen den Projektrichtlinien
| |
| | -
| |
| | Code Review, Artikel-Review
| |
| | OK
| |
| | Prof. Göbel
| |
| | 21.01.2018
| |
| |-
| |
| |}
| |
|
| |
| Als Abschluss zeigt die letzte Abbildung dieses Artikels eine Ergebnisdarstellung einer mäanderfärmig simulierten Mähfahrt.
| |
| [[Datei:AnimierteKarte.gif |rechts|Abb. 4: Ergebnisdarstellung der Modellierung einer selbstlernenden Karte]]
| |
|
| |
|
| == Zusammenfassung == | | == Zusammenfassung == |
Autoren: Julin Horstkötter, Levin Baumeister
DIES IST BISLANG NOCH IN TEILEN DER BEISPIELARTIKEL. DIES WIRD IN KÜRZE ANGEPASST.
Einleitung
Das im SDE Praktikum verwendete Fahrzeug ist mit diverser Sensorik ausgestattet. Dieser Artikel befasst sich insbesondere mit den für das autonome Einparken benötigten Sensoren. Der Einsatz der Sensoren leitet sich anhand von dem im Lastenheft definierten Anforderungen her.
In Kürze stellt dieser Artikel den aktuellen Stand der Einparksensorik dar. Außerdem werden zusammenhängende Funktions-Erklärungen gegeben, da die Sensoren für die Umsetzung des Einparkalgorithmus von essentieller Bedeutung sind.
Dafür werden zunächst die Anforderungen aufgezeigt, die in direkter Verbindung mit der Sensorik stehen. Im weiteren Verlauf werden die Sensoren im Detail beschrieben und erläutert. Schließlich wird auf die aktuelle Verwendung, offline sowie online, eingegangen.
Dieser Artikel wird dynamisch erweitert, so dass dieser den jeweils aktuellen Arbeitsstand berücksichtigt. Der aktuelle Bearbeitungsstand des AEP-Softwarebereichs ist jederzeit in einem teamspezifischen SVN-Branch erreichbar.
Das systematische Vorgehen bei der Entwicklung des Modells orientiert sich am V-Prozessmodell.
Anforderungen
Im Lastenheft werden zur Einparksensorik folgende Anforderungen gestellt:
- Funktionale Anforderungen:
- Nicht-funktionale Anforderungen:

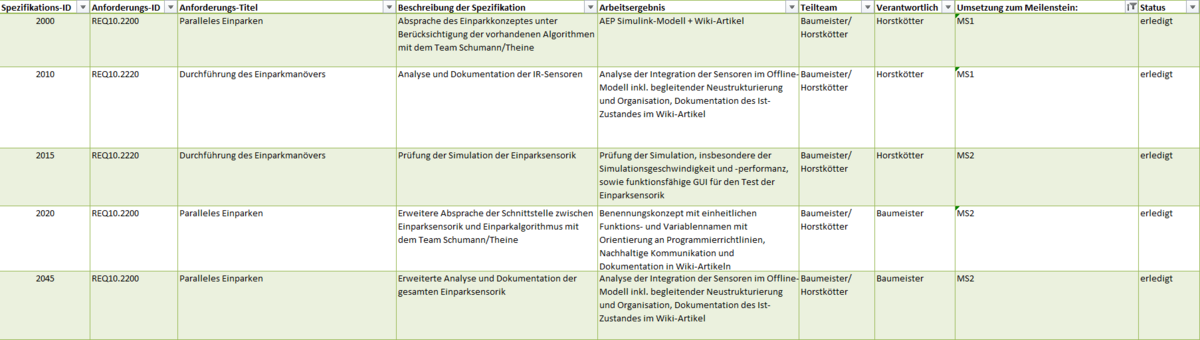
Das Pflichtenheft im aktuellen Stand zeigt sich wie folgt:
Zusammenfassung
Eine selbstlernende Karte wurde gemäß Anforderungen programmiert, getestet und dokumentiert. Als Ansteuerung wurde eine einfache Mäanderfahrt implementiert. Nun kann die Mähstrategie anhand dieser Karte in Echtzeit visualisiert werden.
Link zum Quelltext in SVN
SVN: ArduMower Softwareprojekt
→ zurück zum Hauptartikel: Projekt ArduMower




