|
|
| Zeile 62: |
Zeile 62: |
| | OK | | | OK |
| | Prof. Schneider | | | Prof. Schneider |
| | 21.01.2018
| |
| |-
| |
| | 4
| |
| | Der Mäher trifft auf ein Hindernis.
| |
| | 34.0, 4.0, [33.7;4.0], 0, Karte, 1, 0, 1000
| |
| | Neues Feld wird magenta markiert, altes Feld wird hellgrün markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 5
| |
| | Das überschreitet die Perimeterschleife in unbekanntes Gebiet.
| |
| | 0.0, 3.0, [0.3;3.0], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird weiß markiert, altes Feld wird rot markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 6
| |
| | Das Fährt auf ungemähtem Rasen.
| |
| | 0.6, 0.6, [0.3;0.3], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird blau markiert, altes Feld wird hellgrün markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 6b
| |
| | Das Fährt auf gemähtem Rasen.
| |
| | 0.6, 0.6, [0.3;0.3], 0, Karte, 0, 0, 1000
| |
| | Neues Feld wird blau markiert, altes Feld wird hellgrün markiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 7
| |
| | Der Mäher fährt mit fester Zykluszeit eine simulierte Mäanderfahrt.
| |
| | Mäander simuliert, *,*,*, 0, Karte, 0, 0, 1000
| |
| | Die Karte wird zyklisch aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 8
| |
| | Einbindung des Matlab-Skriptes in Simulink.
| |
| | Mäander simuliert in Simulink
| |
| | Die Karte wird zyklisch aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 9
| |
| | Test der Eingangsparameter
| |
| | Variation der Eingangsparameter
| |
| | Die Karte wird zyklisch gemäß Anforderungen aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 10
| |
| | Test der Ausgangsparameter
| |
| | Variation der Eingangsparameter
| |
| | Die Karte wird zyklisch gemäß Anforderungen aktualisiert.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 11
| |
| | Laufzeitmessung
| |
| | 0.3, 0.0, [0;0], 0, Karte, 0, 0, 1000
| |
| | Die Initialisierung muss 1s und die zyklische Darstellung muss 1ms unterschreiten.
| |
| | OK
| |
| | Prof. Schneider
| |
| | 21.01.2018
| |
| |-
| |
| | 12
| |
| | Kommentierung und Dokumentation entsprechen den Projektrichtlinien
| |
| | -
| |
| | Code Review, Artikel-Review
| |
| | OK
| |
| | Prof. Göbel
| |
| | 21.01.2018 | | | 21.01.2018 |
| |- | | |- |
Autor: Lukas Berkemeier
Einleitung/Funktion
Anforderungen
Tabelle 1: Anforderungen and das Modul
| ID |
Inhalt |
Prio |
Ersteller |
Datum |
Geprüft von |
Datum
|
| 1 |
Blutoothdaten müssen in der gleichen Einheit empfangen werden |
1 |
Lukas Berkemeier |
09.10.2025 |
|
|
Softwareentwurf
-
Abb. 1: Softwareentwurf Hauptprogramm
-
Abb. 02: Softwareentwurf Setup
-
Abb. 03: Softwareentwurf Loop
Umsetzung
URL: https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/c-files/BluetoothRegelung.ino
Modultest
Da es sich bei dieser Entwicklung um die einer einzelnen Komponente handelt, schließt der Komponententest mit dem Testbericht die Entwicklung ab (vgl. Tabelle 4).
URL: https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/_Semesterordner/WS2025/Sprint_1/Test/trackeSendeReglerTest.m
| ID
|
Testfallbeschreibung
|
Eingänge x,y,PosAlt,Ausrichtung,Karte,Bumper,Ultraschall,Perimeterschleife
|
Erwartetes Ergebnis
|
Testergebnis
|
Testperson
|
Datum
|
Tabelle 4: Testbericht für den Komponententest von KosTrafoTzuWelt.m
| 1
|
Ref A wir korrekt transformiert.
|
[-2.89;4.04;-0.03], [-2.89;4.04;-0.03], [2.49;2.31;-0.03];
|
[1.83;0;0]
|
OK
|
Prof. Schneider
|
09.10.2025
|
| 2
|
Der Mäher fährt auf der Perimeterschleife.
|
[]
|
Neues Feld wird blau markiert, altes Feld wird rot markiert.
|
OK
|
Prof. Schneider
|
21.01.2018
|
| 3
|
Der Mäher fährt ein Feld weiter.
|
0.3, 0.0, [0;0], 0, Karte, 0, 0, 1000
|
Neues Feld wird blau markiert.
|
OK
|
Prof. Schneider
|
21.01.2018
|
→ zurück zum Hauptartikel: TopCon Referenzstation
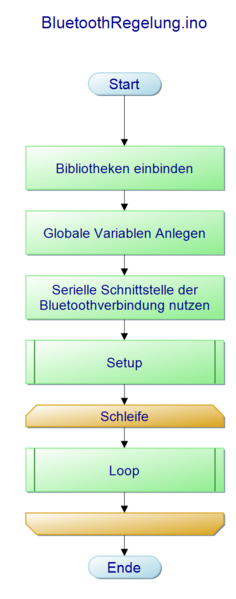 Abb. 1: Softwareentwurf Hauptprogramm
Abb. 1: Softwareentwurf Hauptprogramm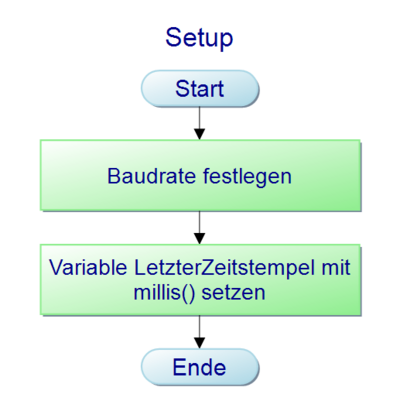 Abb. 02: Softwareentwurf Setup
Abb. 02: Softwareentwurf Setup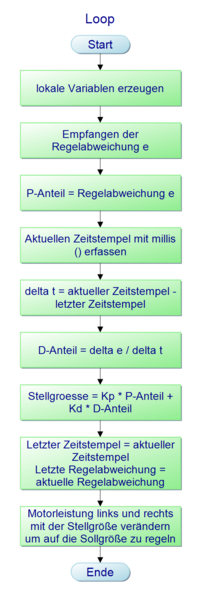 Abb. 03: Softwareentwurf Loop
Abb. 03: Softwareentwurf Loop

