Im Rahmen des SDE-Praktikums sollen die Studierenden an das Carolo-Cup-Projekt weiterarbeiten. Dies hat für Ziel, das Erlangen praktischer Erfahrung bei eingenstädigen Entwicklung eines mechatronischen System und das Erlangen von Kompetenzen in der Projektplannung innerhalb eines Teams.
Dieser Artikel befasst mit zwei Themen: die Diagnoseschnittstelle und der Einsatz der dSPACE-Karte DS1104. Im Diagnoseschnittstelle wird hauptsächlich die Kommunikation LiDAR-PC via USB zu erstellen. Für den Einsatz der dSPACE-Karte ist das Ziel ein kompilierbares und lauffähiges Simulink-Online-Modell spätestens am Ende des Semester zu haben.
und den PC (Pineview D525 NM10 mini-ITX Motherboard)
Die Verbindung zwischen den Bauteilen werden gemäß Schnittstelle Dokumentation und sieht folgendenmaßen aus:
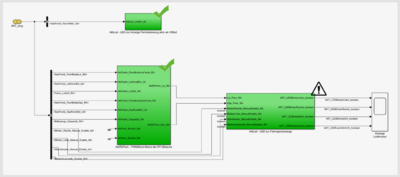
Die Kamera und der Laserscanner werden am PC verbunden. Die Kamera via Ethernet und der Laserscanner via USB. Die Beide Bausteine werden mit Hilfe C/C++-Quellcode angesprochen. Die Projekt-Solution holt die Information beiden Sensoren und verarbeitet diese. Die verarbeiteten Daten werden an der dSPACE-Karte über RS232-Schnittstelle übermittelt.
Softwarearchitektur für die Kommunikation
Der C/C++-Quellcode für den LiDAR und die Kamera befindet sich im SVN-Ordner OSE Fusion Software Final. Da die Kommmunikation sich mit der Datenfusion LiDAR-Kamera beschäftigt, ist es wichtig in welche Datei des Projekt die notwendige Informationen bekommen können. Die Software wirkt auf dem ersten Blick unübersichtlich.
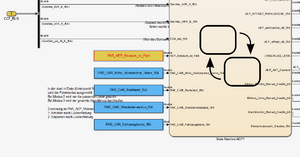
Die für die Kommunikation relevente Datein wurde in folgenden Diagramm abgebildet.
RS232-Headerdatein
Inbetriebnahme des Hokuyo LiDAR via USB
Treiber Installation und Softwareinstallation
Um das Hokuyo LiDAR in der Laborrechner verwenden zu können. Benötigt man einen entsprechenden Treiber. Dies finden Sie im Ordner .../trunk/Tools/Lidar_Treiber
Um den Treiber zu installieren brauchen Sie ADMIN-Rechte. Als Ansprechpartner können Sie sich an der Prof. Dr. Schneider oder an Ilja Raza wenden.
Die Installationsvorgang läuft wie folgt:
Installation des Hokuyo-LiDAR-Software
Inbetriebnahme
Software
Auf dem rechten Bild sind alle Funktionen, Strukturen und Variablen des LiDAR-Objektes.
Ausgabe
Startet man die Application, bekommt man folgenden Fenster. Links das Kamerabild in schwarz-weiß und rechts die Objektbildung des LiDARs.
Zu betrachten ist das die Software ohne angeschloßene Kamera nicht kompilierbar ist.
Debugging der Online Simulation
Das Debugging und die Kompilierbarkeit des Online-Modells war einer der Hauptziele für den Sommersemmer 2019. In dieser Abschnitt werden wichtige Erkenntnisse dieser Aufgabe dokumentiert.
Alle Fehler könnten nicht in diesem Artikel zusammengefasst werden. Deshalb muss demnächst beim Auftauchen einer Fehlermeldung bzw. eines Warnings eine ausführlische Fehlerbehebung dokumentiert.
Debug des Modells
In dieser Aufgabe wird systematisch das komplette Modell debuggt. Wichtig ist es erstmal alle Fehlerursachen zu finden und zu versuche diese zu beseitigen. Da das erste Ziel einer kompilierfähiges Online Modell ist, werden vorerst die Richtigkeit und Plausibilität der Werte bzw. Datenfluss nicht berücksichtigt. Im Wintersemester 2019-2020 wird sich jedes Team um die Datenrichtigkeit deren Blöcke gewährleisten.
Damit das ganze System kompilierfähig ist muss nicht jeder Block kompilierbar sein. Weil es Signale, Variablen und Funktionen genutzt werden, die von anderen Blocks abhängen.
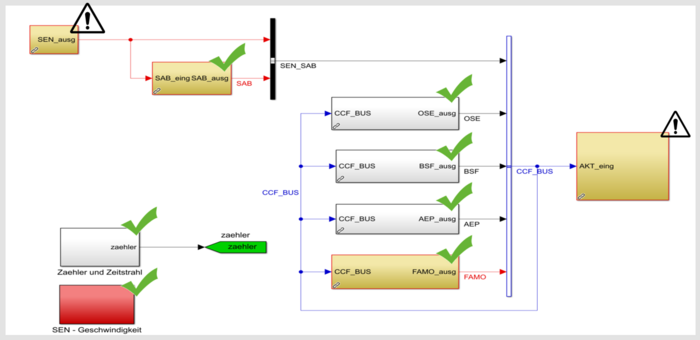
Das Online-Modell beinhaltet folgenden Blöcke:
Sensoren (SEN)
Aktoren (AKT)
Sensorsignalaufbereitung (SAB)
Objekt- und Spurerkennung (OSE)
Bahn und Spurführung (BSF)
Autonomes Einparken (AEP)
Fahrtmodus (FAMO)
Zähler und Zeitstrahl
SEN - Geschwindigkeit
Situation am Anfang des Sommersemester 2019
Am Anfang des SoSe 2019 ist das Online-Modell nicht mehr kompilierbar. Die mögliche Ursache dafür ist zum Beispiel die weiterentwicklung des Modells mit höheren MATLAB Revisionen oder das nicht ordentlichen Mergen des Daten in SVN. Weiteren Hintergründe sind die Nicht-Betrachtung der Warnings beim Erstellen der Bibliotheken oder den falschen Auswahl der Solver beim Implementieren. All diesen nachlässigen Fehlern haben dazu geführt, dass das Modell im Laufen der Jahren nicht mehr Kompilierfähig war.
Kenntnis
Der SEN-, AKT- und der AEP-Block können nicht gebuildet werden
Das OSE-, BSF- und FAMO-Block können nur gebuildet werden, wenn die nicht verlinkt waren.
Kompilierbar sind die Blöcke: SAB, Zaehler und Zeitstahl und SEN-Geschwindigkeit.
Vorgehensweise
Suche eines frühere kompilierbare Online-Modell und dies auf aktuellsten Stand zu bringen
Suche eines frühere nicht kompilierbare Online Modell mit wenigen Fehler, und ab dem Punkt debuggen
Aktuelles Modell blockweise debuggen
Error
In dieser Abschnitt werden die gesammlten Fehlermeldungen und die vorgehensweise des Debugging erläutert.
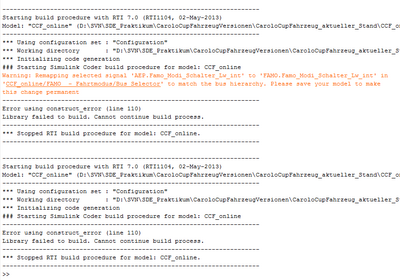
Error Line 110: Library Failed to Build
Bedeutung
Der Fehler ist zur Stande gekommen, weil die Bibliotheken Stateflow-Diagramm enthalten. Außerdem wurde das Modell und die Bibliothek in Verschieden Umgebungen bzw. MATLAB-Versionen implementiert.
Behebung
Um diesen Fehler zu beheben soll einige Anpassung im Stateflow Configuration File angevracht werden.
Geben Sie in den MATLAB Kommando matlabroot ein. Damit öffnet sich der Speicherort von MATLAB.
Wechseln Sie mit dem Explorer in das Verzeichnis c:\Program Files\MATLAB\R2013a\toolbox\<\code>.
Gehen Sie in Stateflow
Gehen Sie erneut in Stateflow
Gehen in private
Öffen Sie die Datei infomatman.m
Nehmen Sie folgenden Änderungen durch
Links ist das Dokument unverändert und Rechts ist die Veränerung, die vorgenommen werden
Änderung 1
kommentieren Sie die Zeile 189 aus.
kopieren Sie die eben kommentierte Zeile darunten und bennen SIe den Parameter "machineID" nach "mainMachineID" um.
Änderung 2
Benennen Sie die Variable "NewInstanceInfo" nach "infoStruct.chartInfo(i).instanceInfo" um.
Löschen Sie die darunter stehenden if-Bedingung und Variablenzuweisung.
Änderung 3
Löschen Sie die Funktion "mergeNewInstanceInfoWithOld"
Error Datenübergabe
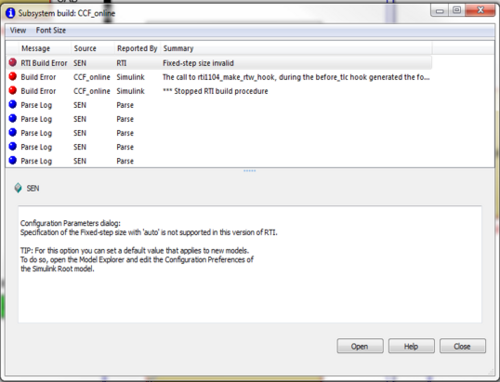
Error RTI Build Error
Starting build procedure with RTI 7.0 (RTI1104, 02-May-2013)
Model: "AKT"
----------------------------------------------------------------------
*** Using configuration set : "ModelReferencing"
*** Working directory : "D:\SVN\SDE_Praktikum\MTR_SDE_Praktikum\Software\CaroloCupFahrzeug"
*** Initializing code generation
### Starting Simulink Coder build procedure for model: AKT
------------------------------------------------------------
RTI Build Error
Configuration Parameters dialog:
Specification of the Fixed-step size with 'auto' is not supported in this version of RTI.
TIP: For this option you can set a default value that applies to new models.
To do so, open the Model Explorer and edit the Configuration Preferences of
the Simulink Root model.
------------------------------------------------------------
*** Stopped RTI build procedure for model: AKT.
----------------------------------------------------------------------
Bedeutung
Der konkrete Buildfehler entsteht, weil die Schrittweite (Fixed-Step size) in Ihrem Modell nicht korrekt konfiguriert ist. MATLAB bietet hier eine Funktion "auto" - diese kann aber von Echtzeitsystemen wie der DS1104 nicht genutzt werden.
Behebung
Simulink-Subsystem in einer neuen Simulink-Blank-Modell kopieren
Jede einzelnen Block des Subsystem überprüfen
Und Modell neu builden
Empfehlung
Hierfür empfehlt das dSPACE-Support einen fixen Wert mit einer Schrittweite von 1ms (= 0.001).
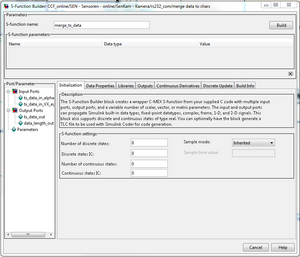
Nicht gebuildete S-Function
Bei Änderung bzw. Verlust der Dateien muss die S-Function immer neu gebuildet werden.
Behebung
Doppelklick auf der gewünchten S-Function
Klicken SIe auf Build
Klicken Sie auf für die Überschreibung bzw. Overwriting
Klicken SIe auf Close
Sie werden einen Status erhalten, ob die Bildung erfolgreich oder fehlhaft war.
Menu S-Function
Status der Funktionsbildung
Nicht definierte Variablen
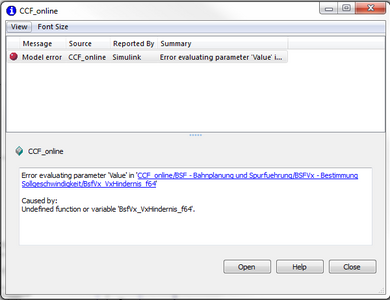
Error evaluating parameter 'Value' in 'CCF_online/BSF - Bahnplanung und Spurfuehrung/BSFVx - Bestimmung Sollgeschwindigkeit/BsfVx_VxHindernis_f64'
Bedeutung
Die Funktion oder die genannte Variable wurde nicht definiert.
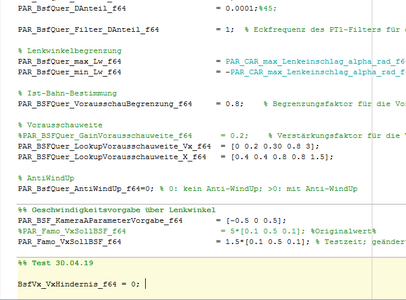
Wählen Sie die Parameterfile (*.m-File), wo die die Variable definiert wird,
in diesem Fall "param_BSF.m"
Initialisieren Sie die gewünchte Parameter
in diesem Fall "BsfVx_VxHindernis_f64"
Fehlermeldung
Achtung: Wenn diese Fehlermerdung häufig auftaucht, verifizieren Sie, ob die Verlinkung richtig gemacht wurde
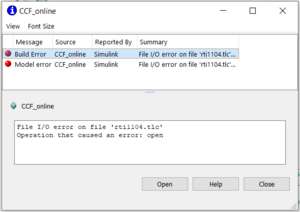
Verbindungsfehler zu der dSPACE-Karte
File I/O error on file 'rti1104.tlc'
Operation that caused an error: open
Umgang
Verifizieren Sie ob die dSPACE-Karte richtig angeschlossen ist.
Stellen Sie sich sicher, dass die dSPACE-MTLAB-Toolbox installiert ist.
Stellen Sie sicher, dass sie die richtige MATLAB-Version gestartet haben.
Warnings
Verlinkungswarnung
Warning: bib_Sensoren_Aktoren_online.mdl, line 5405:
"bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR nach Hinten/MATLAB Function"
is a parameterized link
To view, discard, or propagate the changes for this link,
use the "Library Link" menu item
Link: bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR nach Hinten
Warning: bib_Sensoren_Aktoren_online.mdl, line 5103: "bib_Sensoren_Aktoren_online/SEN
- Sensoren - online/SenAbs - Abstandssensorik/Infrarotsensor HR/MATLAB Function"
is a parameterized link. To view, discard, or propagate the changes for this
link, use the "Library Link" menu item
Link: bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs - Abstandssensorik/Infrarotsensor HR
Warning: bib_Sensoren_Aktoren_online.mdl, line 5707: "bib_Sensoren_Aktoren_online/SEN -
Sensoren - online/SenAbs - Abstandssensorik/Infrarotsensor VR/MATLAB Function"
is a parameterized link. To view, discard, or propagate
the changes for this link, use the "Library Link" menu item
Bedeutung
Diese Warnung taucht meistens vor dem Builden des Modell auf. Dies bedeutet, dass die Bibliothek im Modell nicht mehr mit dem Hyperlink überreinstimmen.
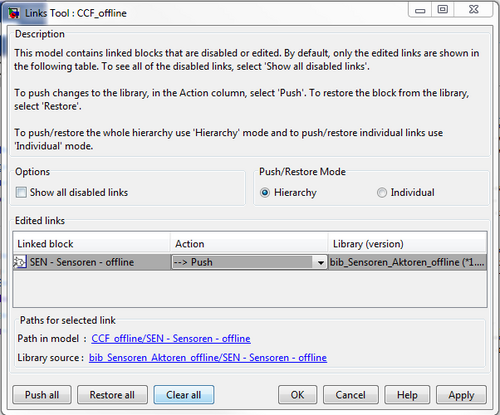
Umgang
Rechtsklick auf das Block
Wählen Sie „Library Link“
Klicken Sie auf „Resolve Link“. Ein Dialog-Fernster wird sich öffnen
Wählen SIe eine Aktion aus
Merke
Wählen Sie Push, wenn Sie wollen, dass die Änderungen in die Bibliothek übernommen werden.
Wählen SIe Restore, wenn Sie wollen, dass der Zustand aus der Bibliothek in das Model übernommen wird.
Warnings beim Start des Online Modell
Warning: CCF_online.mdl, line 1229: "CCF_online/AKT - Aktoren - online" is a parameterized link. To view, discard,
or propagate the changes for this link, use the "Library Link" menu item
In general\private\openmdl at 13
In open at 159
In start at 257
Warning: CCF_online.mdl, line 2312: "CCF_online/SEN - Sensoren - online" is a parameterized link.
To view, discard, or propagate the changes for this link, use the "Library Link" menu item
In general\private\openmdl at 13
In open at 159
In start at 257
Bedeutung
Die Warnings tauchen auf, weil Änderungen in das Modell vorgenommen würden und gepeichert worden sind.
Beim nächsten Start weißt MATLAB dem Programmierer darauf hin.
Umgang
Rechtsklick auf das Block
Wählen Sie „Library Link“
Klicken Sie auf „Resolve Link“. Ein Dialog-Fernster wird sich öffnen
Wählen SIe eine Aktion aus
Merke
Wählen Sie Push, wenn Sie wollen, dass die Änderungen in die Bibliothek übernommen werden.
Wählen SIe Restore, wenn Sie wollen, dass der Zustand aus der Bibliothek in das Model übernommen wird.
Warnung während des Builden des Modells
Warning: Remapping selected signal 'AEP.Famo_Modi_Schalter_Lw_int' to 'FAMO.Famo_Modi_Schalter_Lw_int'
in 'CCF_online/FAMO - Fahrtmodus/Bus Selector' to match the bus hierarchy. Please save your
model to make this change permanent
Umgang
Speichern Sie ihre Modell und builden Sie neu.
Debug des SEN - Online - Block
In diesem Abschnitt wird den Vorgang der Blockweise Debugging erläutert.
Öffnen und starten Sie die Datei Start.m
Builden Sie das Gesamt Modell
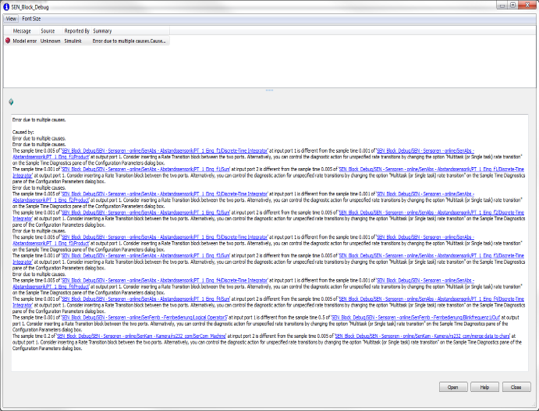
Taucht einen Fehler auf, muss dieser erst lokalisiert werden. Meistens wird der SIMULINK-Diagnostic Viewer eindeutig schreiben in welcher Block der Fehler liegt. Allerdings gibt es fälle, wo dies nicht angezeigt wird, deshalb sollte man dies Stück für Stück bzw. Block per Block suchen.
In dieser Abschnitt wird den Fehler das auto-FixedStep-Problem behandelt.
Isolieren Sie den Sensorblock.
Erstellen Sie einen neuen SIMULINK-Modell und kopieren Sie die Bibliothek rüber.
Machen Sie es für jeden Block, bis Sie den problematischen Block gefunden haben.
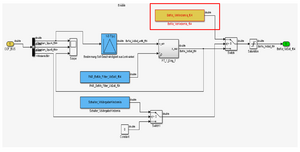
Untere Ebene des SEN-Blocks
Ergebnis nach einen Subsystem-Build
SenFernb - Fernbedienung - Block
Debuggen Sie nun den Block
Weitere Fehlermeldungen beim Debuging
Befindet man sich in der unterste Ebene, kann man mit dem Debuging anfangen. Beim Debugging kann es sein, dass noch mehreren Fehlern auftauchen. Diese sollten auch systematisch und sinnvoll behandelt werden.
Debuggen Sie und Builden Sie erneut bis das Gesamt Modell kompilierbar ist.
Speichern Sie und verlinken Sie die Bibliothek erneut gemäß [Abschnitt 3.5.2]
Situation am Ende des Sommersemester 2019
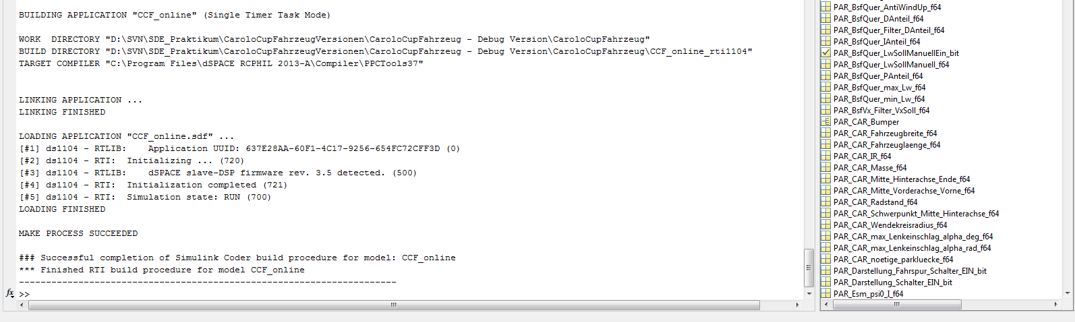
Am Ende des SoSe 2019 ist das Online-Modell kompilierbar und wurde bereits im SVN hochgeladen.
Erkenntnis
Das Gesamtmodell ist kompilierbar
Der SEN-, FAMO- und der AKT-Block enthalten noch Warnings beim bilden des Gesamtmodells
Der FAMO ist allein fehlerfrei kompilierbar. Das Warning taucht nur beim builden des Gesamtmodells auf
Die restlichen Blöcke sing fehlerfrei und enthalten keine Warnings
Das OSE-, BSF- und FAMO-Block können nun gebuildet werden, wenn die nicht verlinkt waren.
Die Fehler wurden bereits lokalisiert
Untere Ebene des SEN-Blocks
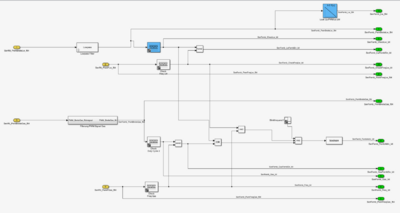
Untere Ebene des AKT-Blocks
Ein bereits debuggtes SEN-Block liegt in der Software Bibliothek des CaroloCup Fahrzeugs. Allerding gibt es probleme bei der Rückfürung mit der Parent.
Warnings sind sofort zu beseitigen beim Erstellen einer neuen Bibliothek!
Zusammenfassung und Ausblick
Aktuell lässt sich das Gesamt-Online-Modell kompilieren. Das Modell wurde in Labor PC und im Carolo Cup Fahrzeug getestet. Das Kompilieren war in beide Fälle erfolgreich.
Nichtsdestotrotz tauschen einige Warnings auf, die dazu führen dass einigen Blöcke rot markiert bleiben. Die Warnings-Ursachen sind schon bekannt. Für den Wintersemester 2019-2020 wird versucht die zu beseitigen.
Außerdem können der Datenfluss und die übergegebene Werte nicht korrekt sein. Da das Ziel war erst ein kompilierfähiges Modell bis Ende des Sommersemmester 2019 zu haben. Als nächstes wird das Gesamtteam sich um die Datensicherung kümmern, um ein korrektes und lauffähiges System zu bekommen.
























 Menu S-Function
Menu S-Function
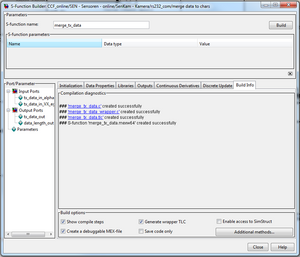 Status der Funktionsbildung
Status der Funktionsbildung






 Fehlermeldung
Fehlermeldung





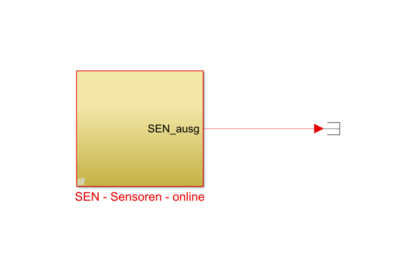


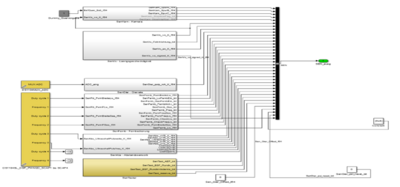 Untere Ebene des SEN-Blocks
Untere Ebene des SEN-Blocks
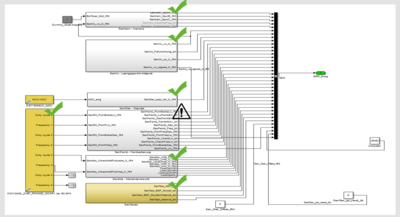 Ergebnis nach einen Subsystem-Build
Ergebnis nach einen Subsystem-Build
 SenFernb - Fernbedienung - Block
SenFernb - Fernbedienung - Block





 Untere Ebene des AKT-Blocks
Untere Ebene des AKT-Blocks