|
|
| Zeile 2: |
Zeile 2: |
|
| |
|
| == Einleitung == | | == Einleitung == |
| Dieser Artikel beschreibt die Entwicklung einer neuen Powerpanel-Platine. | | Dieser Artikel beschreibt die Entwicklung einer neuen Powerpanel-Platine für das autonome Auto. |
|
| |
|
| == Anforderungen== | | == Anforderungen== |
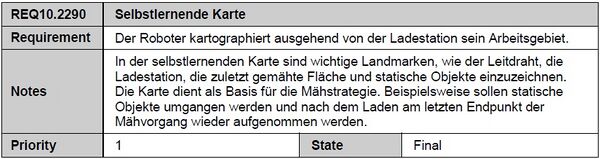
| Im Lastenheft des Projektes ArduMower wird die Erstellung einer selbstlernenden Karte gefordert:<br> | | Im Lastenheft des Projektes autonomes Auto wird die Energieversorgung mit Akku gefordert:<br> |
| [[Datei:Req10 2290.jpg|600px]] | | [[Datei:Req10 2290.jpg|600px]] |
|
| |
|
| Zeile 11: |
Zeile 11: |
| [[Datei:ID0170 ArduMower Pflichtenheft.jpg|1200px]] | | [[Datei:ID0170 ArduMower Pflichtenheft.jpg|1200px]] |
|
| |
|
| Folgende Anforderungen wurden an die Karte gestellt:
| |
| {| class="mw-datatable"
| |
| ! style="font-weight: bold;" | ID
| |
| ! style="font-weight: bold;" | Inhalt
| |
| ! style="font-weight: bold;" | Ersteller
| |
| ! style="font-weight: bold;" | Datum
| |
| ! style="font-weight: bold;" | Geprüft von
| |
| ! style="font-weight: bold;" | Datum
| |
| |-
| |
| | 1
| |
| | Die Karte muss als Matrix mit der Rastergröße 30cm umgesetzt werden (Grid-Map).
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 2
| |
| | Die Perimeterschleife muss rot markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 3
| |
| | Die aktuelle Position des Mähers muss blau markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 4
| |
| | Hindernisse müssen magenta markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 5
| |
| | Unbekannte Bereiche müssen weiß bleiben.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 6
| |
| | Ungemähter Rasen muss dunkelgrün und gemähter Rasen hellgrün markiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 7
| |
| | Die Karte muss zyklisch aktualisiert werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 8
| |
| | Die Umsetzung muss als Matlab-Skript erfolgen, so dass eine Einbindung in Simulink als Matlab-Funktion möglich ist.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 9
| |
| | Eingangsgrößen der Funktion <code>Kartenfunktion.m</code> sind
| |
| # Aktuelle Positionen in m: xNeu,yNeu
| |
| # Alter Positionsvektor in m: PosAlt
| |
| # Ausrichtung der Karte in deg: Ausrichtung
| |
| # Aktuelle Karte: Karte
| |
| # Signale zur Objekterkennung: Bumper,Ultraschall
| |
| # Signalstärke der Perimeterschleife: Perimeterschleife
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 10
| |
| | Ausgangsgrößen der Funktion <code>Kartenfunktion.m</code> sind
| |
| # Aktueller Positionsvektor in m: PosNeu
| |
| # Aktuelle Karte: Karte
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 11
| |
| | Die Initialisierung muss 1s und die zyklische Darstellung muss 1ms unterschreiten.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| | 12
| |
| | Bei Kommentierung und Dokumentation muss sich an die Projektrichtlinien gehalten werden.
| |
| | Prof. Schneider
| |
| | 18.01.2018
| |
| | Hr. Kreuer
| |
| | 18.01.2018
| |
| |-
| |
| |}
| |
|
| |
|
| == Technischer Systementwurf == | | == Technischer Systementwurf == |
Autor: Kevin Hustedt, Moritz Oberg
Einleitung
Dieser Artikel beschreibt die Entwicklung einer neuen Powerpanel-Platine für das autonome Auto.
Anforderungen
Im Lastenheft des Projektes autonomes Auto wird die Energieversorgung mit Akku gefordert:
Im Pflichtenheft taucht daraufhin der Punkt Selbstlernende Karte auf, konkrete Anforderungen werden jedoch nicht näher spezifiziert:

Technischer Systementwurf
Zusammenfassung
Link zum Quelltext in SVN
→ zurück zum Hauptartikel: Praktikum SDE

