BluetoothRegelung.ino: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
| Zeile 29: | Zeile 29: | ||
'''URL:''' https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/Test/trackeSendeReglerTest.m | '''URL:''' https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/Test/trackeSendeReglerTest.m | ||
== Vorbereitung == | |||
Was ist für den Systemtest vorzubereiten: | |||
Hardwareaufbau aufbauen | |||
* Bluetooth Dongle im PC einstecken | |||
* Topcon Station aufbauen | |||
* Topcon Station so ausrichten, dass die Y-Achse als Solllinie genutzt werden kann | |||
* [[Referenzmessung_mit_der_Topcon_Robotic_Total_Station]] Station gemäß Artikel in Betrieb nehmen. | |||
* Matlab R2024b starten | |||
* Script [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/c-files/BluetoothRegelung.ino BluetoothRegelung.ino] öffnen und auf den Arduino eines AlphaBot hochladen | |||
* Script [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/m-files/trackeSendeReglerTest.m trackeSendeReglerTest.m] öffnen | |||
* TopCon Prisma auf Referenzpunkten der Y-Achse als Sollinie platzieren und in der Funktion sucheGerade als Referenzpunkte einfügen | |||
* Script [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/m-files/trackeSendeReglerTest.m trackeSendeReglerTest.m] starten und seriellen Monitor öffnen | |||
* Script [https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/m-files/trackeSendeReglerTest.m trackeSendeReglerTest.m] starten | |||
* Werte aus seriellem Monitor und Matlab vergleichen | |||
== Test == | |||
{| class="wikitable" | {| class="wikitable" | ||
! style="font-weight: bold;" | ID | ! style="font-weight: bold;" | ID | ||
! style="font-weight: bold;" | Testfallbeschreibung | ! style="font-weight: bold;" | Testfallbeschreibung | ||
! style="font-weight: bold;" | | ! style="font-weight: bold;" | Eingang | ||
! style="font-weight: bold;" | Erwartetes Ergebnis | ! style="font-weight: bold;" | Erwartetes Ergebnis | ||
! style="font-weight: bold;" | Testergebnis | ! style="font-weight: bold;" | Testergebnis | ||
! style="font-weight: bold;" | Testperson | ! style="font-weight: bold;" | Testperson | ||
! style="font-weight: bold;" | Datum | ! style="font-weight: bold;" | Datum | ||
|+ style = "text-align: left"|Tabelle | |+ style = "text-align: left"|Tabelle 1: Testbericht für den Komponententest | ||
|- | |- | ||
| 1 | | 1 | ||
| | | Daten korrekt empfangen | ||
| | | Regelabweichung als Distanz zur Solllinie in mm | ||
| | | AlphaBotwerte = Matlabwerte | ||
| | | | ||
| | | | ||
| | | | ||
|- | |- | ||
| 2 | | 2 | ||
| | | Stellgroesse korrekt berechnet | ||
| | | Je nach position zur Solllinie wird die Stellgroesse passend berechnet | ||
| | | Stellgröße so, dass die Regelung gegen 0 erfolgt | ||
| | | | ||
| | | | ||
| | | | ||
|- | |- | ||
| 3 | | 3 | ||
| | | Regelverhalten | ||
| | | Der AlphaBot soll der Solllinie mit einem angemessenen Regelverhalten folgen | ||
| | | | ||
| | | | ||
| | | | ||
| | | | ||
|- | |- | ||
|} | |} | ||
---- | ---- | ||
→ zurück zum Hauptartikel: [[Referenzmessung_mit_der_Topcon_Robotic_Total_Station|TopCon Referenzstation]] | → zurück zum Hauptartikel: [[Referenzmessung_mit_der_Topcon_Robotic_Total_Station|TopCon Referenzstation]] | ||
Version vom 9. Oktober 2025, 09:56 Uhr
Autor: Lukas Berkemeier
- Bild
Einleitung/Funktion
Anforderungen
| ID | Inhalt | Prio | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|
| 1 | Blutoothdaten müssen in der gleichen Einheit empfangen werden | 1 | Lukas Berkemeier | 09.10.2025 |
Softwareentwurf
-
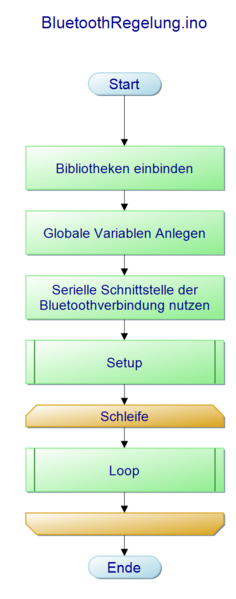 Abb. 1: Softwareentwurf Hauptprogramm
Abb. 1: Softwareentwurf Hauptprogramm -
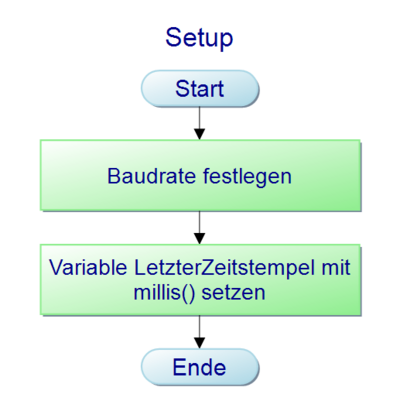 Abb. 02: Softwareentwurf Setup
Abb. 02: Softwareentwurf Setup -
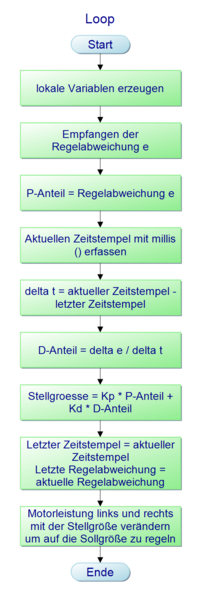 Abb. 03: Softwareentwurf Loop
Abb. 03: Softwareentwurf Loop



Umsetzung
Modultest
Da es sich bei dieser Entwicklung um die einer einzelnen Komponente handelt, schließt der Komponententest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 4).
Vorbereitung
Was ist für den Systemtest vorzubereiten: Hardwareaufbau aufbauen
- Bluetooth Dongle im PC einstecken
- Topcon Station aufbauen
- Topcon Station so ausrichten, dass die Y-Achse als Solllinie genutzt werden kann
- Referenzmessung_mit_der_Topcon_Robotic_Total_Station Station gemäß Artikel in Betrieb nehmen.
- Matlab R2024b starten
- Script BluetoothRegelung.ino öffnen und auf den Arduino eines AlphaBot hochladen
- Script trackeSendeReglerTest.m öffnen
- TopCon Prisma auf Referenzpunkten der Y-Achse als Sollinie platzieren und in der Funktion sucheGerade als Referenzpunkte einfügen
- Script trackeSendeReglerTest.m starten und seriellen Monitor öffnen
- Script trackeSendeReglerTest.m starten
- Werte aus seriellem Monitor und Matlab vergleichen
Test
| ID | Testfallbeschreibung | Eingang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|
| 1 | Daten korrekt empfangen | Regelabweichung als Distanz zur Solllinie in mm | AlphaBotwerte = Matlabwerte | |||
| 2 | Stellgroesse korrekt berechnet | Je nach position zur Solllinie wird die Stellgroesse passend berechnet | Stellgröße so, dass die Regelung gegen 0 erfolgt | |||
| 3 | Regelverhalten | Der AlphaBot soll der Solllinie mit einem angemessenen Regelverhalten folgen |
→ zurück zum Hauptartikel: TopCon Referenzstation