AF: Fernbedienung (SenFernb): Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 18: | Zeile 18: | ||
=== Schnittstelle zur DS1104 === | === Schnittstelle zur DS1104 === | ||
{| | {| class="wikitable" | ||
|+ style = "text-align: left"|Tabelle 2: Pinbelegung/Anschlussplan | |||
! style="font-weight: bold;" | NR | |||
! style="font-weight: bold;" | Pin | |||
! style="font-weight: bold;" | Typ | |||
! style="font-weight: bold;" | Funktion | |||
|- | |||
| 1 || VIN || INPUT || Spannungsversorgung 3,3V oder 5V | |||
|- | |||
| 2 || GND || INPUT || Spannungsversorgung | |||
|- | |||
| 3 || 3.3V || OUTPUT || | |||
|- | |||
| 4 || X || OUTPUT|| Rotation um X-Achse (pitch axis = Nickachse (nach vorne/hinten)) | |||
|- | |||
| 5 || 4X || OUTPUT|| Rotation um X-Achse verstärkt (pitch axis = Nickachse (nach vorne/hinten)) | |||
|- | |||
| 6 || Vref || OUTPUT || | |||
|- | |||
| 7 || 4Z || OUTPUT|| Rotation um Z-Achse verstärkt (yaw axis = Gierrate (nach links/rechts)) | |||
|- | |||
| 8 || Z || OUTPUT|| Rotation um Z-Achse (yaw axis = Gierrate (nach links/rechts)) | |||
|- | |||
|- | |||
| 9 || PD || || | |||
|- | |||
| 10 || ST || || | |||
|- | |||
|} | |||
Wobei LS für Lenk-Servo uns FR für Fahrtenregler steht. | Wobei LS für Lenk-Servo uns FR für Fahrtenregler steht. | ||
Version vom 21. April 2023, 12:23 Uhr
Autor: Johann Kismann & Dominik König
Primärsensor
Es besteht bereits ein Artikel zur Fernbedienung, welcher unter folgendem Link aufgerufen werden kann: Fahrzeughardware
Messkette
-
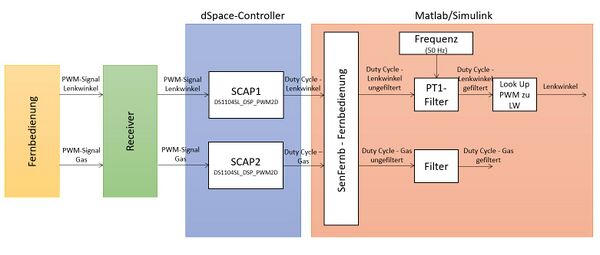 Abbildung 1: Messkette-Fernbedienung
Abbildung 1: Messkette-Fernbedienung

Systementwurf
Sensoranschlussplan
Analoge Singalverarbeitung
Schnittstelle zur DS1104
| NR | Pin | Typ | Funktion |
|---|---|---|---|
| 1 | VIN | INPUT | Spannungsversorgung 3,3V oder 5V |
| 2 | GND | INPUT | Spannungsversorgung |
| 3 | 3.3V | OUTPUT | |
| 4 | X | OUTPUT | Rotation um X-Achse (pitch axis = Nickachse (nach vorne/hinten)) |
| 5 | 4X | OUTPUT | Rotation um X-Achse verstärkt (pitch axis = Nickachse (nach vorne/hinten)) |
| 6 | Vref | OUTPUT | |
| 7 | 4Z | OUTPUT | Rotation um Z-Achse verstärkt (yaw axis = Gierrate (nach links/rechts)) |
| 8 | Z | OUTPUT | Rotation um Z-Achse (yaw axis = Gierrate (nach links/rechts)) |
| 9 | PD | ||
| 10 | ST |
Wobei LS für Lenk-Servo uns FR für Fahrtenregler steht.
Sensorblock - SenXXX
Sensorblock - SabXXX
Praktische Aufgabe
Signalanalyse
Liste offener Punkte (LOP)
| # | Problem | Analyse | Maßnahme | Freigabe | Wirksamkeit | Dokumentation |
|---|---|---|---|---|---|---|
| 1 | ||||||
| 2 | ||||||
| 3 | ||||||
| 4 | ||||||
| 5 |
Legende
- Problem: Was genau ist das Problem? Wo tritt das Problem auf? Wie zeigt sich das Problem? Wann tritt das Problem auf? Warum ist es ein Problem?
- Analyse: Was ist die Ursache des Problems?
- Maßnahme: Maßnahme zur Beseitigung der identifizierten Ursache
- Freigabe: Abstimmung der Maßnahme mit Prof. Schneider
- Wirksamkeit: Beschreibung Nachweis Wirksamkeit (Dummy-Prüfung, Versuche, Kurzzeitfähigkeit, Kennzahlen, Audit, etc.)
- Dokumentation: Doku der Lösung im HSHL-Wiki
Zusammenfassung
Dokumentation in SVN
→ zurück zum Hauptartikel: Praktikum SDE | SDE-Team 2023/24 | Lernzielkontrolle 1