RoboSoccer Gruppe A7 - WS 17/18: Unterschied zwischen den Versionen
| Zeile 12: | Zeile 12: | ||
#*Der Roboter fährt dem Ball hinterher und fängt ihn, wenn dieser nah genug am Roboter liegt, mit der Ballfang & -Schussmechanik(Bild1 [4]), welcher von dem dritten Motor (Bild2 [3]) angesteuert wird. | #*Der Roboter fährt dem Ball hinterher und fängt ihn, wenn dieser nah genug am Roboter liegt, mit der Ballfang & -Schussmechanik(Bild1 [4]), welcher von dem dritten Motor (Bild2 [3]) angesteuert wird. | ||
#'''Ausrichtung''' | #'''Ausrichtung''' | ||
#*Sobald dann der | #*Sobald dann der Tastsensor 1(Bild2 [6]) vom Ball gedrückt wird, richtet sich R2Ddro mithilfe des NXT-Compass (Bild1 [7]) der Marke HiTechnic [http://modernroboticsinc.com/hitechnic-nxt-compass-sensor (NXT-Compass)] zum gegnerischen Tor aus und schießt dann auf das Tor. | ||
#*Falls die Ballfangmechanik mal den IR-Ball verfehlt hat, wird der | #*Falls die Ballfangmechanik mal den IR-Ball verfehlt hat, wird der Tastsensor 2 gedrückt und die Fangmechanik geht wieder auf. R2Ddro sucht nun weiter den Ball. | ||
Version vom 25. Januar 2018, 10:23 Uhr
Einleitung
Im Informatik-Praktikum I war es unsere Aufgabe einen funktionierenden Roboter mithilfe von LEGO Mindstorms zu konstruiren und mit Bricxcc zu programmieren. Die Aufgabe war in insgesamt sechs Praktikumsterminen (alle 14 Tage) umzusetzen.
Dieser Roboter soll dann an einem Robo-Soccer Tunier (Spielregeln) am 25.01.2018 an der Hochschule Hamm-Lippstadt in Lippstadt teilnehmen.
Unserer Roboter R2Ddro
- Namensgebung
- Unser Roboter trägt den Namen R2Ddro. Der kleine Bruder von R2D2. Er ist genau wie R2D2 mit vielen Hilfsmitteln und Werkzeugen (Sensoren) ausgestattet. Das Gehirn unseres Roboters ist der NXT-Brick welcher über eine Rechenleistung von 8 Bit verfügt und im Heck des R2Ddro verbaut ist.
- Ballsuche
- Unser R2Ddro bewegt sich wie sein Bruder auch auf drei rollenden Beinen (Bild1 [1]), wovon zwei dieser Beine von den leistungsstarken NXT-Servomotoren (Bild1 [2]) angetrieben werden.
- R2Ddro sucht den Infrarotball, welcher als Spielball eingesetzt wird, mit einem IR-Seeker(Bild2 [5]) der Marke HiTechnic (NXT-IRSeeker).
- Der Roboter fährt dem Ball hinterher und fängt ihn, wenn dieser nah genug am Roboter liegt, mit der Ballfang & -Schussmechanik(Bild1 [4]), welcher von dem dritten Motor (Bild2 [3]) angesteuert wird.
- Ausrichtung
- Sobald dann der Tastsensor 1(Bild2 [6]) vom Ball gedrückt wird, richtet sich R2Ddro mithilfe des NXT-Compass (Bild1 [7]) der Marke HiTechnic (NXT-Compass) zum gegnerischen Tor aus und schießt dann auf das Tor.
- Falls die Ballfangmechanik mal den IR-Ball verfehlt hat, wird der Tastsensor 2 gedrückt und die Fangmechanik geht wieder auf. R2Ddro sucht nun weiter den Ball.
Natürlich ist unser Roboter auch bemannt durch den Fahrzeugführer Klaus(Bild1 [9]).
-
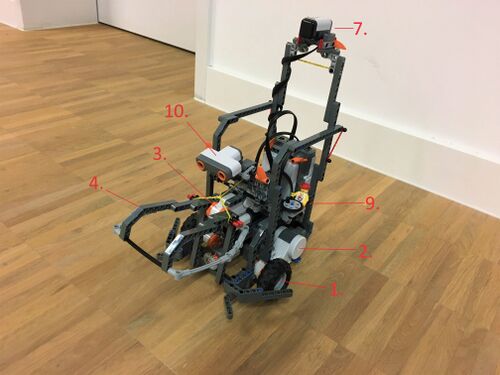 Bild1
Bild1 -
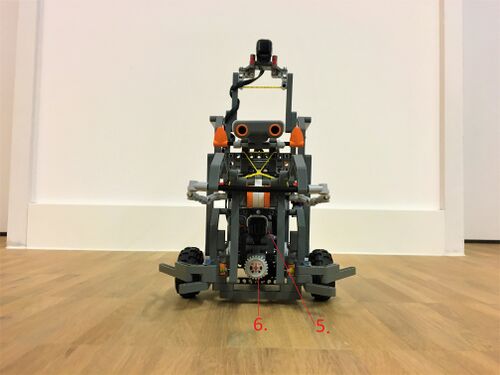 Bild2
Bild2


Besonderheiten des R2Ddro
R2Ddro besitzt viele Besonderheiten welche ihn bei dem Tunier am 25.01.2018 weit bringen wird.
Das sind unter anderem die Fähigkeiten:
- perfektionierte Fahrtwege
- agile Bewegung
- intelligentes Programm
- schnelle Ausrichtung
- RTP (ready to play) durch Kompasseinrichtung zu Spielbeginn (egal wie die Spielfeldausrichtung ist)
- zuverlässige Ballfang-&Schussmechanik
- Zusatzsensorik zur Erkennung von Ballfehlgriffen
Programm
- Programmablaufplan
-
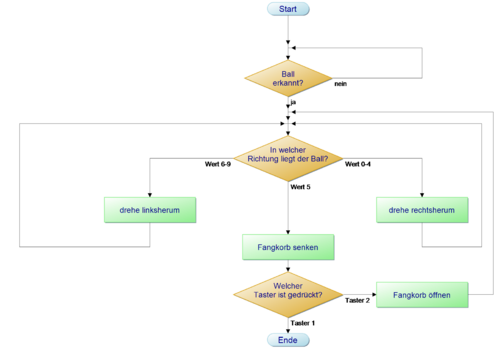
 PAP Hauptprogramm
PAP Hauptprogramm -
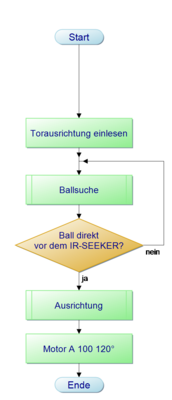
 Unterprogramm Ballsuche
Unterprogramm Ballsuche -
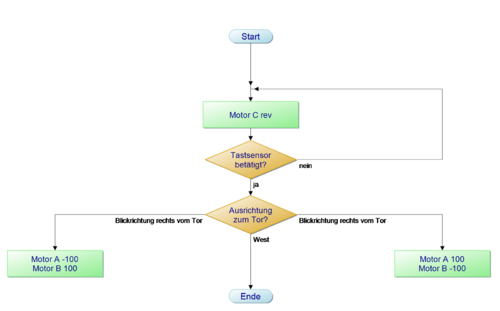 Unterprogramm Ausrichtung
Unterprogramm Ausrichtung



Im Programmablaufplan (PAP) sieht man unsere Spielstrategie, welche wir dann auch im Programm Bricx cc umgesetzt haben.
Im Bricx cc Programm wurde der Programmablaufplan umgesetzt und in einzelne tasks aufgeteilt, welche im main-Programm aufgerufen werden.
Weitere Bilder von R2Ddro
-
 Alles auf Anfang
Alles auf Anfang -
 Erste Versuche
Erste Versuche -
 Zwischenupdate
Zwischenupdate -
 Prototyp
Prototyp -
 Rückansicht
Rückansicht -
 Fertigstellung
Fertigstellung -
 Fertigstellung
Fertigstellung







Video
Damit R2Ddro auch zeigen kann was in ihm steckt, haben wir noch ein Video unter folgendem Link auf Youtube.com hochgeladen.
→ Video zum Roboter R2Ddro in Action
Gruppenmitglieder
- Alexander Hammelbeck
- Konstruktion des Roboters
- Erstellung der Bauanleitung
- Programmierung der Software
- Erstellung von Fotos
- René Katz
- Erstellung des Konzeptplans
- Konstruktion des Roboters
- Programmierung der Software
- Erstellung des Videos
- Leon Brölemann
- Erstellung der Bauanleitung
- Erstellung der Spielstrategie
- Programmierung der Software
- Erstellung des Programmablaufplans
Alle Gruppenmitglieder haben den gleichen Arbeitsaufwand geleistet!
Hinweise zum Artikel
Alle Fotos sind von uns selber gemacht und das Urheberrecht lieg bei René Katz, Alexander Hammelbeck und Leon Brölemann.
Weitere Bilder und der PAP befindet sich im SVN unter folgendem Link.
→ Link zum SVN mit den Dateien zur Abgabe: SVN Gruppe A7 (nur mit Zugriffsberechtigung)
→ zurück zum Hauptartikel: Informatikpraktikum WS 17/18