Datenübertragung zwischen PC und dSPACE Karte: Unterschied zwischen den Versionen
| Zeile 22: | Zeile 22: | ||
<gallery mode = "traditional" widths=1000px heights=350px> | <gallery mode = "traditional" widths=1000px heights=350px> | ||
File: | File:REQ10.3290 Heuer Kruse.png|Abb. 4: Lastenheft REQ10.3290 | ||
</gallery> | </gallery> | ||
<gallery mode = "traditional" widths=1000px heights=350px> | <gallery mode = "traditional" widths=1000px heights=350px> | ||
File:Pflichtenheft WS20 Heuer Kruse.png|Abb. | File:Pflichtenheft WS20 Heuer Kruse.png|Abb. 5: Pflichtenheft | ||
</gallery> | </gallery> | ||
Version vom 15. Oktober 2020, 14:29 Uhr
Autor: Hagen Heuer und Tim Kruse
Betreuer: Prof. Dr. Mirek Göbel
Einleitung
Der folgende Artikel beschäftigt sich mit der Kommunikation zwischen dem PC und der dSPACE Karte. Die Kommunikation erfolgt hierbei mittels einer RS232-Schnittstelle. Über diese Schnittstelle wird unteranderem das Spurpolynom sowie Lidar-Daten versendet. Eine genaue Beschreibung, welche Daten übertragen werden, ist in Abbildung X zu sehen. Hier werden zudem die Datentypen genannt.
Für die Bearbeitung der Aufgabe wird zunächst der aktuelle Stand des Fahrzeugs ermittelt, da bereits eine RS232 Kommunikation besteht. Diese wird zunächst getestet. Anschließend wird die Struktur des C-Programm überarbeitet, da Funktionen des C-Programms des Vorsemesters ausgelagert werden. Im letzten Schritt soll die Datenübertragungsrate nach Möglichkeit erhöht werden und fehlende Daten übertragen werden. Diese Teilaufgabe wird durch Funktionstest abgeschlossen.
Anforderungen
-
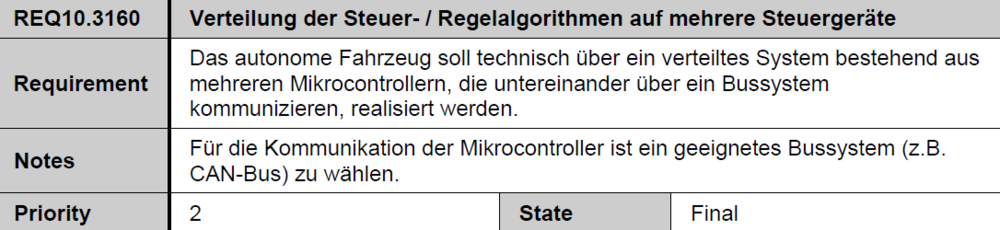 Abb. 1: Lastenheft REQ10.3160
Abb. 1: Lastenheft REQ10.3160

-
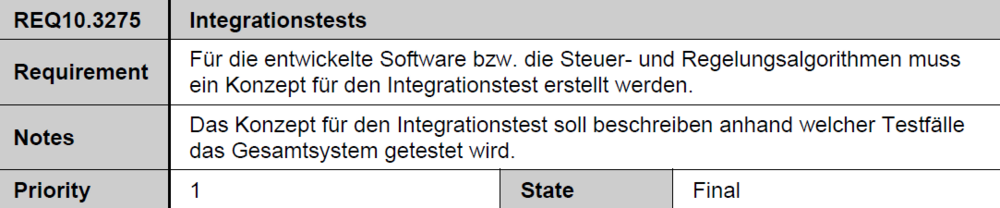 Abb. 2: Lastenheft REQ10.3275
Abb. 2: Lastenheft REQ10.3275

-
 Abb. 3: Lastenheft REQ10.3280
Abb. 3: Lastenheft REQ10.3280

-
 Abb. 4: Lastenheft REQ10.3290
Abb. 4: Lastenheft REQ10.3290

-
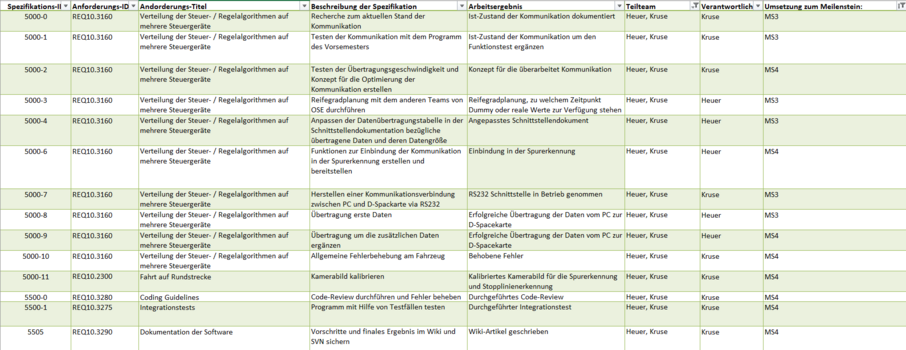 Abb. 5: Pflichtenheft
Abb. 5: Pflichtenheft

Konzept
Programmierung
Komponententest
Zusammenfassung
Link zum Quelltext in SVN
→ zurück zum Hauptartikel: SDE Praktikum Autonomes Fahren