Dosenautomat: Unterschied zwischen den Versionen
| Zeile 138: | Zeile 138: | ||
| 16|| Verbrauchsmaterial || Montageband || [[Datei:Montageband_DAM.jpg|150px|rahmenlos]] || <small><small>https://www.hornbach.de/p/pattex-montageband-superstark-weiss-19-mm-x-1-5-m/10401735/</small></small> || 6,89€ | | 16|| Verbrauchsmaterial || Montageband || [[Datei:Montageband_DAM.jpg|150px|rahmenlos]] || <small><small>https://www.hornbach.de/p/pattex-montageband-superstark-weiss-19-mm-x-1-5-m/10401735/</small></small> || 6,89€ | ||
|- | |- | ||
| 17|| Netzstecker Kaltgerätestecker|| INTOS ELECTRONIC InLine Netzkabel (Schutzkontakt gerade auf C13 Kaltgerätestecker | Länge: 1,80m) - in schwarz || [[Datei: | | 17|| Netzstecker Kaltgerätestecker|| INTOS ELECTRONIC InLine Netzkabel (Schutzkontakt gerade auf C13 Kaltgerätestecker | Länge: 1,80m) - in schwarz || [[Datei:Netzstecke_C13_EU_DAM.jpg|150px|rahmenlos]]|| <small><small>https://www.conrad.de/de/p/intos-electronic-inline-netzkabel-schutzkontakt-gerade-auf-c13-kaltgeraetestecker-laenge-1-80m-in-schwarz-800403474.html</small></small> || 3,39€ | ||
|- | |- | ||
| 18|| Jumper / Dupont Kabel Set|| 40pin Jumper / Dupont Kabel Set, je 1x F-F / M-M / F-M, 20cm || [[Datei:jumper_kabel.jpg|150px|rahmenlos]]|| <small><small>https://www.conrad.de/de/p/40pin-jumper-dupont-kabel-set-je-1x-f-f-m-m-f-m-20cm-817296700.html</small></small> || 5,38€ | | 18|| Jumper / Dupont Kabel Set|| 40pin Jumper / Dupont Kabel Set, je 1x F-F / M-M / F-M, 20cm || [[Datei:jumper_kabel.jpg|150px|rahmenlos]]|| <small><small>https://www.conrad.de/de/p/40pin-jumper-dupont-kabel-set-je-1x-f-f-m-m-f-m-20cm-817296700.html</small></small> || 5,38€ | ||
Version vom 3. Dezember 2023, 13:15 Uhr
Autor: Bartos Schwichtenberg & Berta Nissen
Betreuer: Marc Ebmeyer
Einleitung
Das Projekt befasst sich mit der Entwicklung eines "Dosenautomaten mit Dreifachauswahl" im Rahmen des Studiengangs Ba. Mechatronik im 5. Semester. Dieser innovative Automat zeichnet sich durch drei wesentliche Komponenten aus: 1. drei Aktuatoren (Motoren zur Fachauswahl), 2. Sensorik Nr. 1 (Tasteneingabe durch Benutzer), 3. Sensorik Nr. 2 (Beleuchtung für Fachentnahme). Das System funktioniert mit einem(r) Chip/Chipkarte ohne Guthaben und soll der Benutzers erkannt werden. Nach Erkennen wird das Bedienfeld entsperrt. Die Artikelwahl erfolgt über das Bedienfeld des Automaten. Jede Taste ist nur einem Servo zugewiesen und dieser Servo ist nur einem Artikelplatz. Eine Beleuchtung im Ausgabeschacht gibt dem Benutzer den Hinweis, den Artikel aus dem Schacht zu nehmen.
Anforderungen
| ID | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|
| 1 | Das Chiplesegerät muss den Chip/Chipkarte erkennen und das Bedienfeld des Automaten entsperren (Benutzererkennung). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 2 | Das LCD-Display muss Bereitschaftsbetrieb anzeigen (Begrüßung). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 3 | Die Taste 1 steuert nur den Servo 1 an (Artikel von Platz 1). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 4 | Die Taste 2 steuert nur den Servo 2 an (Artikel von Platz 2). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 5 | Die Taste 3 steuert nur den Servo 3 an (Artikel von Platz 3). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 6 | Servo 1 muss zwischen 0° und 90° schwenken (wird vorerst angenommen). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 7 | Servo 2 muss zwischen 0° und 90° schwenken (wird vorerst angenommen). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 8 | Servo 3 muss zwischen 0° und 90° schwenken (wird vorerst angenommen). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
| 9 | Beleuchtung im Schacht aufblinken/aufleuchten (bis der Artikel entnommen ist). | Bartos Schwichtenberg | 11.10.2023 | --- | **.10.2023 |
Funktionaler Systementwurf/Technischer Systementwurf
|
|


Komponentenspezifikation



















Umsetzung (HW/SW)
Gehäuse
Die Abbildung 4a, 4b, 5a und 5b zeigt das Gehäuse. Es ist aus Holzplatten zusammen geleimt und verschraubt. Als Schutz dient auf der Vorderseite eine Plexiglasscheibe. Zur einfachen Auffüllung ist auf der Rückseite ein Eingabefach. Die Steuerung der Aktuatoren, Sensoren, Mikrokontroller ist im Gehäuse eingebaut. Die Bedienelektronik befindet sich auf der Vorderseite des Geräts.
 |
 |
 |
 |
Schaltung
Zum Einsatz kommt der Mikrokontroller.
|
|

Regelstrecke
-
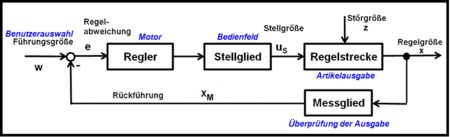 Abb. 7 Regelstrecke
Abb. 7 Regelstrecke

Programmcode
Es wird ein Code in auf den Mikrocontroller geschrieben.
-
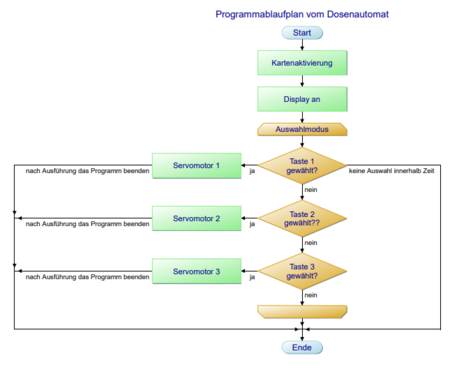 Abb. 8 Programmablaufplan (wird noch mit LCD-Ausgabe ergänzt).
Abb. 8 Programmablaufplan (wird noch mit LCD-Ausgabe ergänzt).

{kind=link}
Programmcode in Bearbeitung.
|
|
Komponententest
| ID | Inhalt | Getestet von | Datum |
|---|---|---|---|
| 1 | Der Automat muss mit 5V und 12V Spannung versorgt werden. | noch offen | **.**.2023 |
| 2 | Die LED soll aufleuchten, damt die Spannungsversorgung angezeigt wird. | noch offen | **.**.2023 |
| 3 | LCD-Display muss aufleuchten und vorgegebenen Text ausgeben. | noch offen | **.**.2023 |
| 4 | Chiplesegerät muss den korrekten Chip erkennen. | noch offen | **.**.2023 |
| 5 | LCD-Display zeigt die Auswahlbereitschaft an. | noch offen | **.**.2023 |
| 6 | Durch Tastenauswahl muss tastenabhöngig der richtige Motor (Servo) angesteuert werden. | noch offen | **.**.2023 |
| 7 | Informierung des Benutzer zur Entnehmung der Ware (LED). | noch offen | **.**.2023 |
Tabelle 3 zeigt, welche Anforderung vom welchen Bearbeiter getestet wurde. (in Bearbeitung)
Ergebnis
Platzhalter für den Artikel "Ergebnise"
Zusammenfassung
Platzhalter für den Artikel "Zusammenfassung"
Lessons Learned
Platzhalter für den Artikel "Lessons Learned" (wird stätig ergänzt und im Projektanschluss zum Text formatiert)
- Wir haben gelernt, das man mit einer besser koordenierten Vorbereitung, Herangehensweise an ein Projekt, schneller und erfolgreicher ist.
Projektunterlagen
Projektplan
Platzhalter für den Artikel "Projektplan"
Projektdurchführung
Platzhalter für den Artikel "Projektdurchführung"
YouTube Video
Platzhalter für den Artikel "YouTube Video"
Weblinks / Grafiklinks
Grafiken von Weblinks:
- Platzhalter für den Artikel "Weblinks"
Grafiken von Materiallinks:
- https://amzn.eu/d/4NuWy0d
- https://www.conrad.de/de/p/az-delivery-hd44780-1602-lcd-modul-display-bundle-mit-i2c-schnittstelle-2x16-zeichen-mit-gruenem-hintergrund-854720767.html
- https://www.ebay.de/itm/403572412958?mkcid=16&mkevt=1&mkrid=707-127634-2357-0&ssspo=othh7_s5qtq&sssrc=4429486&ssuid=x3WGzMX3Tbu&var=673533160861&widget_ver=artemis&media=COPY
- https://www.conrad.de/de/p/xilence-xp400r6-pc-netzteil-400w-peak-power-atx-2892733.html#productTechData
- https://funduinoshop.com/elektronische-module/sonstige/peltierelemente/kuehler-inkl-luefter-fuer-peltierelement-kuehlsystem-kit-90mm
- https://www.conrad.de/de/p/az-delivery-rfid-kit-rc522-mit-reader-chip-und-card-fuer-raspberry-pi-und-co-13-56mhz-850038438.html
- https://www.ebay.de/itm/403574423895?mkcid=16&mkevt=1&mkrid=707-127634-2357-0&ssspo=othh7_s5qtq&sssrc=4429486&ssuid=x3WGzMX3Tbu&var=673534476888&widget_ver=artemis&media=COPY
- https://www.hornbach.de/p/hobbyglas-2x500x1000-mm-glatt-klar/1477812/
- https://www.conrad.de/de/p/kaiser-753-sw-kaltgeraete-steckverbinder-753-stecker-einbau-vertikal-gesamtpolzahl-2-pe-10-a-schwarz-1-st-612545.html
- https://www.hornbach.de/p/osb3-platte-mini-ungeschliffen-1250x625x15-mm/10587891/
- https://www.hornbach.de/p/heco-topix-plus-holzschraube-senkkopf-mit-fraestaschen-tx-teilgewinde-4-5x35-mm-edelstahl-a2-200-stueck/10434659/?searchTerm=HECO-TOPIX-plus+Holzschraube+Senkkopf+mit+Fr%C3%A4staschen+TX+Teilgewinde+4%2C5x35+mm+Edelstahl+A2
- https://www.hornbach.de/p/mantelleitung-nym-j-5x25-mm-grau-meterware/6471650/
- https://www.conrad.de/de/p/logilink-loetdraht-o-1-mm-bleifrei-0-7-kupfer-12-5g-spenderbox-808011504.html
- https://www.hornbach.de/p/steinel-schrumpfschlauch-set-iii-4-0-12-0-mm-20-stueck/7631923/
- https://www.hornbach.de/p/schmales-scharnier-50x30-mm-edelstahl-matt-10-stueck/5863118/
- https://www.hornbach.de/p/pattex-montageband-superstark-weiss-19-mm-x-1-5-m/10401735/
- https://www.conrad.de/de/p/intos-electronic-inline-netzkabel-schutzkontakt-gerade-auf-c13-kaltgeraetestecker-laenge-1-80m-in-schwarz-800403474.html
- https://www.hornbach.de/p/pattex-montageband-superstark-weiss-19-mm-x-1-5-m/10401735/
- https://www.conrad.de/de/p/startech-com-80mm-gehaeuseluefter-luefter-8cm-fuer-pc-gehaeuse-mit-3-pin-molex-stecker-80mmx80mmx25mm-806138943.html
Literatur
Platzhalter für den Artikel "Literatur"
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)