Datenübertragung zwischen PC und dSPACE Karte: Unterschied zwischen den Versionen
| Zeile 153: | Zeile 153: | ||
== Konzept für die Übertragung == | == Konzept für die Übertragung == | ||
Für die Übertragung der Daten wurden zwei Konzepte ausgearbeitet. Das erste Konzept arbeitet mit einer statischen Übertragung, bei der immer alle 149 Byte übertragen werden. Das zweite Konzept vergleicht zunächst den alten Wert der Variable mit dem neuen Wert. Wird dort ein Grenzwert überschritten, oder kommt es zu einem Flankenwechsel, so werden die Daten übertragen. Sonst wird auf die Übertragung dieser Daten verzichtet. | |||
<gallery mode = "traditional" widths=400px heights=700px> | <gallery mode = "traditional" widths=400px heights=700px> | ||
File:Send_Data_Big_Endian_First.png|Abb. 2: | File:Send_Data_Big_Endian_First.png|Abb. 2: Statische Übertragung | ||
File:HandshakeRS232.png|Abb. 3: | File:Sende_Daten.png|Abb. 3: Dynamsiche Übertragung | ||
File:Auswahl_Daten.png|Abb. 4: Auswahl, welche Daten übertragen werden | |||
</gallery> | |||
Für eine erfolgreiche Kommunikation muss zudem ein Handshake durchgeführt werden. Mit diesem wird die Verbindung zwischen PC und DSPACE-Karte getestet. Der Handshake ist hierbei in beiden Programmen gleich umgesetzt. | |||
<gallery mode = "traditional" widths=400px heights=700px> | |||
File:HandshakeRS232.png|Abb. 3: Dynamische Übertragung | |||
</gallery> | </gallery> | ||
Version vom 4. Dezember 2020, 21:12 Uhr
Autor: Hagen Heuer und Tim Kruse
Betreuer: Prof. Dr. Mirek Göbel
Einleitung
Der folgende Artikel beschäftigt sich mit der Kommunikation zwischen dem PC und der dSPACE Karte. Die Kommunikation erfolgt hierbei mittels einer RS232-Schnittstelle. Über diese Schnittstelle wird unteranderem das Spurpolynom sowie Lidar-Daten versendet. Eine genaue Beschreibung, welche Daten übertragen werden, ist in Abbildung X zu sehen. Hier werden zudem die Datentypen genannt.
Für die Bearbeitung der Aufgabe wird zunächst der aktuelle Stand des Fahrzeugs ermittelt, da bereits eine RS232 Kommunikation besteht. Diese wird zunächst getestet. Anschließend wird die Struktur des C-Programm überarbeitet, da Funktionen des C-Programms des Vorsemesters ausgelagert werden. Im letzten Schritt soll die Datenübertragungsrate nach Möglichkeit erhöht werden und fehlende Daten übertragen werden. Diese Teilaufgabe wird durch Funktionstest abgeschlossen.
Anforderungen
-
 Abb. 1: Lastenheft REQ10.3160
Abb. 1: Lastenheft REQ10.3160

-
 Abb. 2: Lastenheft REQ10.3275
Abb. 2: Lastenheft REQ10.3275

-
 Abb. 3: Lastenheft REQ10.3280
Abb. 3: Lastenheft REQ10.3280

-
 Abb. 4: Lastenheft REQ10.3290
Abb. 4: Lastenheft REQ10.3290

-
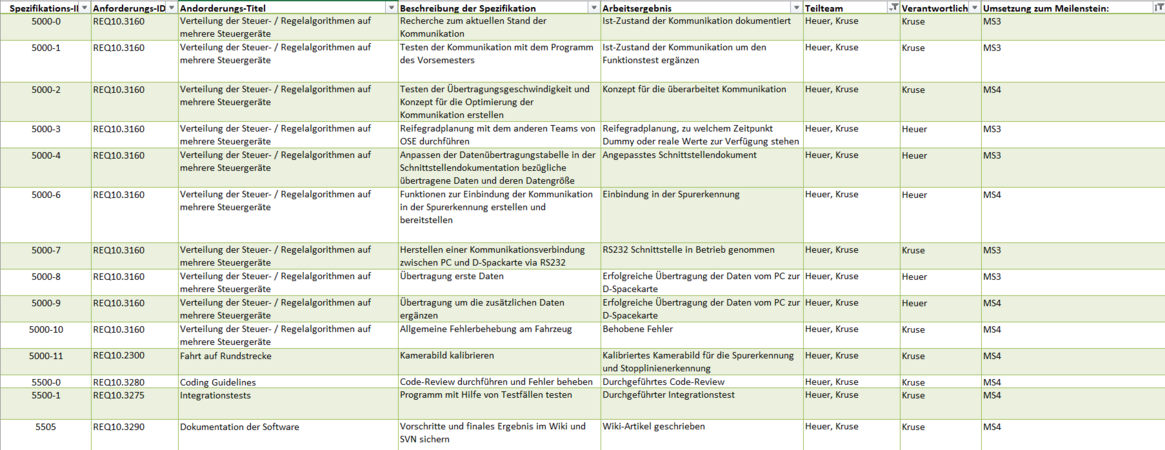 Abb. 5: Pflichtenheft
Abb. 5: Pflichtenheft

Aktuelle Stand des Programms
Im ersten Schritt wurden die beiden bestehenden Ansätze im SVN betrachtet und mit einander verglichen. Ziel war es, den aktuellen Stand zu ermitteln und ein Programm auszuwählen, mit dem die Kommunikation umgesetzt wird. Die Unterschiede und Gemeinsamkeiten der beiden Programme sind in den nachfolgenden Tabelle ausgelistet.
Vergleich der beiden Programme
| OSE_Fusion_Final_Software | OSE_Draufsicht_Spurpolynom_RS232 | Gemeinsamkeiten |
|---|---|---|
| Baudrate von 19200 | Baudrate von 115200 | |
| Alle Daten werden bereits übertragen | Spurparameter a,b und c werden übertragen | |
| Daten werden aufwendig einzeln verschickt | Versand der Daten effektiv in for-Schleife gelöst | |
| Übergabe an Funktion zum Senden gut gelöst, da Daten als struct übergeben werden | Spurparameter werden einzeln an Funktion zum Senden übergeben | |
| Vertauschen der Byte-Ordnung aufwendig gelöst und teilweise überflüssig | Vertauschen der Byte-Ordnung durch den Einsatz von Zeigern sehr gut implementiert | |
| Verschachtelte Funktionsaufrufe zum Übertragen der Daten | ||
| Unter Visual Studio 2019 nicht lauffähig | Unter Visual Studio 2019 lauffähig | |
| Kamera bereits eingebunden | ||
| Einbindung des Lidars vorhanden | Einbindung des Lidars nicht vorhanden |
Da die Einbindung des Lidars und der Kamera auf neuem Weg erfolgen soll, ist es von Vorteil das Programm vom Wintersemester 19/20 OSE_Draufsicht_Spurpolynom_RS232 zu nehmen. Zudem ist hier ein guter Ansatz für die Übertragung der Daten vorhanden, der lediglich um die weiteren Daten ergänzt werden muss. Die Aufgabe in diesem Semerster wird es sein, die Übertragung auf weitere Daten, welche in der nachfolgenden Tabelle zu sehen sind, auszuweiten. Zudem soll die Kommunikation bezüglich der Geschwindigkeit optimiert werden und eine vollständige Dokumentation der Ergebnisse erfolgen.
PC zu dSpace
| Signalname | Datentyp | Beschreibung |
|---|---|---|
| a | float32 (4 Byte) | Fahrspurparameter |
| b | float32 (4 Byte) | Fahrspurparameter |
| c | float32 (4 Byte) | Fahrspurparameter |
| Spurzuordnung | bool (1 Byte) | Spurzuordnung: 1 = rechte Fahrspur, 0 = linke Fahrspur |
| Stopplinie erkannt | bool (1 Byte) | 1 = Stopplinie erkannt, 0 = keine Stopplinie erkannt |
| Abstand Stopplinie | float32 (4 Byte) | Entfernung zur Stopplinie |
| n Objekte | uint8 (1 Byte) | Anzahl relevanter Objekte (maximal 5) |
| Objekt[n Objekte].Nummer | uint8 (1 Byte) | Objektzähler |
| Objekt[n Objekte].x0 | float32 (4 Byte) | x-Koordinate des Objektmittelpunktes (mitte, vorn) |
| Objekt[n Objekte].y0 | float32 (4 Byte) | y-Koordinate des Objektmittelpunktes (mitte, vorn) |
| Objekt[n Objekte].b | float32 (4 Byte) | Objektbreite |
| Objekt[n Objekte].t | float32 (4 Byte) | Objekttiefe |
| Objekt[n Objekte].alpha | float32 (4 Byte) | Objektausrichtung |
| Objekt[n Objekte].v | float32 (4 Byte) | Betrag des Geschwindigkeitsvektors |
| Objekt[n Objekte].Plausibel | uint8 (1 Byte) | Vertrauenswert für das Objekt in Prozent ( 0 = minimale Vertrauen, 100 = maximale Vertrauen) |
| Gesamtgröße des Datenpakets | 149 Byte | |
Im nächsten Schritt soll nun das bestehende C-Programm getestet werden, um dem Team ein funktionsfähiges Fahrzeug bereitzustellen. Der Test der Software wurde wie in Fahrzeugkommunikation via RS232 beschrieben erfolgreich durchgeführt. Daher kann dem Team nun eine funktionierende Kommunikation mit Übertragung der Spurparameter a, b und c zur Verfügung gestellt werden.
Konzept für die Übertragung
Für die Übertragung der Daten wurden zwei Konzepte ausgearbeitet. Das erste Konzept arbeitet mit einer statischen Übertragung, bei der immer alle 149 Byte übertragen werden. Das zweite Konzept vergleicht zunächst den alten Wert der Variable mit dem neuen Wert. Wird dort ein Grenzwert überschritten, oder kommt es zu einem Flankenwechsel, so werden die Daten übertragen. Sonst wird auf die Übertragung dieser Daten verzichtet.
-
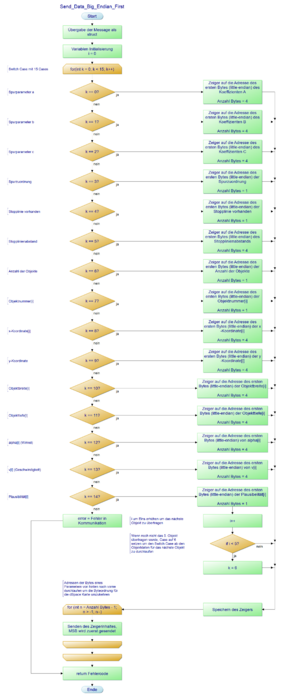 Abb. 2: Statische Übertragung
Abb. 2: Statische Übertragung -
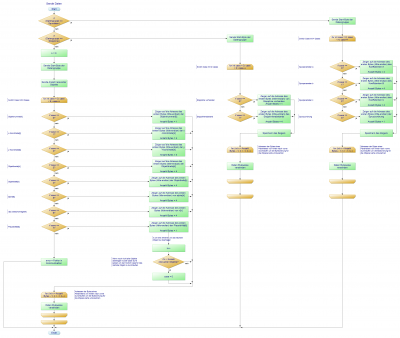 Abb. 3: Dynamsiche Übertragung
Abb. 3: Dynamsiche Übertragung -
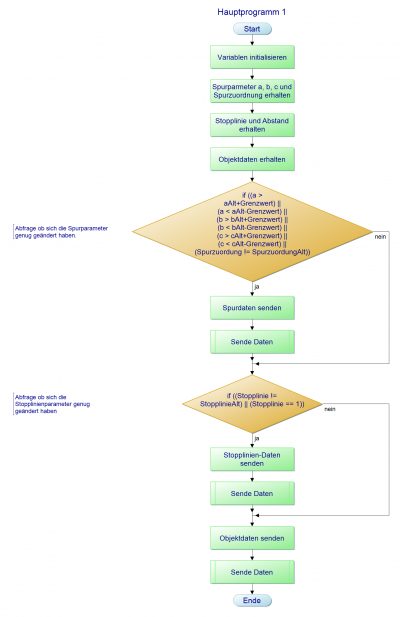 Abb. 4: Auswahl, welche Daten übertragen werden
Abb. 4: Auswahl, welche Daten übertragen werden



Für eine erfolgreiche Kommunikation muss zudem ein Handshake durchgeführt werden. Mit diesem wird die Verbindung zwischen PC und DSPACE-Karte getestet. Der Handshake ist hierbei in beiden Programmen gleich umgesetzt.
-
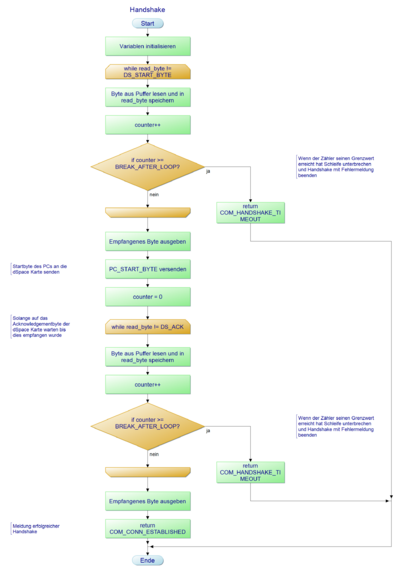 Abb. 3: Dynamische Übertragung
Abb. 3: Dynamische Übertragung

Hauptprogramm
Spurerkennung
Stopplinienerkennung
Datenübertragung
Empfang der Daten in Matlab/Simulink
Programmierung
Komponententest
Zusammenfassung
Link zum Quelltext in SVN
→ zurück zum Hauptartikel: SDE Praktikum Autonomes Fahren