JetRacer Inbetriebnahme: Unterschied zwischen den Versionen
Zur Navigation springen
Zur Suche springen
Keine Bearbeitungszusammenfassung |
Keine Bearbeitungszusammenfassung |
||
| Zeile 9: | Zeile 9: | ||
:Außerdem wurde für den Zugriff auf den Jetracer, wenn dieser nicht per HDMI an einen Monitor und an eine Tastatur sowie Maus angeschlossen war, das Programm NoMachine benutzt. Dieses Programm kann den Desktop des Roboters über das WLAN spiegeln, und erlaubt so einen kabellosen Zugriff. Hierfür muss lediglich die IP Adresse des Roboters innerhalb des WLANs im Programm angegeben werden, und dann kann eine Verbindung aufgebaut werden. | :Außerdem wurde für den Zugriff auf den Jetracer, wenn dieser nicht per HDMI an einen Monitor und an eine Tastatur sowie Maus angeschlossen war, das Programm NoMachine benutzt. Dieses Programm kann den Desktop des Roboters über das WLAN spiegeln, und erlaubt so einen kabellosen Zugriff. Hierfür muss lediglich die IP Adresse des Roboters innerhalb des WLANs im Programm angegeben werden, und dann kann eine Verbindung aufgebaut werden. | ||
==Inbetriebnahme des Roboters== | |||
:Um diesen Schritt durchzuführen muss eine SD-Karte mit einem Jetson Nano Image vorhanden sein, falls dies nicht der Fall ist wird im Abschnitt "[]" erklärt wie das Image auf der SD-Karte installiert werden kann. | :Um diesen Schritt durchzuführen muss eine SD-Karte mit einem Jetson Nano Image vorhanden sein, falls dies nicht der Fall ist wird im Abschnitt "[]" erklärt wie das Image auf der SD-Karte installiert werden kann. | ||
:'''Wifi verbinden''' | :'''Wifi verbinden''' | ||
| Zeile 24: | Zeile 24: | ||
:[] | :[] | ||
==Inbetriebnahme Virtuelle Maschine== | |||
:'''Virtuelle Maschine installieren''' | :'''Virtuelle Maschine installieren''' | ||
::The robot uses the ubuntu virtual machine as the remote control terminal, and it is more convenient and intuitive to control the robot by using various graphical tools of ROS. Here, open the Ubuntu image by VMware. VMware version should be not lower than 16. | ::The robot uses the ubuntu virtual machine as the remote control terminal, and it is more convenient and intuitive to control the robot by using various graphical tools of ROS. Here, open the Ubuntu image by VMware. VMware version should be not lower than 16. | ||
| Zeile 39: | Zeile 39: | ||
hostname # Gibt den Hostnamen der virtuellen Maschine aus | hostname # Gibt den Hostnamen der virtuellen Maschine aus | ||
::[[Datei:JetRacer_Kommunikation_Virtuelle_Step04.png|Step04]] | ::[[Datei:JetRacer_Kommunikation_Virtuelle_Step04.png|Step04]] | ||
==Kommunikation Zwischen den Systemen== | |||
Version vom 5. Februar 2025, 14:36 Uhr
Inbetriebnahme
- Jetracer Image
- Im Tutorial: Anleitung für die Inbetriebnahme des Racers wird beschrieben wo man das Image für den Jetracer herunterladen kann, und wie man es auf einer SD-Karte installiert. Das Installieren auf einer neuen SD-Karte ist relevant, da die mitgelieferte SD-Karte nicht sehr robust ist. Außerdem erklärt dieses Tutorial auch wie man den Jetracer mit dem WLAN verbindet, und dann das später für den Zugriff genutzte Programm NoMachine auf dem Jetracer installiert.
- Virtualbox Ubuntu Image
- Im Tutorial: Anleitung für die Inbetriebnahme des Controllers wird erklärt wo man das Image für den Ubuntu Controller herunterladen kann, und wie man dieses dann im Programm VMware Workstation in Betrieb nimmt. Da dies allerdings nur für einen Monat kostenlos getestet werden kann, sollte besser das kostenlose Oracle VM Virtualbox Programm genutzt werden. Dieses kann hier heruntergeladen werden. Allerdings muss zur Benutzung das Image zu einem anderen File Typen, von .vmx auf .vdi, konvertiert werden. Diese Konvertierung kann in folgenden zwei Schritten durchgeführt werden. Zuerst muss in der Testversion von VMware das .vmx File ausgewählt und dann über das Menü zu einem .ovf File exportiert werden. Danach kann man in Oracle Virtualbox das .ovf File importieren und es wird automatisch zu einem .vdi File konvertiert welches dann benutzt werden kann.
- Verbinden der beiden Parteien
- Im Tutorial: Anleitung für die Verbindung zwischen Racer und Controller ist beschrieben wie man die Verbindung zwischen der Virtual Machine und dem Roboter aufbaut. Wichtig zu beachten ist hierbei das beide Parteien im gleichen WLAN sein müssen. Der PC sollte also per LAN Kabel mit dem Router für das "Autonome Systeme" Netzwerk verbunden sein. Außerdem muss der Roboter per WLAN mit dem Netzwerk verbunden sein. Ebenfalls ist zu beachten das sich die auf beiden Seiten im /etc/hosts File eingetragenen IP Adressen ändern können, jenachdem welche Geräte mit dem Netzwerk noch verbunden sind. Nach dem Hochfahren der beiden Systeme sollten, mit dem ifconfig Befehl, die aktuellen IP Adressen gecheckt, und falls nötig im File geändert, werden.
- NoMachine
- Außerdem wurde für den Zugriff auf den Jetracer, wenn dieser nicht per HDMI an einen Monitor und an eine Tastatur sowie Maus angeschlossen war, das Programm NoMachine benutzt. Dieses Programm kann den Desktop des Roboters über das WLAN spiegeln, und erlaubt so einen kabellosen Zugriff. Hierfür muss lediglich die IP Adresse des Roboters innerhalb des WLANs im Programm angegeben werden, und dann kann eine Verbindung aufgebaut werden.
Inbetriebnahme des Roboters
- Um diesen Schritt durchzuführen muss eine SD-Karte mit einem Jetson Nano Image vorhanden sein, falls dies nicht der Fall ist wird im Abschnitt "[]" erklärt wie das Image auf der SD-Karte installiert werden kann.
- Wifi verbinden
- Remote Login
- MobaXTerm
- NoMachine Login
- IP & Hostname
- Open the robot terminal and enter the following command, check the IP and hostname of the Jetson Nano and remember that it will be used for subsequent multi-machine communication.
ifconfig #Get the IP address of the virtual machine hostname #Get the hostname of the virtual machine
- []
- Enter the command to check the WiFi name that Jetson Nano is connected to, and make the PC also connect to the same WiFi.
iwconfig wlan0 #View WiFi name
- []
Inbetriebnahme Virtuelle Maschine
- Virtuelle Maschine installieren
- The robot uses the ubuntu virtual machine as the remote control terminal, and it is more convenient and intuitive to control the robot by using various graphical tools of ROS. Here, open the Ubuntu image by VMware. VMware version should be not lower than 16.
- Download [VMware 16]
- Click to download the configured Ubuntu virtual machine image file below; if you want to configure the Ubuntu ROS system by yourself, you can refer to the advanced tutorial. It is recommended to use our configured image for the first time to avoid various problems when configuring the image yourself.
- Download [Ubuntu VM Image]
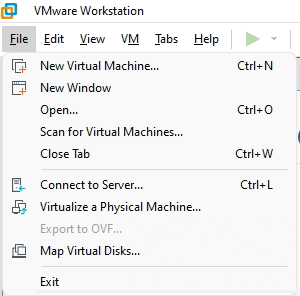
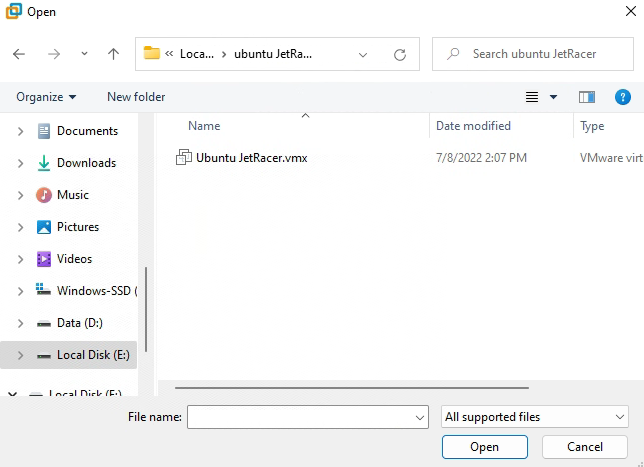
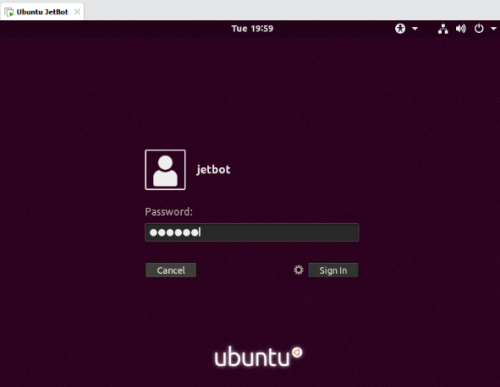
- Install and run the VMware software, click "File -> Open -> Open the downloaded <Ubuntu JetRacer.vmx>", click "Start this virtual machine" and log in, where the username and password are: jetson.
- The robot uses the ubuntu virtual machine as the remote control terminal, and it is more convenient and intuitive to control the robot by using various graphical tools of ROS. Here, open the Ubuntu image by VMware. VMware version should be not lower than 16.
- IP & Hostname
- Open the terminal or press Ctrl+Alt+t, enter the following commands to obtain the IP address and hostname of the virtual machine, and remember, the subsequent multi-machine communication will use 【Note: At this time, we need to ensure that the PC and jetson nano is connected to the same WiFi. The Ubuntu image file and PC we configured are in bridge network mode, under the same WiFi, and the virtual machine and jetson nano is in the same network segment.】



ifconfig # Gibt die IP-Adresse der virtuellen Maschine aus hostname # Gibt den Hostnamen der virtuellen Maschine aus
