Das Geheimnis der Feder: Unterschied zwischen den Versionen
| Zeile 61: | Zeile 61: | ||
=== Technischer Systementwurf === | === Technischer Systementwurf === | ||
[[Datei:Techsys.jpg| 400px |mini|Abb. 3: Technischer Systementwurf]] | [[Datei:Techsys.jpg| 400px |mini|Abb. 3: Technischer Systementwurf]] | ||
Das Escape Game „Das Geheimnis der Feder“ besteht aus mehreren integrierten Komponenten, die zusammenarbeiten (vgl. Abb. 3). Im Zentrum steht eine mechanische Anordnung - eine Feder mit einer Waagschale an einem Stativ. Der Infrarotsensor ist | Das Escape Game „Das Geheimnis der Feder“ besteht aus mehreren integrierten Komponenten, die zusammenarbeiten (vgl. Abb. 3). Im Zentrum steht eine mechanische Anordnung - eine Feder mit einer Waagschale an einem Stativ. Der Infrarotsensor ist im Stativfuß positioniert und misst die Distanz zwischen der Unterseite der Waagschale und dem Sensor. Der Arduino verarbeitet die Daten des Sensors und steuert die LED-Anzeige, die aus zwei roten LEDs, zwei gelben LEDs und einer grünen LED besteht. Die roten und gelben LEDs signalisieren Abweichungen vom optimalen Gewicht in positiver und negativer Richtung, während die grüne LED anzeigt, dass das richtige Gewicht erreicht wurde. Die gesamte Hardware wird durch einen Kasten mit Aussparung für die LEDs geschützt. Die Software wird mit Hilfe von Simulink implementiert und in Echtzeit bearbeitet. | ||
<br clear=all> | <br clear=all> | ||
Version vom 15. Januar 2025, 17:08 Uhr
→ zurück zur Übersicht: WS 24/25: Escape Game

| Autor: | Sophie Koerner & Dorothea Tege |
| Betreuer: | Prof. Göbel |
Einleitung
Escape Games haben sich als wirksame Methode zur Stärkung von Teamarbeit, Problemlösungsfähigkeiten und kritischem Denken erwiesen. Ein Beispiel dafür ist das Spiel „Das Geheimnis der Feder“ (vgl. Abb. 1). Es stellt die Teilnehmenden vor die Herausforderung, eine präzise Gewichtsbalance zu ermitteln und die Funktionsweise eines sensorgesteuerten Systems zu testen.
Das Spiel konzentriert sich auf eine mechanische Anordnung. Eine Feder ist an einem Stativ befestigt, an dem eine Waagschale hängt. Die Spieler müssen die optimale Masse bestimmen und auf die Waagschale legen, um ein stabiles Gleichgewicht zu erreichen. So wird experimentell das Hooke‘ sche Gesetz getestet.
Eine LED-Anzeige liefert visuelle Rückmeldungen. Zwei rote und gelbe LEDs signalisieren Abweichungen vom optimalen Gewicht. Eine grüne LED zeigt an, dass die gewünschte Position mit der richtigen Masse erreicht wurde. Ein Infrarotsensor misst die Distanz zwischen der Unterseite der Waagschale und dem Sensor. Ziel des Spiels ist es, das exakte Gewicht zu identifizieren, das die optimale Balance im System sichert.
Das Escape Game „Das Geheimnis der Feder“ ist Teil einer Reihe von miteinander verknüpften Spielen. Das Lösen eines Spiels ist notwendig, um auf die nachfolgenden Herausforderungen zugreifen zu können, welche ebenfalls im Modul "Angewandte Mechanik" entwickelt wurden (WS 24/25: Escape Game). Dieses Konzept fördert die kognitive Flexibilität und die Zusammenarbeit innerhalb der Gruppe.
Anforderungen
Die Anforderungstabelle spezifiziert die funktionalen, technischen und systemischen Eigenschaften, die für die Entwicklung und den Betrieb des Systems „Das Geheimnis der Feder“ erfüllt werden müssen (vgl. Tab. 1). Diese Anforderungen bilden die Grundlage für die strukturierte Umsetzung des Projekts und gewährleisten sowohl die technische Machbarkeit als auch die Anwenderfreundlichkeit. Sie berücksichtigen dabei die Interaktion zwischen der Hardware und Software sowie die präzise Erfüllung der Projektziele. Im Folgenden werden die Anforderungen systematisch dargestellt.
| ID | Inhalt | Prio | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|
| 1 | Das Escape-Game muss in 5 min lösbar sein. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 2 | Der verbaute Sensor muss eine Distanz messen können. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 3 | Die Distanz zur Waagschale wird durch ein LED-Ampelsystem visualisiert. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 4 | Wenn das gewählte Gewicht korrekt ist, leuchtet die LED in grün. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 5 | Das Experiment kann entweder durch Ausprobieren (leicht) oder Berechnen (mittel) erfolgen. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 6 | Das Experiment darf nur mit den gegebenen Hilfsmitteln bearbeitet werden: Zettel, Stift und Taschenrechner. | Mittel | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 7 | Das System muss anwenderfreundlich sein. | Mittel | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 8 | Die Steuerung des Arduino-Systems erfolgt über Simulink und muss ohne Verzögerung und zuverlässig funktionieren. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 9 | Das Escape-Game muss in einen Schuhkarton passen. | Mittel | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
Funktionaler Systementwurf/Technischer Systementwurf
Im Anschluss an die Materialliste werden der funktionale und der technische Systementwurf des Projekts erläutert. Der funktionale Systementwurf spezifiziert die angestrebten Funktionen und Interaktionen des Systems. Der technische Systementwurf hingegen beschreibt die Realisierung dieser Funktionen auf Basis der Hardware- und Softwarekomponenten. Beide Entwürfe stellen wesentliche Grundlagen für die systematische Entwicklung und Validierung des Gesamtsystems dar.
Funktionaler Systementwurf

Für das Escape Game „Das Geheimnis der Feder“ wird eine Feder an einem Stativ befestigt und eine Waagschale darunter gehängt. Spieler müssen die optimale Masse ermitteln, entweder durch Ausrechnen der angegebenen Formel (Schwierigkeitsgrad Mittel) oder mit einem leichten Schwierigkeitsgrad durch Ausprobieren mit Gewichten, die auf die Waagschale gelegt werden (vgl. Abb. 2). Das System beinhaltet eine LED-Anzeige, die visuelle Rückmeldungen in Form von roten, gelben und grünen LEDs gibt. Die grüne LED zeigt den korrekten Bereich an. Die gelben und roten LEDs werden verwendet, um Abweichungen vom optimalen Gewicht zu signalisieren. Ein Ultraschallsensor misst kontinuierlich die Distanz zwischen der Unterseite der Waagschale und dem Sensor.
Technischer Systementwurf

Das Escape Game „Das Geheimnis der Feder“ besteht aus mehreren integrierten Komponenten, die zusammenarbeiten (vgl. Abb. 3). Im Zentrum steht eine mechanische Anordnung - eine Feder mit einer Waagschale an einem Stativ. Der Infrarotsensor ist im Stativfuß positioniert und misst die Distanz zwischen der Unterseite der Waagschale und dem Sensor. Der Arduino verarbeitet die Daten des Sensors und steuert die LED-Anzeige, die aus zwei roten LEDs, zwei gelben LEDs und einer grünen LED besteht. Die roten und gelben LEDs signalisieren Abweichungen vom optimalen Gewicht in positiver und negativer Richtung, während die grüne LED anzeigt, dass das richtige Gewicht erreicht wurde. Die gesamte Hardware wird durch einen Kasten mit Aussparung für die LEDs geschützt. Die Software wird mit Hilfe von Simulink implementiert und in Echtzeit bearbeitet.
Materialliste
Die Materialliste für das Projekt „Das Geheimnis der Feder“ umfasst alle notwendigen Komponenten für die Konstruktion und den Betrieb (vgl. Tab. 2). Dazu gehören elektronische und mechanische Bauteile sowie ergänzende Hilfsmaterialien. Sie umfasst elektronische Bauteile sowie mechanische Elemente. Ergänzt wird dies durch Hilfsmaterialien. Die Interaktion der Hardware mit der Software erfolgt über Simulink, das für die Systemsteuerung genutzt wird. Diese Liste gewährleistet das Vorhandensein aller notwendigen Elemente für die Funktionalität und Umsetzung des Projekts.
| Nr. | Anz. | Beschreibung |
|---|---|---|
| 1 | 1 | Funduino Arduino UNO R3 |
| 2 | 1 | IR-Abstandssensor Sharp GP2Y0A21SK0F |
| 3 | 3 | Widerstand 200Ohm |
| 4 | 1 | Steckbrett |
| 5 | 4 | Jumper Kabel männlich/weiblich, 20cm |
| 6 | X | Jumper Kabel männlich/männlich, 20cm |
| 7 | 5 | LEDs (2x rot, 2x gelb, 1x grün) |
| 8 | 1 | Stativfuß (Holz) |
| 9 | 1 | Stativstange 40 cm, 10 mm Durchmesse |
| 10 | 1 | Muffenblock |
| 11 | 1 | Steckachse |
| 12 | 2 | Schraubenfeder 25 N/m (inkl. Ersatzfeder) |
| 13 | 2 | Wägesatz 1g bis 50g |
| 14 | 1 | Waagschale (3D gedruckt) |
| 15 | 1 | Computer mit Simulink und USB-Anschluss für Arduino |
| 16 | 1 | USB-Kabel |
| 17 | 1 | Steckverbindung für Stativstange (3D gedruckt) |
Komponentenspezifikation
Im Rahmen der Entwicklung des Systems „Das Geheimnis der Feder“ ist eine detaillierte Spezifikation der einzelnen Komponenten notwendig, um deren Funktionen, Anforderungen und Interaktionen im Gesamtsystem zu beschreiben. Die folgende Komponentenspezifikation dient dazu, die eingesetzten Elemente systematisch darzustellen und ihre spezifischen Eigenschaften sowie Aufgaben innerhalb des Projekts zu erläutern.
Stückliste (BOM)
Die Bill of Materials, in Tabelle 3 aufgelistet, befindet sich in der Dokumentation, diese ist in der Zusammenfassung hinterlegt.
| Tabelle 3: Stückliste | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|











Technische Daten des Sensors

Die technischen Daten des Sharp GP2Y0A21YK0F Sensors [3] liefern wichtige Informationen (vgl. Tab. 4). Diese Informationen betreffen den Einsatzbereich und die Anforderungen, die bei der Integration in eine Messumgebung berücksichtigt werden müssen. Dieser analoge Infrarot-Abstandssensor, entwickelt von der Firma Sharp, misst Entfernungen im Bereich von 10 cm bis 80 cm. Dabei nutzt der Sensor eine Infrarot-Lichtquelle und einen Photodetektor, um den Abstand zu einem Objekt zu berechnen. Das Ausgangssignal ist analog und variiert in Abhängigkeit von der gemessenen Entfernung.
| Messbereich | 10 cm bis 80 cm |
| Ausgang | Analog (Spannungssignal) |
| Versorgungsspannung | 4,5 V bis 5,5 V |
| Stromverbrauch | Maximal 30 mA bei 5 V |
| Reaktionszeit | ca. 39 ms |
| Betriebstemperatur | -10 °C bis +60 °C |
| Abmessungen | 29,5 x 13 x 13,5mm |
Der Sensor verfügt über drei Pins:
- 5V (Vcc)
- Ground (GND)
- Analogen Ausgang (Vout)
Aufgrund seiner präzisen Messung und der einfachen Integration eignet er sich besonders für die Anwendung in der Abstandsmessung der Waagschale in diesem Projekt.
Funktionsweise und Kalibrierung des Sensors
Der IR-Abstandssensor Sharp GP2Y0A21YK0F basiert auf dem Prinzip der Infrarot-Reflexion. Dabei sendet der Sensor ein Infrarotlicht aus, das von der Oberfläche eines Objekts reflektiert wird. Die Zeit, die das Licht für den Hin- und Rückweg benötigt, wird vom Sensor gemessen, wodurch der Abstand zum Objekt berechnet werden kann.
Die Kalibrierung des Sensors ist entscheidend, um die Genauigkeit der Messergebnisse sicherzustellen. Unterschiedliche Reflexionseigenschaften von Oberflächen, Materialien und Lichtverhältnisse können die Messwerte beeinflussen. Für eine präzise Kalibrierung werden folgende Schritte durchgeführt:
- Messung von Referenzabständen: Bekannte Distanzen werden mithilfe eines Lineals oder eines anderen Messgeräts eingestellt, und die entsprechenden Ausgangswerte des Sensors werden aufgezeichnet.
- Erstellung einer Lookup-Tabelle: Die gemessenen analogen Ausgangswerte werden in einer Tabelle den entsprechenden Distanzen zugeordnet. Diese Tabelle dient später zur Umrechnung der analogen Werte in reale Abstände.
- Fehleranalyse: Die Ergebnisse werden überprüft, um Abweichungen zu erkennen und mögliche Fehlerquellen, wie Unebenheiten oder Lichtverhältnisse, zu minimieren.
- Validierung: Die Kalibrierung wird durch wiederholte Messungen und Vergleiche mit den erwarteten Werten validiert.
Dieser Kalibrierungsprozess gewährleistet, dass der IR-Sensor unter den spezifischen Bedingungen des Escape Games zuverlässig und präzise arbeitet.
Umsetzung der Hardware

Für die Realisierung des Escape Games „Das Geheimnis der Feder“ wird die Hardware auf mechanischen Bauelementen aufgebaut und mit 3D-gedruckten Bauteilen optimiert und geschützt, die zuvor mit SolidWorks entworfen wurden.
Mechanischer Aufbau der Hardware
Um das Escape Game praktisch umzusetzen, muss zunächst der mechanische Aufbau realisiert werden. Hierfür werden die Teile 9 bis 15 aus der Materialliste zu einem Galgen, wie in der Skizze in Abbildung 19 dargestellt, zusammengebaut.
Der Stativfuß wird auf einer ebenen Fläche positioniert. In die Grundplatte wurde vorab eine Vertiefung gefräst, in der der IR-Sensor eingelassen und fest verschraubt wird. Die Oberseite des Stativfußes wird so angepasst, dass sie bündig mit der Oberfläche des Sensors abschließt und eine einheitliche Ausgangshöhe bildet.
In eine zweite Bohrung wird die Stativstange eingeführt und fixiert. Optional kann die Stativstange zur Optimierung des Aufbaus in zwei Segmente geteilt werden. Ein 3D-gedrucktes Steckelement dient als Verbindungsstück und ist als Ersatzteil verfügbar. Am oberen Ende der Stativstange wird ein Muffenblock montiert, an dem die Steckachse befestigt wird. An der Achse wird eine Feder mit der daran angebrachten Waagschale montiert. Die Waagschale muss dabei exakt mittig über dem IR-Sensor positioniert werden, um präzise Messergebnisse zu gewährleisten.
Nach Abschluss des mechanischen Aufbaus werden die technischen Komponenten montiert. Der analoge Sensor IR-Sharp GP2Y0A21YK0F wird in die vorbereitete Vertiefung des Stativfußes eingesetzt. Die Kabel des Sensors werden versteckt unterhalb der Grundplatte geführt und zum Steckbrett geleitet, das sich am hinteren Ende des Stativfußes befindet. Auf diesem Steckbrett wird die Schaltung für den Sensor sowie die LED-Anzeige implementiert. Diese Anzeige dient als visuelle Rückmeldung für die Position der Waagschale und das Gewicht.
3D-Modelle und ihre Funktion
Für die Konstruktion und den Schutz der Hardware wurden drei spezifische 3D-Modelle entwickelt und mittels eines 3D-Druckers gefertigt. Jedes dieser Modelle erfüllt, wie in Tabelle 5 aufgelistet, eine klar definierte Funktion im Gesamtsystem:
| Komponente | Funktion | Konstruktion | Technische Zeichnung |
|---|---|---|---|
| Gehäuse | Das Gehäuse dient dem Schutz des Arduino und der Lötplatine vor mechanischen Beschädigungen sowie äußeren Einflüssen. | Wandstärke: 5 mm, um eine ausreichende Stabilität und Robustheit zu gewährleisten. Abmessungen: 130 mm x 178 mm x 27 mm. Montage: Vier Erweiterungen ermöglichen die Befestigung am Stativfuß. Hierfür werden M5-Linsensenkschrauben verwendet, die für eine sichere Verbindung sorgen. LED-Öffnung: An der Oberseite befindet sich eine längliche Öffnung mit den Maßen 15 mm, durch die die fünf LEDs in Reihe sichtbar sind. Dies erlaubt eine einfache visuelle Überwachung der Zustände. |
 |
| Waagschale | Die Waagschale ist speziell so gestaltet, dass sie die notwendigen Gewichte aufnehmen und stabil halten kann, ohne die Funktionalität zu beeinträchtigen. | Wandstärke: 3 mm, was eine Balance zwischen Stabilität und Leichtigkeit bietet. Abmessungen: Gesamtdurchmesser von 81,01 mm und eine Höhe von 15 mm. Bodenfläche: Der Boden der Waagschale besitzt einen Durchmesser von 60 mm, um eine ausreichende Auflagefläche für die Gewichte zu bieten. Montagepunkte: Drei Montagelöcher mit einem Durchmesser von 4 mm und einer Tiefe von 4 mm ermöglichen die sichere Befestigung am Federmechanismus. |
 |
| Verbindungsstück | Das Verbindungsstück dient der Verbindung von zwei Segmenten einer geteilten Stativstange. Dies ist insbesondere dann erforderlich, wenn die ursprüngliche Stativstange für den Aufbau zu groß ist. | Gesamtlänge: 140 mm, um eine stabile Verbindung zwischen den Stangensegmenten zu gewährleisten. Anpassung: Das Verbindungsstück wurde speziell für diese Funktion entwickelt und aus robustem Material gefertigt, das die Belastungen durch die Stativstange und den daran befestigten Komponenten trägt. |
 |
Sicherheitsmerkmale:
Alle konstruierten 3D-Modelle verfügen über abgerundete Kanten mit einem Radius von 0,2 mm. Diese Maßnahme dient der Vermeidung von Verletzungen während der Montage und Handhabung der Komponenten.
Mechanische und funktionale Integration: Die Kombination dieser 3D-Modelle mit den technischen und mechanischen Komponenten stellt sicher, dass das System sowohl stabil als auch zuverlässig funktioniert. Der Schutz der Hardware und die benutzerfreundliche Handhabung stehen dabei im Vordergrund, um die Anforderungen des Escape Games optimal zu erfüllen.
Stativfuß
Der Stativfuß besteht aus einem sorgfältig bearbeiteten und lackierten Holzstück, das den mechanischen Anforderungen des Systems gerecht wird. Um eine hohe Stabilität und eine präzise Messgrundlage zu gewährleisten, wurden folgende Schritte bei der Herstellung durchgeführt:
- Materialbearbeitung: Das Holzstück wurde präzise gefräst, geschliffen und anschließend lackiert. Diese Maßnahmen dienen nicht nur der ästhetischen Gestaltung, sondern auch dem Schutz des Materials vor Umwelteinflüssen wie Feuchtigkeit oder mechanischer Abnutzung.
- Integration des IR-Sensors: Der IR-Sensor wurde so in den Stativfuß eingelassen, dass er bündig mit der Oberfläche abschließt. Diese Bauweise minimiert mögliche Messabweichungen durch unerwünschte Bewegungen oder Fehlstellungen und schafft eine stabile Ausgangsposition für alle Messungen (vgl. Abb. 23-24).
Durch diese Konstruktion wird eine Kombination aus Funktionalität, Stabilität und Präzision erreicht, die für den Betrieb des Systems unerlässlich ist.
-
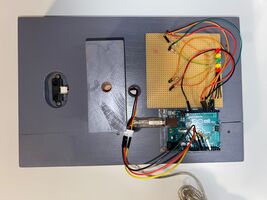 Abb. 23: Stativfuß von der Oberseite
Abb. 23: Stativfuß von der Oberseite -
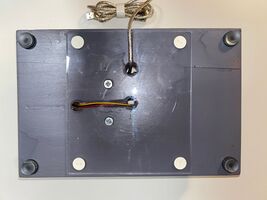 Abb. 24: Stativfuß von der Unterseite
Abb. 24: Stativfuß von der Unterseite


Elektrischer Aufbau der Hardware
Der elektrische Aufbau des Projekts wurde systematisch dokumentiert und visualisiert. Der Verdrahtungsplan, erstellt mit Fritzing, bietet eine detaillierte Darstellung der physischen Verbindungen und unterstützt die Nachvollziehbarkeit der Hardwareintegration (vgl. Abb. 25). Ergänzend wurde der Schaltplan mithilfe von Multisim erstellt, um die logischen Zusammenhänge und elektrischen Eigenschaften der Schaltung präzise abzubilden (vgl. Abb. 26). Beide Pläne zusammen liefern eine umfassende und präzise Dokumentation der Hardware des Projekts und gewährleisten eine klare technische Darstellung des Systems.
-
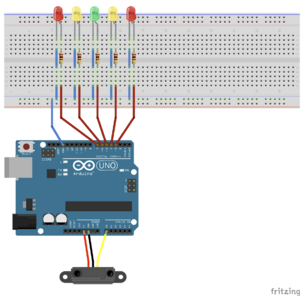 Abb. 25: Verdrahtungsplan in Fritzing
Abb. 25: Verdrahtungsplan in Fritzing -
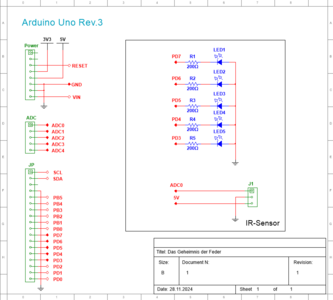 Abb. 26: Schaltplan in Multisim
Abb. 26: Schaltplan in Multisim


Aufbau des LED-Systems
- Anzahl der LEDs: Der Plan umfasst fünf Leuchtdioden (LEDs), die zur visuellen Signalisierung des Systems dienen.
- Widerstände: Jede LED ist mit einem 200 Ohm Widerstand in Reihe geschaltet, um den Stromfluss zu begrenzen und die LEDs vor Überlastung zu schützen.
- Anschluss am Arduino:
- Die Steuerung der LEDs erfolgt über die digitalen Pins 3 bis 7 des Arduino Uno.
- Die Kathoden der LEDs sind mit dem GND-Pin (Masse) des Arduino verbunden.
Integration des Infrarotsensors
- Anschlusskonfiguration: Der IR-Sensor ist über drei Pins mit dem Arduino verbunden:
- GND für die Masseverbindung
- 5V für die Spannungsversorgung
- A0 als analoger Eingang zur Übertragung des Sensorsignals
- Verkabelung: Die Verbindung des Sensors erfolgt direkt über Kabel, was eine schnelle und effiziente Integration sicherstellt.
- Anschlusskonfiguration: Der IR-Sensor ist über drei Pins mit dem Arduino verbunden:
Lötstreifenplatine
- Montage der Bauteile:
- Die LEDs und die zugehörigen Widerstände sind auf einer Lötstreifenplatine angebracht, die eine stabile und dauerhafte Verbindung der Bauteile gewährleistet.
- Die Platine ist über Drahtverbindungen mit den entsprechenden Pins des Arduino Uno verbunden.
- Funktionalität: Die Platine dient als zentrale Einheit zur Steuerung der LEDs, wodurch ein geordneter und sicherer Aufbau des Systems ermöglicht wird.
- Montage der Bauteile:
Sicherstellung der Funktionalität
- Die Kombination von Lötstreifenplatine und direkter Verkabelung ermöglicht eine stabile und zuverlässige Funktion aller Komponenten.
- Der Aufbau wurde so konzipiert, dass alle Bauteile effizient miteinander interagieren und die fehlerfreie Ausführung der vorgesehenen Funktionen gewährleistet ist.
Umsetzung der Software
Die Software wird mit Matlab Simulink entwickelt, getestet und anschließend auf die Hardware geladen, um eine zuverlässige und fehlerfreie Funktionalität sicherzustellen. Die Steuerung des Systems erfolgt mithilfe von Matlab Simulink, das auf einem angeschlossenen Computer ausgeführt wird. Simulink übernimmt die Datenverarbeitung der Sensorsignale und steuert die LED-Anzeige. Die folgenden Hauptkomponenten sind dabei entscheidend:
Signalverarbeitung
Die Sensorsignale werden erfasst, digitalisiert und gefiltert, um letztendlich die Distanz zu berechnen.
- Erfassung der Sensorsignale: Der IR-Sensor gibt analoge Ausgangswerte aus, die vom Arduino-Controller eingelesen werden.
- Analog-Digital-Wandlung: Der Arduino wandelt die analogen Signale in digitale Werte um und überträgt diese über eine serielle Schnittstelle an Simulink.
- Signalfilterung: In Simulink werden die Messwerte durch einen Tiefpassfilter verarbeitet, um Störsignale zu eliminieren und die Datenqualität zu verbessern.
- Distanzberechnung: Die Umrechnung der gefilterten Sensorwerte in reale Distanzen erfolgt über einen Lookup-Table. Dieser wurde vorab durch eine Kalibrierung erstellt und ordnet jedem analogen Signalwert eine spezifische Distanz zu.
- Erfassung der Sensorsignale: Der IR-Sensor gibt analoge Ausgangswerte aus, die vom Arduino-Controller eingelesen werden.
LED-Steuerung
Die LED-Anzeige dient der visuellen Rückmeldung der Messungen und basiert auf den berechneten Distanzen. Die Steuerung erfolgt wie folgt:
- Rote LEDs: Werden aktiviert, wenn das gemessene Gewicht zu groß oder zu klein ist.
- Gelbe LEDs: Leuchten, wenn das Gewicht im Bereich der Annäherung liegt.
- Grüne LED: Signalisiert das Erreichen des optimalen Gewichts.
Die Steuerungslogik wird in Simulink durch einen MATLAB-Funktionsblock umgesetzt, der die berechneten Distanzen mit vordefinierten Schwellenwerten vergleicht und die entsprechenden LEDs aktiviert.
Echtzeitfähigkeit
Das System wurde für Echtzeitbetrieb optimiert:
- Minimierung von Latenzen: Die gesamte Signalverarbeitung und LED-Steuerung erfolgt ohne wahrnehmbare Verzögerungen.
- Effiziente Kommunikation: Simulink und der Arduino kommunizieren über optimierte Support-Pakete, die eine schnelle Datenübertragung sicherstellen.
- Schnelle Reaktionszeiten: Messungen und Rückmeldungen erfolgen unmittelbar und erlauben eine direkte Benutzerinteraktion.
Programmablauf
Der dargestellte Ablaufplan in Abbildung 27 beschreibt die systematische Funktionsweise des Projekts. Zu Beginn erfolgt eine kontinuierliche Abfrage des Sensors, um analoge Eingangssignale zu erfassen. Diese Sensorsignale werden anschließend in Abstandssignale umgewandelt, welche die gemessene Distanz widerspiegeln. Daraufhin wird bestimmt, in welchem Bereich sich die ermittelte Distanz befindet – ob das Gewicht zu leicht, passend oder zu schwer ist. Basierend auf dieser Bewertung wird die entsprechende LED angesteuert, wobei die Farbgebung (rot, gelb, grün) eine visuelle Rückmeldung liefert. Der Prozess läuft zyklisch, bis die optimale Gewichtskonfiguration erreicht ist.
-
 Abb. 27: Programmablaufplan
Abb. 27: Programmablaufplan

Simulink-Modell
Das vorgestellte System misst die Distanz mithilfe eines IR-Sensors und steuert LEDs entsprechend. Die folgende Tabelle 6 fasst die einzelnen Komponenten des Simulink-Modells und die zugehörigen Software-Details zusammen. Das gesamte Simulink Modell ist in Abbildung 28 dargestellt.
| Komponente | Beschreibung (Simulink-Modell) | Beschreibung (Software-Details) | |
|---|---|---|---|
| Sensor-Integration | Der analoger Eingang „IR_Signal_roh“ liest kontinuierlich die IR-Sensorsignale ein und reduziert mit dem Median-Filter Störungen. | Der Simulink-Block liest analoge Sensorsignale ein und überträgt sie weiter. | |
| Distanzberechnung | Analogwerte werden anhand einer Lookup-Tabelle in Distanzen umgerechnet. | Anhand einer vorab kalibrierten Lookup-Tabelle werden die analogen Werte in reale Distanzen umgewandelt. | |
| LED-Steuerung | Der Matlab-Funktionsblock „ControlLED“ ordnet die berechneten Distanzen den LEDs zu (vgl. controlLED.m). Vergleichsoperationen bestimmen, ob die Distanz in einem optimalen Bereich liegt. Die entsprechenden LEDs werden danach aktiviert. | Eine Logikschaltung in Simulink aktiviert die LEDs auf Basis der berechneten Distanzen. Schwellenwerte definieren die Zuordnung zu Rot, Gelb oder Grün. |
Zusätzliche Informationen: Die modulare Struktur des Simulink-Modells ermöglicht eine einfache Anpassung an spezifische Anforderungen. Die Software nutzt Arduino-Support-Pakete für die Hardware-Integration.

%***************************************************************************
% Hochschule Hamm-Lippstadt *
%***************************************************************************
% Modul : controlLED.m *
% *
% Datum : 25.10.2024 *
% *
% Funktion : Ansteuern von 5 LEDs in Abhaengigkeit des *
% Abstands zwischen Sensor und Waagschale *
% *
% Implementation : MATLAB 2024a *
% *
% Req. Toolbox : - *
% *
% Author : Dorothea Tege, Sophie Koerner *
% *
% Letzte Änderung : 11.01.2025 *
%***************************************************************************
function [LED1, LED2, LED3, LED4, LED5] = controlLED(sensorValue)
% Inputs:
% sensorValue: Wert des Sensors zwischen <=1.60*10^-5 und >=1.90*10^-5
%
% Outputs:
% LED1, LED2, LED3, LED4, LED5: 0 (aus) oder 255 (an)
% Standardmäßig alle LEDs aus
[LED1, LED2, LED3, LED4, LED5] = deal(0, 0, 0, 0, 0);
% Abstandsbereiche für die LEDs
if sensorValue <= 1.58*10^-5 % Abstand der Schale am geringsten, Gewicht am hoechsten
[LED1, LED2, LED3, LED4, LED5] = deal(255, 0, 0, 0, 0); % Nur LED1 (rot) an
elseif sensorValue <= 1.61*10^-5
[LED1, LED2, LED3, LED4, LED5] = deal(0, 255, 0, 0, 0); % Nur LED2 (gelb) an
elseif sensorValue <= 1.64*10^-5
[LED1, LED2, LED3, LED4, LED5] = deal(0, 0, 255, 0, 0); % Nur LED3 (gruen)an
elseif sensorValue <= 1.70*10^-5
[LED1, LED2, LED3, LED4, LED5] = deal(0, 0, 0, 255, 0); % Nur LED4 (gelb) an
elseif sensorValue > 1.70*10^-5 % Abstand der Schale am hoechsten, Gewicht am geringsten
[LED1, LED2, LED3, LED4, LED5] = deal(0, 0, 0, 0, 255); % Nur LED5 (rot) an
end
end
Komponententest
Die Komponententests sind dafür da, die gestellten Anforderungen zu überprüfen und gegebenenfalls Verbesserungen vornehmen zu können. Erst, wenn alle Komponenten getestet wurden und wie gefordert funktionieren, können die Anforderungen als erfüllt eingestuft werden. In der unten stehenden Tabelle 7 sind die Anforderungen aus Tabelle 1 erneut aufgeführt. Mit Hilfe von gezielten Tests wird die Erfüllung der einzelnen Anforderungen getestet und bewertet. Die Tests werden vom Erstprüfer durchgeführt und vom Zweitprüfer erneut kontrolliert.
Insgesamt werden alle Anforderungen erfüllt. Jeglich bei der Anforderung 8 kommt es zu einem Konflikt. Es werden für den Versuch konstante Werte benötigt, die durch Anwendung des Medianfilters erreicht werden können. Hierdurch entsteht eine kleine Verzögerung bei der Ansteuerung der LEDs. Der Medianfilters wurde so optimiert, dass das Signal zwar geglättet wird, jedoch die Verzögerung möglichst gering gehalten wird.
| ID | Komponente | Anforderung | Testdurchführung | Testergebnis | Erstprüfer | Zweitprüfer | Anforderung erfüllt |
|---|---|---|---|---|---|---|---|
| 1 | gesamter Aufbau | Das Escape-Game muss in 5 min lösbar sein | Game wird nach Vorgabe getestet | Das Escape-Game ist innerhalb von 5 min lösbar | Dorothea Tege | Sophie Koerner | Ja |
| 2 | IR-Sensor | Der verbaute Sensor muss eine Distanz messen können | Sensor wird über den Arduino UNO R3 mit Matlab Simulink verbunden. Der Sensor wird unterhalb der Waagschale positioniert. Der Abstand zwischen Waagschale und Sensor wird variiert. | Der Sensor gibt einen distanzabhängigen Wertaus. Dieser kann in Simulink weiter verarbeitet werden. | Dorothea Tege | Sophie Koerner | Ja |
| 3 | Matlab-Funktion, Platine | Die Distanz zur Waagschale wird durch ein LED-Ampelsystem visualisiert | Die gelötete Platine wird nach Vorgabe an den Arduino UNO R3 angeschlossen. Das Simulink Modell inklusive Matlab-Funktion wird gestartet | Die LEDs können in Abhängigkeit der aktuellen Distanz angesteuert und visualisiert werden. | Sophie Koerner | Dorothea Tege | Ja |
| 4 | Matlab-Funktion, Platine | Wenn das gewählte Gewicht korrekt ist, leuchtet die LED in grün. | Das gesuchte Gewicht (170g) wird in die Waagschale gelegt. | Wenn in der Waagschale 170g liegen, leuchtet die grüne LED konstant. | Sophie Koerner | Dorothea Tege | Ja |
| 5 | gesamter Aufbau | Das Experiment kann entweder durch Ausprobieren (leicht) oder Berechnen (mittel) erfolgen. | Beide Lösungsmöglichkeiten werden getestet. | Mit beiden Lösungsmöglichkeiten ist das lösen des Rätsels möglich | Sophie Koerner; Dorothea Tege | Dorothea Tege; Sophie Koerner | Ja |
| 6 | Berechnung der Lösung | Das Escape-Game darf nur mit den gegebenen Hilfsmitteln bearbeitet werden: Zettel, Stift und Taschenrechner. | Die Berechnung wird mit den gegebenen Hilfsmitteln getestet. | Das Escape-Game kann mit Hilfe der gegebenen Hilfsmittel gelöst werden. | Dorothea Tege | Sophie Koerner | Ja |
| 7 | gesamte System | Das System muss anwenderfreundlich sein. | Das Spiel wird getestet. | Das Spiel bedarf in der leichten Version keine Vorkenntnisse und kann ohne Vorbereitungen begonnen werden. Nicht nur die farbliche Wahl der LEDs, sondern auch die Anordnung dieser ermöglicht die schnelle Visualisierung. Dadurch ist das System anwenderfreundlich. | Dorothea Tege | Sophie Koerner | Ja |
| 8 | Matlab Simulink | Die Steuerung des Arduino-Systems erfolgt über Simulink und muss ohne Verzögerung und zuverlässig funktionieren. | Das Modell wird gestartet und der Versuchsablauf getestet | Der Arduino wird durch Matlab Simulink angesteuert und funktioniert zuverlässig. Durch die Verwendung des Medianfilters kommt es zu minimalen Verzögerungen, welche jedoch so optimiert wurden, dass die Messwerte stabil bleiben, die Verzögerung aber nicht zu groß wird. | Sophie Koerner | Dorothea Tege | Ja |
| 9 | gesamte System | Das Escape-Game muss in einen Schuhkarton passen. | Das Modell wird auseinander gebaut und in einen Schuhkarton gelegt | Das Escape-Game passt in einen Schuhkarton | Sophie Koerner | Dorothea Tege | Ja |
Berechnung des Gewichts
Das Escape Game „Das Geheimnis der Feder“ kann, wie bereits beschrieben, auf zwei verschiedene Arten gelöst werden: durch experimentelles Ausprobieren der Gewichte oder durch eine rechnerische Herleitung des optimalen Gewichts. Im Folgenden wird die mathematische Berechnung des Gewichts detailliert erläutert, um die theoretische Grundlage für die Lösung des Spiels aufzuzeigen.
Ein Stativ mit einer Feder und einer Waagschale ist aufgebaut. Die Feder hat eine Federkonstante von N/m. Ein Ultraschallsensor misst die Distanz zwischen der Unterseite der Waagschale und dem Sensor. Der Sensor wurde so kalibriert, dass er im Ruhezustand der Feder (ohne Gewicht) eine Distanz von m misst.
Wenn ein Gewicht auf die Waagschale gelegt wird, dehnt sich die Feder, und die Distanz verringert sich. Die Beziehung zwischen der Gewichtskraft , der Federkraft und der Auslenkung der Feder lautet:
Die Auslenkung ergibt sich aus der Differenz , wobei die Erdbeschleunigung m/s2 ist.
Aufgabe
Die grüne LED leuchtet, wenn der Sensor eine Distanz von m misst. Berechnen Sie die Masse m, die auf die Waagschale gelegt werden muss, damit die grüne LED leuchtet. Geben Sie Ihr Ergebnis in Gramm an.
Gegebene Parameter:
N/m
m/s2
m
m
Gegebene Formeln:
| Lösung |
| m |
| N |
| N |
| Fehler beim Parsen (Syntaxfehler): {\displaystyle ⇔ m = \frac {F_G}{g} = \frac {1,6684}{9,81} = 0,1700 } kg g |
| Ergebnis: Die Masse, die auf die Waagschale gelegt werden muss, beträgt exakt 170 g. |
Ergebnis
Das Projekt “Das Geheimnis der Feder” wurde erfolgreich umgesetzt und erfüllt die gestellten Anforderungen. Dieses Konzept vermittelte physikalische Prinzipien wie das Hooke’sche Gesetz auf spielerische und interaktive Weise. Die Kombination aus mechanischer Konstruktion, sensorgesteuertem System und visueller Rückmeldung durch LEDs erwies sich als effektives Ansatz. Ein wesentlicher Erfolg des Projekts lag in der Integration aller Komponenten. Die mechanischen Bauteile waren stabil und funktionsfähig, der elektrische Aufbau zuverlässig, und die Simulink-Software verarbeitete Daten schnell und fehlerfrei. Die Kalibrierung des IR-Sensors war ein wichtiger Bestandteil des Systems, denn sie ermöglichte präzise Messungen unter verschiedenen Bedingungen. Dadurch lieferte der Sensor zuverlässige Daten zur Position der Waagschale, die in Echtzeit verarbeitet und durch das LED-System klar visualisiert wurden. Grüne LEDs signalisierten die korrekte Masse bei 170g, während rote und gelbe LEDs Abweichungen anzeigten. Trotz kleiner Verzögerungen durch den Medianfilter blieb die Reaktionsfähigkeit des Systems insgesamt hoch und erfüllte die Anforderungen an ein interaktives Escape-Game vollständig. Auch die zweite Möglichkeit das Gewicht mittels Berechnung herzuleiten ist mit den angegebenen Parametern und Formeln gut zu lösen. Auch die zweite Möglichkeit, das Gewicht mittels Berechnung herzuleiten, ist mit den angegebenen Parametern und Formeln klar und problemlos umzusetzen.
Zusammenfassung
Das Projekt “Das Geheimnis der Feder” setzte erfolgreich physikalische Konzepte in einem interaktiven Spiel um. Es verfolgte sowohl lehrreiche als auch unterhaltsame Ziele. Die Kombination aus mechanischen, elektrischen und softwarebasierten Komponenten führte zu einem funktionierenden System, das optimal auf die Anforderungen eines Escape Games abgestimmt war. Die mechanische Konstruktion wurde durch präzise Kalibrierung des IR-Sensors und den Einsatz 3D-gedruckter Bauteile ergänzt, wodurch sowohl die Funktionalität als auch die Anwenderfreundlichkeit gesteigert wurden. Die Softwareintegration durch Simulink gewährleistete eine zuverlässige Datenverarbeitung in Echtzeit und Steuerung der LEDs. Herausforderungen wie Lieferengpässe und die Verzögerungen durch den Median-Filter konnten durch flexible Anpassungen erfolgreich gemeistert werden. Die erfolgreiche Umsetzung des Projekts verdeutlicht die Bedeutung einer durchdachten Planung, die jedoch Raum für spontane Anpassungen lässt.
Lessons Learned
Planung und Flexibilität: Die Projektplanung ist entscheidend für den Projektverlauf, aber Flexibilität im Umgang mit unerwarteten Lieferproblemen ist genauso wichtig. Pufferzeiten und alternative Strategien sind unverzichtbar.
Technische Herausforderungen: Die Kalibrierung des IR-Sensors war entscheidend für die Genauigkeit des Systems. Durch wiederholende Tests und Validierungen konnte eine präzise und stabile Messfunktion erreicht werden. Dies verdeutlicht die Bedeutung einer sorgfältigen Komponentenprüfung und -kalibrierung.
Teamarbeit und Kommunikation: Die Teamarbeit war entscheidend für die schnelle Problemlösung und den Projektfortschritt. Klare Kommunikation und Aufgabenverteilung trugen maßgeblich zum Erfolg bei.
Einsatz von Technologien: Der Einsatz von Simulink und SolidWorks erwies sich als vorteilhaft. Während Simulink eine schnelle Wiederholung und Anpassung der Software erlaubte, ermöglichten 3D-gedruckte Bauteile Flexibilität in der Hardwaregestaltung.
Nutzerzentrierung: Die intuitive Bedienung und die visuelle LED-Anzeige unterstreichen die Bedeutung nutzerzentrierter Designs. Dies verdeutlicht, dass die Perspektive der Endanwender im Entwicklungsprozess entscheidend ist.
Projektunterlagen
Das vorliegende Dokument gibt einen strukturierten Überblick über die Planung und Durchführung des Projekts „Das Geheimnis der Feder“. Ziel des Projekts war es, ein innovatives Konzept zu entwickeln, das sowohl technische als auch organisatorische Herausforderungen umfasst. Der Projektverlauf wird im Folgenden anhand des erstellten Projektplans und der tatsächlichen Umsetzung beschrieben und analysiert.
Projektplan
Das Projekt „Das Geheimnis der Feder“ wurde gemäß dem im Gantt-Diagramm festgelegten Zeitplan zwischen dem 30.09.2024 und dem 17.01.2025 durchgeführt. Der Projektzeitraum wurde in mehrere Hauptvorgänge unterteilt, um eine klare Struktur und zeitliche Orientierung zu gewährleisten. Die Hauptvorgänge umfassen:
- Vorbereitung und Planung: Entwicklung der Projektidee, Projektlisteneintrag, Erstellung des Projektplans und Festlegung der erforderlichen Ressourcen.
- Entwicklung und Fertigung: Konstruktion und Umsetzung der Projektergebnisse, unter anderem durch den Einsatz der Fertigungsmethode dem 3D-Druck.
- Dokumentation: Schriftliche Aufbereitung der Projektergebnisse, einschließlich technischer Details, angewandter Methoden und erzielter Resultate im HSHL Wiki.
- Präsentation: Vorbereitung und Durchführung der Präsentation der Projektergebnisse auf der Projektmesse.
- Abgabe und Projektmesse: Abgabe der Projektdokumentation sowie die Präsentation auf der abschließenden Projektmesse.
- Bewertung: Abschluss und Evaluation des Projekts durch Feedback und Ergebnisse aus eigener Bewertung und aus der Bewertung durch den Betreuer.
 |
Projektdurchführung
Die Projektdurchführung orientierte sich eng an dem aufgestellten Projektplan. Dabei wurde auf die Einhaltung der terminlichen Vorgaben geachtet, um einen reibungslosen Ablauf sicherzustellen. Trotz guter Planung ergaben sich jedoch unerwartete Herausforderungen, wie Lieferprobleme bei wichtigen Materialien. Diese Schwierigkeiten führten zu einer spontanen Umstellung auf den Einsatz von 3D-Druck-Modellen, was eine flexible Anpassung der Projektstrategie erforderte. Dennoch konnten die wichtigsten Meilensteine innerhalb des vorgegebenen Zeitrahmens erreicht werden. Die erfolgreiche Durchführung des Projekts unterstreicht die Wichtigkeit einer strukturierten Planung und einer flexiblen Handhabung unvorhergesehener Ereignisse.
Youtube Video
Zur Veranschaulichung des Projekts „Das Geheimnis der Feder“ wurde ein Video „Escape Game - Das Geheimnis der Feder“ erstellt und auf YouTube veröffentlicht. Es zeigt detailliert die einzelnen Schritte der Montage, die Durchführung des Escape Games sowie die Berechnung des optimalen Gewichts gemäß der angegebenen Formel. Abschließend die Lösung präsentiert wird. Das Video dient sowohl als Anleitung für die Nachvollziehbarkeit des Projekts als auch zur Inspiration. Wir freuen uns über Anregungen und Verbesserungsvorschläge. Viel Spaß beim Escape Game!
Weblinks
Literatur
[1] leifiphysik: Kraft und das Gesetz von HOOKE. URL: https://www.leifiphysik.de/mechanik/kraft-und-das-gesetz-von-hooke/grundwissen/gesetz-von-hooke, 19.11.2024
[2] Global Sharp: Datasheet GP2Y0A21YK0F. URL: https://global.sharp/products/device/lineup/data/pdf/datasheet/gp2y0a21yk_e.pdf, 05.01.2025
[3] YouTube: Video "Das Geheimnis der Feder". URL: https://youtu.be/-XGQvfpqG2w, 15.01.2025
→ zurück zur Übersicht: WS 24/25: Escape Game