SDE WS25: berechneMittellinie.m: Unterschied zwischen den Versionen
| Zeile 31: | Zeile 31: | ||
= Komponentenspezifikation = | = Komponentenspezifikation = | ||
Der Punkt der Mittellinie wird berechnet. | |||
# | # Umrechnung der gemessenen Position der Mittellinie von Millimeter in Meter | ||
# | # Distanz Prisma - Infrarotsensoren = 65 mm bzw. 0.065 m | ||
# | # Punkt PA - Punkt der Mittellinie im Alphabot-Koordinatensystem aus Distanz vom Prisma zu den Sensoren und gemessener Position der Mittellinie erstellen | ||
# Homogene Koordinatentransformation des Punktes PA mit Rotationswinkel der Fahrtrichtung des Alphabot und aktuellem Standort des Prismas im W-Kos als Translationsvektor | |||
= Programmierung = | = Programmierung = | ||
Version vom 10. November 2025, 16:27 Uhr

| Modul: | berechneMittellinie.m
|
| Revision: | 10888 |
| Autor: | Lukas Berkemeier |
| Datum: | 28.10.2025 |
| System: | Mtlab R2024b |
| SVN-URL: | https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/c-files/berechneMittellinie.m
|
Einleitung/Funktion
Im Skript berechneMittellinie.m wird die Position der Mittellinie im Welt-Koordinatensystem berechnet um die reale Mittellinie auf der Fahrbahn darzustellen. Dazu wird die gemessene Position der Mittellinie aus SDE WS25: AP 1.6 Messung der Mittellinie vom Alphabot-Koordinatensystem in das Welt-Koordinatensystem transformiert. Die aktuelle Position des Prismas (PW) dient als Translationsvektor und der Winkel der Fahrtrichtung bzw. des Alphabot-Koordinatensystems zum Welt-Koordinatensystem dient als Rotationswinkel.
Funktionaler Systementwurf
Anforderungen
Die Anforderungen werden aus SDE WS25: AP 1.7 Berechnung der Mittellinienposition entnommen.
Technischer Systementwurf
Der Systementwurf entspricht dem Modulentwurf aus Abbildung 2.
-
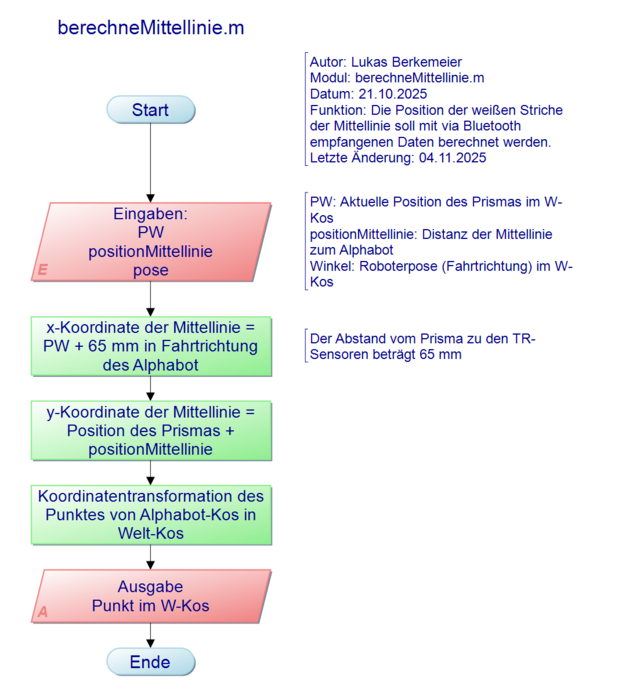 Abb. 2: messeMittellinie.ino
Abb. 2: messeMittellinie.ino

Komponentenspezifikation
Der Punkt der Mittellinie wird berechnet.
- Umrechnung der gemessenen Position der Mittellinie von Millimeter in Meter
- Distanz Prisma - Infrarotsensoren = 65 mm bzw. 0.065 m
- Punkt PA - Punkt der Mittellinie im Alphabot-Koordinatensystem aus Distanz vom Prisma zu den Sensoren und gemessener Position der Mittellinie erstellen
- Homogene Koordinatentransformation des Punktes PA mit Rotationswinkel der Fahrtrichtung des Alphabot und aktuellem Standort des Prismas im W-Kos als Translationsvektor
Programmierung
berechneMittellinie.m
|
% PW - aktueller Standort des Prismas im W-Kos
% positionMittellinie - Distanz der weißen Linie zur x-Achse des Alphabot
% Winkel - Winkel der Fahrtrichtung des Alphabot im W-Kos
% PWLinie - Punkt der Mittellinie im W-Kos
function [PWLinie] = berechneMittellinie(PW, positionMittellinie, Winkel)
positionMittellinie = positionMittellinie/1000; % Distanz in Meter berechnen
distanzPrismaSensor = 0.065; % Distanz des Prismas zum mittleren Infrarotsensor in Meter
% Messpunkt im Alphabot-Koordinatensystem A-Kos
PA = [distanzPrismaSensor; positionMittellinie; 0; 0];
%% Koordinatentransformation A-Kos in W-Kos
% Rotationswinkel = Pose
% homogene Transformationsmatrix
D = [cosd(Winkel) -sind(Winkel) 0 0;...
sind(Winkel) cosd(Winkel) 0 0;...
0 0 1 0; ...
0 0 0 1];
% homogene KOS-Trafo A-Kos zu W-Kos
PWLinie = D * PA + [PW(1);PW(2); 0; 0];
%% Ausgabe Punkt der Mittellinie im W-Kos
PWLinie = PWLinie(1:3);
end
|
Modultest
Da es sich bei dieser Entwicklung um die eines einzelnen Moduls handelt, schließt der Modultest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 2). Zum Testen des Moduls wird das Modul messeMittellinie.ino genutzt, indem die Werte zur Messung der Mittellinie im seriellen Monitor ausgegeben und mit der realen Messung verglichen werden.
Systematisches Vorgehen beim Testen:
- Arduino des Alphabot mit USB-Kabel an einen PC anschließen
- Arduino IDE starten
messeMittellinie.inoöffnen- COM-Port des Alphabot auswählen
- Programm auf den Arduino des Alphabot hochladen
- Seriellen Monitor starten
- Sensoren kalibrieren
- Ausgegebene Werte mit realen Messwerten vergleichen
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Messung: Alphabot zentral auf der weißen Linie (0 mm)  |
Messwertarray der TR-Sensoren
[58 85 952 61 60] |
0 mm | 1 mm | Lukas Berkemeier | 13.10.2025 |
| 2 | Messung: Alphabot rechts von der weißen Linie (24 mm) am festgelegten Ende  |
Messwertarray der TR-Sensoren
[215 861 39 36 20] |
24 mm | 24 mm | Lukas Berkemeier | 13.10.2025 |
| 3 | Messung: Alphabot links von der weißen Linie (-24 mm) am festgelegten Ende  |
Messwertarray der TR-Sensoren
[99 73 73 473 787] |
-24 mm | -23 mm | Lukas Berkemeier | 13.10.2025 |
| 4 | Keine weiße Linie vorhanden oder Linie außerhalb der festgelegten Spannweite | Positionswert <800 oder >3200 | 50 | 50 | Lukas Berkemeier | 13.10.2025 |
Fehlerbehebung

Nach der ersten Modulplanung sollte die Spannweite wie in Abbildung 5 von beiden äußeren Sensoren zentral über der Mitte der Mittellinie, mit 65 mm Spannweite genutzt werden. Mit der Funktion map() wurden den Positionswerten 350-3650 die Entfernungen 33 bis -33 mm zugewiesen. Bei dieser Spannweite kam es im Bereich der äußeren Sensoren immer zu Messungenauigkeiten.
Zur Fehlerbehebung wurde die Spannweite auf 48 mm (+-24 mm) verringert und den Positionswerten 800-3200 die Entfernungen 24 bis -24 mm zugewiesen.
Im Modultest wurden die Änderungen als passend bewiesen.
Eine weitere Fehlerursache ist die Kalibrierung bzw. die Beleuchtung der Sensoren. Je nach Beleuchtung können verschiedene Werte gemessen werden. Ein möglicher Schritt zur Fehlerbehebung wäre das Anbringen einer Beleuchtung für die Sensoren um die Beleuchtung möglichst konstant zu halten.
Zusammenfassung
Das Modul messeMittellinie.ino wurde systematisch entworfen, getestet und dokumentiert. Sämtliche Anforderungen aus dem Arbeitspaket SDE WS25: AP 1.6 Messung der Mittellinie wurden erfüllt. Die Funktion kann eingesetzt werden, um die Distanz der Mitte der Mittellinie zum zentralen Sensor des Alphabot zu berechnen. In Zukunft kann das Modul verwendet werden um die Positionen der realen Mittellinienstreifen der Fahrbahn zu bestimmen.