RoboSoccer Gruppe A4 - WS 18/19: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Die Seite wurde neu angelegt: „hallo123“ |
Keine Bearbeitungszusammenfassung |
||
| Zeile 1: | Zeile 1: | ||
'''Autor:''' [[Benutzer:Fabian Müller|Fabian Müller]] | |||
== Einleitung == | |||
Hier steht ein Text | |||
=== Das Team === | |||
#[[Benutzer:Jens Schwabe|Jens Schwabe]] | |||
#*Entwicklung und programmieren mithilfe von BricxCC | |||
#*Entwicklung einer Spielstrategie mithilfe von PAP-Designer | |||
#[[Benutzer:Jahn Gross|Jahn Gross]] | |||
#*Entwicklung und programmieren mithilfe von BricxCC | |||
#*Entwicklung einer Spielstrategie mithilfe von PAP-Designer | |||
#[[Benutzer:Fabian Müller|Fabian Müller]] | |||
#*Bau des Roboters | |||
#*Erstellung des Wiki-Artikels | |||
#*Erstellung des Werbeplaketes | |||
== Hardware== | |||
=== 1. Unterkonstruktion === | |||
::Das Grundkonstrukt von Roman besteht aus zwei Servomotoren, die es dem Roboter erlauben, sich um die eigene Achse zu drehen. Es sind maximal 160 Umdrehungen pro Minuten bei einem Drehmoment von 0,2 Nm möglich. Der Roboter besitzt ebenfalls einen tiefen Schwerpunkt sowie seitliche Stützen, damit bei jeder Gelegenheit eine gute Bodenhaftung garantiert ist. Des weiteren wurde auf eine leichte und kompakte Bauweise geachtet, um den Roboter so wendig wie möglich zu halten | |||
=== 2. Greifer/Schussmechanismus: === | |||
::Der Greifer besteht aus sich rotierenden Stangen, die an einem weiteren Servomotor oberhalb der Konstruktion angebracht sind. Die dort angebrachten Stangen sind um 360° rotierbar, sodass das greifen und das schießen des Balls sehr simpel gestaltet wird. Dreht der Motor sich rückwärts wird der Ball gefangen, während dessen bei der Rotation vorwärts geschossen wird. | |||
=== 3. NXT-Brick === | |||
::Der NXT- Brick ist die Steuereinheit des gesamten Roboters. Dort werden die Informationen über die Eingänge verarbeitet und die jeweilige Aktion durch die Ausgänge weiter gegeben. | |||
=== 4. Infarot Sensor: === | |||
:::[[Datei:Infarotsensor.PNG|200px|thumb|links|Empfangsbereiche: Infarotsensor<ref> Eigenes Foto </ref>]] | |||
::Der Infrarotsensor (IRSEEKERV2 )besitzt 5 Detektoren, die in einem Radius von 240 Grad, Infrarotsignale erfassen können. Diese 5 Detektoren lassen sich in 9 Sektoren unterteilen um eine genaue Richtung des Infrarotsignales zu bestimmen. Basierend auf dem pyroelektrischen Prinzip, lässt sich sogar die Intensität der Infrarotstrahlen in den Detektoren bestimmen. Dadurch kann ein Abstand des Infrarotball`s ermittelt werden. | |||
=== 5. Tastsensor: === | |||
::Dieser Sensor hat die Funktion, zu erkennen ob sich ein Ball in der Schussvorrichtung befindet. Prallt der Ball gegen den Splint des Tastsensors, bekommt der NXT das Signal 1. Dieses Signal kann mit Hilfe des Programmes weiter verarbeitet werden. | |||
=== 6. Kompass: === | |||
::Der Sensor führt 100 Messungen pro Sekunde durch und übermittelt eine Zahl zwischen 0 und 359, die den Winkel zum Nordpol ausdrückt. Der Sensor verfügt über zwei Modi: | |||
#Im Lesemodus übermittelt der Sensor jedes Mal einen Wert, wenn er vom intelligenten Lego Mindstorms NXT-Stein einen Lesebefehl erhält. | |||
#Im Kalibriermodus kann der Sensor so eingestellt werden, dass er störende Magnetfelderdes Roboter-Elektromotors, der Batterien usw. neutralisiert. | |||
::Die Werte können als relative oder absolute Werte angezeigt werden. Das erleichtert die Programmierung, wenn der Roboter einer bestimmten Richtung folgen soll. | |||
→ zurück zum Hauptartikel: [[RoboSoccer_WS_17/18|Informatikpraktikum WS 17/18]] | |||
Version vom 1. Februar 2019, 16:45 Uhr
Autor: Fabian Müller
Einleitung
Hier steht ein Text
Das Team
- Jens Schwabe
- Entwicklung und programmieren mithilfe von BricxCC
- Entwicklung einer Spielstrategie mithilfe von PAP-Designer
- Jahn Gross
- Entwicklung und programmieren mithilfe von BricxCC
- Entwicklung einer Spielstrategie mithilfe von PAP-Designer
- Fabian Müller
- Bau des Roboters
- Erstellung des Wiki-Artikels
- Erstellung des Werbeplaketes
Hardware
1. Unterkonstruktion
- Das Grundkonstrukt von Roman besteht aus zwei Servomotoren, die es dem Roboter erlauben, sich um die eigene Achse zu drehen. Es sind maximal 160 Umdrehungen pro Minuten bei einem Drehmoment von 0,2 Nm möglich. Der Roboter besitzt ebenfalls einen tiefen Schwerpunkt sowie seitliche Stützen, damit bei jeder Gelegenheit eine gute Bodenhaftung garantiert ist. Des weiteren wurde auf eine leichte und kompakte Bauweise geachtet, um den Roboter so wendig wie möglich zu halten
2. Greifer/Schussmechanismus:
- Der Greifer besteht aus sich rotierenden Stangen, die an einem weiteren Servomotor oberhalb der Konstruktion angebracht sind. Die dort angebrachten Stangen sind um 360° rotierbar, sodass das greifen und das schießen des Balls sehr simpel gestaltet wird. Dreht der Motor sich rückwärts wird der Ball gefangen, während dessen bei der Rotation vorwärts geschossen wird.
3. NXT-Brick
- Der NXT- Brick ist die Steuereinheit des gesamten Roboters. Dort werden die Informationen über die Eingänge verarbeitet und die jeweilige Aktion durch die Ausgänge weiter gegeben.
4. Infarot Sensor:
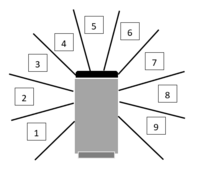
Empfangsbereiche: Infarotsensor[1]

- Der Infrarotsensor (IRSEEKERV2 )besitzt 5 Detektoren, die in einem Radius von 240 Grad, Infrarotsignale erfassen können. Diese 5 Detektoren lassen sich in 9 Sektoren unterteilen um eine genaue Richtung des Infrarotsignales zu bestimmen. Basierend auf dem pyroelektrischen Prinzip, lässt sich sogar die Intensität der Infrarotstrahlen in den Detektoren bestimmen. Dadurch kann ein Abstand des Infrarotball`s ermittelt werden.
5. Tastsensor:
- Dieser Sensor hat die Funktion, zu erkennen ob sich ein Ball in der Schussvorrichtung befindet. Prallt der Ball gegen den Splint des Tastsensors, bekommt der NXT das Signal 1. Dieses Signal kann mit Hilfe des Programmes weiter verarbeitet werden.
6. Kompass:
- Der Sensor führt 100 Messungen pro Sekunde durch und übermittelt eine Zahl zwischen 0 und 359, die den Winkel zum Nordpol ausdrückt. Der Sensor verfügt über zwei Modi:
- Im Lesemodus übermittelt der Sensor jedes Mal einen Wert, wenn er vom intelligenten Lego Mindstorms NXT-Stein einen Lesebefehl erhält.
- Im Kalibriermodus kann der Sensor so eingestellt werden, dass er störende Magnetfelderdes Roboter-Elektromotors, der Batterien usw. neutralisiert.
- Die Werte können als relative oder absolute Werte angezeigt werden. Das erleichtert die Programmierung, wenn der Roboter einer bestimmten Richtung folgen soll.
→ zurück zum Hauptartikel: Informatikpraktikum WS 17/18
- ↑ Eigenes Foto