Selbstregelndes Schwungrad: Unterschied zwischen den Versionen
K Rechtschreibfehler behoben |
Systemkomponenten |
||
| Zeile 52: | Zeile 52: | ||
== Funktionaler Systementwurf/Technischer Systementwurf == | == Funktionaler Systementwurf/Technischer Systementwurf == | ||
Im folgenden Systementwurf wird das Projekt in Systemkomponenten unterteilt: | |||
* '''Arduino: ''' Programmiert mit Matlab Simulink. | |||
* '''Motor/Schwungrad: ''' Steuerung des Motors bzw des Schwungrads | |||
* '''Gyroskop: ''' Positionsabfrage mittels eines Gyroskops | |||
* '''Regler: ''' Regler zur Senkrechtstellung | |||
<br/> | |||
<gallery widths="450" heights="450"> | <gallery widths="450" heights="450"> | ||
Datei:Funktionaler Systementwurf Selbstregelndes Schwungrad.png| Funktionaler Systementwurf - Skizze | Datei:Funktionaler Systementwurf Selbstregelndes Schwungrad.png| Funktionaler Systementwurf - Skizze | ||
Version vom 5. Oktober 2023, 07:24 Uhr
Autor: Paul Janzen, Bastian Hannappel
Betreuer: noch offen
Einleitung
Das Projekt "Selbstregelndes Schwungrad" im Rahmen des Moduls Mechatronische Systeme 2 im 5. Semester des Studiengangs Mechatronik handelt von einem Schwungrad, welches durch einen Motor an einer Halterung angebracht ist. Die Halterung ist an einer Stelle mit dem Boden verbunden, kann aber entlang einer Ebene um diesen Punkt rotieren. Durch ein Gyroskop erkennt ein Arduino ob die Halterung senkrecht stehen. Sollte etwas die Halterung in eine Richtung kippen lassen, kann das Schwungrad durch gezielte Drehungen dem entgegenwirken und sich wieder senkrecht aufstellen.
Anforderungen
| Nr. | Beschreibung | Bereich | Zuständig |
|---|---|---|---|
| 1 | Halterung und Schwungrad zeichnen und herstellen | Hardware | noch offen |
| 2 | Halterung, Schwungrad, Motor und Gyroskop montieren | Hardware | noch offen |
| 3 | Erfassung des Gyroskops | Software | noch offen |
| 4 | Steuerung des Motors | Software | noch offen |
| 5 | Regler zum Senkrechtstehen der Halterung bei äußeren Einflüssen | Software | noch offen |
| 6 | Optional: Initiales Selbstaufstellen aus Ruheposition | Software | noch offen |
Funktionaler Systementwurf/Technischer Systementwurf
Im folgenden Systementwurf wird das Projekt in Systemkomponenten unterteilt:
- Arduino: Programmiert mit Matlab Simulink.
- Motor/Schwungrad: Steuerung des Motors bzw des Schwungrads
- Gyroskop: Positionsabfrage mittels eines Gyroskops
- Regler: Regler zur Senkrechtstellung
-
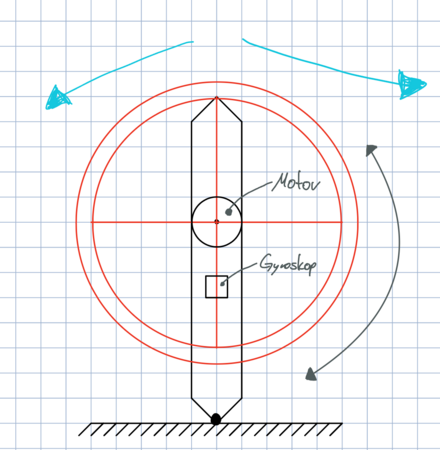 Funktionaler Systementwurf - Skizze
Funktionaler Systementwurf - Skizze

Komponentenspezifikation
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)