Kommunikation Hokuyo LiDAR: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 59: | Zeile 59: | ||
* Initialisieren Sie die gewünchte Parameter | * Initialisieren Sie die gewünchte Parameter | ||
in diesem Fall "BsfVx_VxHindernis_f64" | in diesem Fall "BsfVx_VxHindernis_f64" | ||
[[Datei:Verbindungsfehler_zu_dSPACE_Karte_isMP.png]] | |||
<gallery class="left" widths="500" heights="300"> | <gallery class="left" widths="500" heights="300"> | ||
Verbindungsfehler_zu_dSPACE_Karte_isMP.png | |||
</gallery> | </gallery> | ||
| Zeile 69: | Zeile 71: | ||
File I/O error on file 'rti1104.tlc' | File I/O error on file 'rti1104.tlc' | ||
Operation that caused an error: open | Operation that caused an error: open | ||
<gallery class="left" widths="500" heights="300"> | |||
Nicht_definierte_Variablen_ParameterFile_isMP.png | |||
</gallery> | |||
=== RS-232 Verbindung === | === RS-232 Verbindung === | ||
Version vom 18. Mai 2019, 14:13 Uhr
Autor: Isaac Mpidi Bita (Diskussion)
Meilenstein 1:
- Recherche der Toolkette des Vorgangssemester
- Hokuyo LiDAR via USB an PC (C-Quellcode, Visual Studio)
- Objektdatenverarbeitung analysieren und dokumentieren
- Überprüfung der vorliegende Dokumentation (ggf. Überarbeiten, aktualisieren)
- Einweisung über den Einsatz der dSPACE Karte an das Team
- Einsatz der dSPACE Karte durchführen, nicht lauffähige Projekt debuggen und lauffähig machen
- Diagnoseschnittstelle LiDAR in Control Desk (Objektliste, XY-Plotter)
Meilenstein 2:
- Überprüfung bidirektionale Verbindung PC via RS232 zu DS1104
- Aktualisierung des Schnittstellendokumentes
- Dokumentation als Signalflussplan
- Wiki Artikel zur bidirekionalen Verbindung
Verbindung Hokuyo LiDAR via USB
Debugging der Online Simulation
Error
Nicht gebuildete S-Function
Bei Änderung bzw. Verlust der Dateien muss die S-Function immer neu gebuildet werden.
Behebung
- Doppelklick auf der gewünchten S-Function
- Klicken SIe auf Build
- Klicken Sie auf für die Überschreibung bzw. Overwriting
- Klicken SIe auf Close
Sie werden einen Status erhalten, ob die Bildung erfolgreich oder fehlhaft war.
-
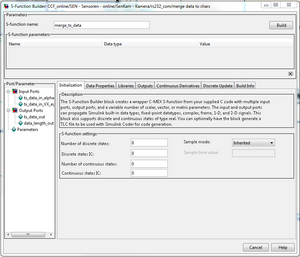 Menu S-Function
Menu S-Function -
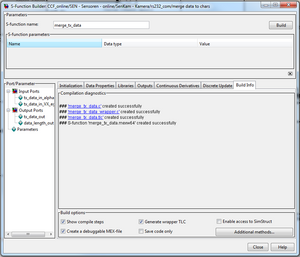 Status der Funktionsbildung
Status der Funktionsbildung


Nicht definierte Variablen
Error evaluating parameter 'Value' in 'CCF_online/BSF - Bahnplanung und Spurfuehrung/BSFVx - Bestimmung Sollgeschwindigkeit/BsfVx_VxHindernis_f64'
-
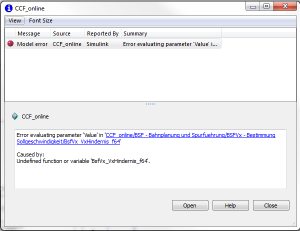 Fehlermeldung
Fehlermeldung -
 Fehler im Simulink-Modell
Fehler im Simulink-Modell


Bedeutung
Die Funktion oder die genannte Variable wurde nicht definiert.
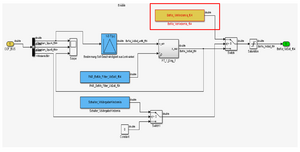
Behebung
Um den Fehlher zu beheben:
- Gehen Sie in der SVN-Ordner \Software\CaroloCupFahrzeug\parameter
- Wählen Sie die Parameterfile (*.m-File), wo die die Variable definiert wird,
in diesem Fall "param_BSF.m"
- Initialisieren Sie die gewünchte Parameter
in diesem Fall "BsfVx_VxHindernis_f64"

Achtung: Wenn diese Fehlermerdung häufig auftaucht, verifizieren Sie, ob die Verlinkung richtig gemacht wurde
Verbindungsfehler zu der dSPACE-Karte
File I/O error on file 'rti1104.tlc' Operation that caused an error: open

RS-232 Verbindung
Warnings
Verlinkungswarnung

Warning: bib_Sensoren_Aktoren_online.mdl, line 5405: "bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR nach Hinten/MATLAB Function" is a parameterized link
To view, discard, or propagate the changes for this link, use the "Library Link" menu item
Link: bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs - Abstandssensorik/Infrarotsensor HR nach Hinten
Warning: Warning: bib_Sensoren_Aktoren_online.mdl, line 5103: "bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor HR/MATLAB Function" is a parameterized link. To view, discard, or propagate the changes for this
link, use the "Library Link" menu item
Link: bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs - Abstandssensorik/Infrarotsensor HR
Warning: bib_Sensoren_Aktoren_online.mdl, line 5707: "bib_Sensoren_Aktoren_online/SEN - Sensoren - online/SenAbs -
Abstandssensorik/Infrarotsensor VR/MATLAB Function" is a parameterized link. To view, discard, or propagate
the changes for this link, use the "Library Link" menu item
Bedeutung
Umgang
- Rechtsklick auf das Block
- Wählen Sie „Library Link“
- Klicken Sie auf „Resolve Link“. Ein Dialoge Fernster wird sich öffnen
- Wählen SIe eine Aktion aus
Merke
- Wählen Sie Push, wenn Sie wollen, dass die Änderungen in die Bibliothek übernommen werden.
- Wählen SIe Restore, wenn Sie wollen, dass der Zustand aus der Bibliothek in das Model übernommen wird.