Gewichtsgeregelte Flüssigkeitsdosierung: Unterschied zwischen den Versionen
| Zeile 142: | Zeile 142: | ||
Das Messsignal wird als Digitalwert empfangen. Nach korrekter Kalibrierung des Gewichtssensors, kann aus dem Digitalwert ein Gewicht abgeleitet werden. <br /> | Das Messsignal wird als Digitalwert empfangen. Nach korrekter Kalibrierung des Gewichtssensors, kann aus dem Digitalwert ein Gewicht abgeleitet werden. <br /> | ||
Der verwendete P-Regler regelt den Füllvorgang des Behälters, indem er das Fördervolumen der Pumpe steuert. Das Füllen des Behälters entspricht einem System mit I-Verhalten und bildet unsere Regelstrecke. <br /> Bei der Peristaltikpumpe handelt es sich um einen Stepmotor, welcher mittels Pulsweitenmodulation (kurz: PWM) angesteuert wird. <br /> | Der verwendete P-Regler regelt den Füllvorgang des Behälters, indem er das Fördervolumen der Pumpe steuert. Das Füllen des Behälters entspricht einem System mit I-Verhalten und bildet unsere Regelstrecke. <br /> Bei der Peristaltikpumpe handelt es sich um einen Stepmotor, welcher mittels Pulsweitenmodulation (kurz: PWM) angesteuert wird. <br /> | ||
Aus diesen Komponenten lässt sich dann folgender Regelkreis zur Regelung des Gesamtsystems erstellen: | Aus diesen Komponenten lässt sich dann folgender Regelkreis zur Regelung des Gesamtsystems erstellen und umsetzen: | ||
Version vom 30. Dezember 2023, 16:37 Uhr
Autor: Asmaa Kachout Aarourou & Daniel Gosedopp & Florian Pichmann
Betreuer: Marc Ebmeyer
Einleitung
Im Studiengang Business and Systems Engineering wird im Rahmen des Fachpraktikums "Angewandte Elektrotechnik" ein Gruppenprojekt entwickelt.
Dieses Projekt befasst sich mit einer gewichtsgeregelten Flüssigkeitsdosierung, die für Anwendungen mit grammgenauen Gewichtsanforderungen verwendet werden kann. Als Beispiel kann hier die Chemieindustrie bei der Abfüllung von Reinigungs-/Pflegeprodukten oder das Mixen von Nährstofflösungen für Pflanzen genannt werden. Auch der Einsatz in Schulen zur Durchführung von Experimenten mit Flüssigkeiten ist möglich.
Der Automat soll eine gewünschte Flüssigkeitsmenge mittels einer Pumpe und Schlauchverbindungen aus einem Tank in ein bereitstehendes Gefäß einfüllen. Die Sollmengenvorgabe wird mit einem Touchscreen realisiert. Hier kann entweder direkt das Gewicht oder die bekannte Dichte der Flüssigkeit zusammen mit dem gewünschten Volumen in z.B. Milliliter vorgegeben werden. Der Regelkreis wird mithilfe einer Wägezelle als Sensor, auf der das Zielbehältnis platziert wird, und einer Peristaltikpumpe (Schlauchpumpe) als Aktuator realisiert. Die Software (Signalverarbeitung, Regler) läuft auf einem Mikrocontroller. Die Vorgehensweise bei der Bearbeitung des Projekts orientiert sich am V-Modell, weshalb auch dieser Wiki-Artikel in die Phasen des V-Modells bis zum Komponententest gegliedert ist.
Insgesamt besteht das Projekt aus den drei Hauptteilen Hardwareaufbau, Software für Signalverarbeitung und Regler sowie Software für das Touchdisplay. Die Arbeitsaufteilung innerhalb der Gruppe erfolgt an diesen Teilen.
Anforderungen
| ID | Typ (I = Info, A = Anforderung) | Kapitel | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|---|
| 001 | I | 1 | Hardware | ||||
| 002 | A | Es muss eine Wägezelle verbaut werden, welche in der Lage ist, die Flüssigkeitsmenge mit einer Genauigkeit von +/- 1g zu messen. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 003 | A | Es wird eine regelbare Peristaltikpumpe (Schlauchpumpe) verbaut. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 004 | A | Zur Sollwertvorgabe wird ein Touchdisplay verwendet (HMI). Hier kann entweder ein gewünschtes Gewicht oder die Dichte der Flüssigkeit zusammen mit dem gewünschten Volumen angegeben werden. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 005 | A | Für die Daten- und Signalverarbeitung, die Regelung und die Anbindung des Touchdisplays wird ein Arduino Mikrocontroller genutzt. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 006 | A | Es müssen zwei Behälter (z.B. Becherglas) vorhanden sein. Einer dient als Vorrat, der Andere als Zielgefäß. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 007 | A | Der Transport der Flüssigkeit zwischen den Behältern erfolgt durch Kunststoffschlauchverbindungen. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 008 | A | Die Energieversorgung wird von einem externen Netzteil übernommen. Dieses muss genug Leistung haben, um die gesamte Elektronik zu betreiben. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 009 | I | 2 | Software | ||||
| 010 | A | Für die Erstellung der Software wird Matlab/Simulink verwendet. Ggf. wird aus dem Modell C-Code generiert, welcher auf den Arduino geflasht wird. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 011 | A | Die Software muss die Eingabe auf dem Touchdisplay zu einem Sollwert für die Regelung verarbeiten. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 012 | A | Es muss ein Kalibriermodus für die Wägezelle vorhanden sein. Die Kalibrierung wird ebenfalls mit Hilfe des Touchscreens vorgenommen. Hierzu ist ein Kalibriergewicht notwendig. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 013 | A | Das gemessene Ist-Gewicht wird mit dem Sollwert zu einer Regeldifferenz verrechnet, sodass der Regler eine Stellgröße zur Ansteuerung der Pumpe berechnen kann. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 014 | A | Es wird ein stetiger Regler verwendet. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 015 | I | 3 | Dokumentation | ||||
| 016 | A | Alle Projektdateien werden in SVN hinterlegt. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 017 | A | Das gesamte Projekt wird im Wiki dokumentiert. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 |
| Anzahl | Komponente | Preis |
|---|---|---|
| 1 | Kamoer KCM Peristaltikpumpe | 50,38€ |
| 1 | Arduino Mega 2560 | 15,95€ |
| 1 | Wägezelle RBS15855 | 1,95€ |
| 1 | HX711 24 Bit ADU | 0,89€ |
| 1 | Touchdisplay | € |
| 2m | Silikonschlauch 3,2mm * 6,4mm | 9,49€ |
Funktionaler Systementwurf/Technischer Systementwurf
-
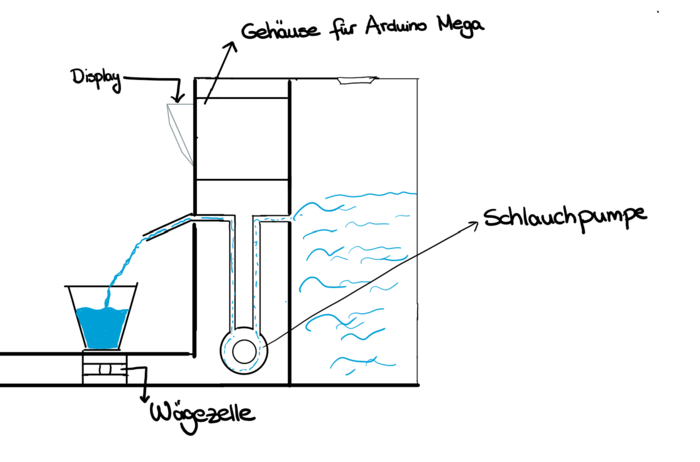
Abbildung 1: Skizze funktionaler Systementwurf

-
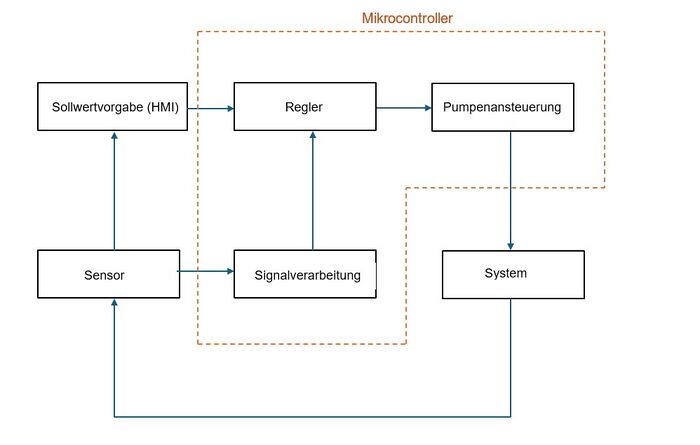
Abbildung 2: Skizze technischer Systementwurf

Komponentenspezifikation
Umsetzung (HW/SW)
Hardware
Die Umsetzung der Hardware umfasst die Verkabelung und Verlötung der elektrischen Komponenten, sowie die Entwicklung eines Gehäuses, worin die Komponenten untergebracht werden können.
Für das Gehäuse wurde zunächst mittels CAD-Software ein 3D-Modell entworfen, worin auch die einzelnen Komponenten mit deren Abmessungen berücksichtigt wurden. Dadurch konnten die Anordnung der Komponenten und entsprechende Größen einzelner Bauteile bestimmt werden. Durch den benötigten Bauraum stellte sich heraus, dass ein Gehäuse aus Holz sehr gut Umsetzbar ist. In diesem befinden sich dann die Peristaltikpumpe, der ArduinoMega, ein Netzteil zur Spannungsversorgung, ein Spannungswandler, ein Treibermodul für die Pumpe und ein 24bit-Analog-Digital-Umwandler, welcher das Messsignal der Wägezelle verarbeitet. Die Wägezelle selbst wird vor dem Gehäuse montiert. Diese benötigt Abstand zum festen Untergrund und zu dem "Wiegeteller", auf dem das Gefäß, in dem die Flüssigkeit gewogen wird, abgestellt werden kann. Durch diese Montageweise ist gewährleistet, dass sich die Wägezelle durch die erzeugte Gewichtskraft verformen kann und die Dehnungsmessstreifen eine elektrische Spannung erzeugen. Das HMI zur Eingabe der Flüssigkeitsdosierung wird auf dem Gehäuse montiert, um es einfach bedienen zu können.
Neben dem Gehäuse aus Holz wurden weitere Bauteile aus Kunststoff mittels dem Fused Deposition Modelling (FDM) Verfahren gefertigt, welche hauptsächlich die Funktion haben, einzelne Komponenten in Position zu halten.
Folgende Bauteile wurden per FDM gefertigt und verbaut:
- Aufnahme für das HMI (Deckel des Gehäuses)
- 2 Ausgüsse mit Schlauchdurchführung, inkl. 2 Halter für die Ausgüsse
- Halterung für das Netzteil
- Halterung für die Peristaltikpumpe
- Wiegeteller
In den folgenden Abbildungen ist links das 3D-Modell und rechts die Umsetzung dessen in die Realität zu sehen:
EINFÜGEN
Die elektrische Verbindung von HMI zu dem ArduinoMega erfolgt über ein Flachbandkabel. Der Arduino selbst ist so im Gehäuse montiert, dass seine USB-Schnittstelle für eventuelle Änderungen gut zugänglich ist. Alle Verkabelungen, welche vom Arduino abgehen, sowie die Verbindungen am Spannungswandler sind fest verlötet. Die restlichen Verbindungen sind steckbar.
In folgender Abbildung ist der Verdrahtungsplan zu sehen:
EINFÜGEN
Software
Die Umsetzung der Software wird auf dem Mikrocontroller ArduinoMega mittels der Mathworks Software Simulink realisiert. Sie besteht aus vier wesentlichen Bestandteilen:
- Darstellung und Funktionen des Touchdisplays
- Messsignalverarbeitung
- Regler
- Pumpenansteuerung
Für die Programmierung des Displays sind verschiedene Bibliotheken erforderlich, welche zum Beispiel Funktionen für Buttons und deren Darstellung beinhalten, worüber dann unter Anderem Sollwerte vorgegeben und eine Kalibrierung durchgeführt werden können.
Das Messsignal wird als Digitalwert empfangen. Nach korrekter Kalibrierung des Gewichtssensors, kann aus dem Digitalwert ein Gewicht abgeleitet werden.
Der verwendete P-Regler regelt den Füllvorgang des Behälters, indem er das Fördervolumen der Pumpe steuert. Das Füllen des Behälters entspricht einem System mit I-Verhalten und bildet unsere Regelstrecke.
Bei der Peristaltikpumpe handelt es sich um einen Stepmotor, welcher mittels Pulsweitenmodulation (kurz: PWM) angesteuert wird.
Aus diesen Komponenten lässt sich dann folgender Regelkreis zur Regelung des Gesamtsystems erstellen und umsetzen:
EINFÜGEN Screenshots
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan

Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)