Weizen Eingießanlage: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 7: | Zeile 7: | ||
== Einleitung == | == Einleitung == | ||
Dieser Artikel beschreibt den Aufbau und die Funktion einer Weizen-Eingießanlage. Hierbei gibt es eine Vorrichtung für die Flasche und eine für ein Glas. Diese werden in einem bestimmten Winkel so verfahren, dass immer ein optimal eingegossenes Weizen entsteht. Der Winkel zwischen Flasche und Glas wird durch einen Kraftsensor geregelt, der den Füllstand des Glasses bestimmt. | |||
== Anforderungen == | == Anforderungen == | ||
| Zeile 20: | Zeile 21: | ||
|- | |- | ||
| 1 | | 1 | ||
| | | Halterungen zeichnen und fertigen | ||
| Hardware | | Hardware | ||
| noch offen | | noch offen | ||
|- | |- | ||
| 2 | | 2 | ||
| | | Mechanik konstruieren und einbauen | ||
| Hardware | | Hardware | ||
| noch offen | | noch offen | ||
|- | |- | ||
| 3 | | 3 | ||
| | | Elektrik einbauen und verkabeln | ||
| | | Hardware | ||
| noch offen | | noch offen | ||
|- | |- | ||
| 4 | | 4 | ||
| | | Regelung des Kraftsensors | ||
| Software | | Software | ||
| noch offen | | noch offen | ||
|- | |- | ||
| 5 | | 5 | ||
| Regler | | Motoren Ansteuerung mittels Regler | ||
| Software | | Software | ||
| noch offen | | noch offen | ||
|- | |- | ||
|} | |} | ||
Version vom 6. Oktober 2023, 15:22 Uhr
Autor: Paul Janzen, Bastian Hannappel
Betreuer: noch offen
Einleitung
Dieser Artikel beschreibt den Aufbau und die Funktion einer Weizen-Eingießanlage. Hierbei gibt es eine Vorrichtung für die Flasche und eine für ein Glas. Diese werden in einem bestimmten Winkel so verfahren, dass immer ein optimal eingegossenes Weizen entsteht. Der Winkel zwischen Flasche und Glas wird durch einen Kraftsensor geregelt, der den Füllstand des Glasses bestimmt.
Anforderungen
| Nr. | Beschreibung | Bereich | Zuständig |
|---|---|---|---|
| 1 | Halterungen zeichnen und fertigen | Hardware | noch offen |
| 2 | Mechanik konstruieren und einbauen | Hardware | noch offen |
| 3 | Elektrik einbauen und verkabeln | Hardware | noch offen |
| 4 | Regelung des Kraftsensors | Software | noch offen |
| 5 | Motoren Ansteuerung mittels Regler | Software | noch offen |
Funktionaler Systementwurf/Technischer Systementwurf
Im folgenden Systementwurf wird das Projekt in Systemkomponenten unterteilt:
- Arduino: Programmiert mit Matlab Simulink.
- Motor/Schwungrad: Steuerung des Motors bzw des Schwungrads
- Gyroskop: Positionsabfrage mittels eines Gyroskops
- Regler: Regler zur Senkrechtstellung
-
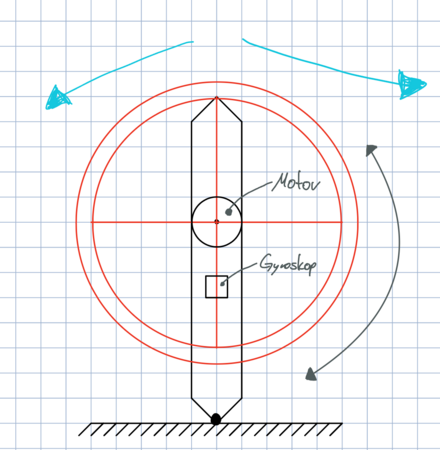 Funktionaler Systementwurf - Skizze
Funktionaler Systementwurf - Skizze

Komponentenspezifikation
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)