Laborversuch Gyroskop mit DS1104: Unterschied zwischen den Versionen
| Zeile 423: | Zeile 423: | ||
== Zusammenfassung == | == Zusammenfassung == | ||
Das bearbeitete Projekt, wurde uns auf Nachfrage, von Professor Ulrich Schneider zugewiesen. Die Aufgabe in diesem Projekt war es ein Gestell zu entwerfen, in das ein Gyroskop eingespannt und von einem Motor gedreht werden kann. Dieser Aufbau sollte so wie er ist, in ein Labor in Betrieb genommen werden lassen können. | |||
Es sollte möglich sein die Rotationsgeschwindigkeit des Motors mit einem Drehknopf zu bestimmen. Dies wurde mit Hilfe eines Potentiometers realisiert. | |||
Der Motor bekommt dann von der angeschlossenen Motorsteuerung (L298N) eine Pulsweite übertragen und dreht sich. Von dem Motor lässt sich ein Signal auslesen, was dazu genutzt werden kann um eine Referenzmessung der Rotationsgeschwindigkeit durchzuführen. Diese Referenzmessung dient zur Rückkopplung der Regelung und passt die Drehgeschwindigkeit des Motors an. | |||
Das Gyroskop muss, bevor der Motor in Betrieb genommen wird, einmal ein paar Messwerte so aufnehmen, damit es möglich ist das Offset bei der nächsten Inbetriebnahme zu Eliminieren. Mit den folgenden Messwerten ist es dann möglich die Rotationsgeschwindigkeit und den Gierwinkel ausgeben zulassen. | |||
Alles in allem wurde für dieses Projekt der Projektplan nicht eingehalten, da andere Verpflichtung innerhalb und außerhalb des Studiums dafür gesorgt haben, dass zu wenig Zeit übrig war. | |||
Es wurde jedoch ein Holzgestell gebaut, welches so verwendbar ist, als auch ein Programm erstellt, welches einen Großteil der gestellten Anforderungen erfüllt. | |||
=== Lessons Learned === | === Lessons Learned === | ||
Für ein Projekt mit diesem Umfang, ist es notwendig sich dafür mehr Zeit zu nehmen und andere Module auszulassen oder sich so einem Projekt erst widmen, wenn man ein besseres Verständnis von Simulink, Arduino und Regelungstechnik hat. | Für ein Projekt mit diesem Umfang, ist es notwendig sich dafür mehr Zeit zu nehmen und andere Module auszulassen oder sich so einem Projekt erst widmen, wenn man ein besseres Verständnis von Simulink, Arduino und Regelungstechnik hat. | ||
Version vom 6. Januar 2024, 11:20 Uhr
Autor: Lars Engeln & Sven Brinkmann
Betreuer: Prof. Schneider
Einleitung
In diesen Praktikum wird ein Motor über einen Drehknopf bedient, damit die Drehgeschwindigkeit variabel eingestellt werden kann. Auf dem Motor wird ein Drehteller mit einer Gyroskop Halterung montiert,
sodass das Gyroskop im Stillstand (Ruheposition) kalibriert werden kann. In diesem Versuch wird das Gyroskop (GY-35-RC) verwendet. Die Vorrichtung dient zum Vergleichen der Winkelgeschwindigkeit, zwischen
dem Gyroskop und einer Referenzmessung. Diese Referenzmessung wird zunächst durch eine Einstellung in der Motorsteuerung realisiert, sollte diese Funktionsweise nicht standhalten wird auf eine Geschwindigkeitsmessung
mithilfe einer Drehachse und Lochscheibe z.B Speedsensor LM393 zurückgegriffen. Die berechneten Ergebnisse vom Gyroskop und der Referenzmessung werden auf einem Display angezeigt.
Anforderungen
| ID | Inhalt | Klasse | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|
| 1 | Als Hauptsensor kommt ein analoges Gyroskop (GY-35-RC) zum Einsatz. Darauf verbaut ist ein muRata ENC-03RC Einachsgyro. Dies ist bereits vorhanden. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 2 | Ein Motor dreht das Gyroskop mit konstanter Geschwindigkeit im Bereich von ±300 °/s. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 3 | Die Drehgeschwindigkeit soll über einen Drehknopf eingestellt werden. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 4 | Die wahre Geschwindigkeit (Referenz) wird mit einem Drehencoder auf ±0,1 °/s bestimmt. | NFR | Prof. Schneider | 10.10.2023 | ||
| 5 | Als Messwerterfassungskarte kommt eine dSpace DS1104 R&D Controller Board zum Einsatz. | FR | Prof. Schneider | 10.10.2023 | ||
| 6 | Mit der Messwerterfassungskarte werden die Gierrate des Gyro und des Referenzsystems erfasst. | FR | Prof. Schneider | 10.10.2023 | ||
| 7 | Referenzgeschwindigkeit und Messwert werden auf eine Display angezeigt. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 8 | Der Messaufbau muss für Studentische Praktika robust und langlebig sein. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 9 | Die digitale Signalverarbeitung erfolgt über MATLAB/Simulink. | NFR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 10 | Die Anzeige der Mess- und Referenzdaten erfolgt in dSpace ControlDesk. | NFR | Prof. Schneider | 10.10.2023 | ||
| 11 | Im Stillstand muss der Gyrooffset kalibriert werden. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 12 | Die Messwerte Gierrate und Winkel sind mitsamt Messunsicherheit anzuzeigen. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 13 | Die Spannungsversorgung kann über ein Labornetzteil erfolgen. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
| 14 | Der Aufbau muss möglichst kompakt gestaltet werden, damit er platzsparend gelagert werden kann. | FR | Prof. Schneider | 10.10.2023 | Lars Engeln | 11.10.2023 |
Funktionaler Systementwurf/Technischer Systementwurf
Funktionaler Systementwurf
Im funktionalen Systementwurf wurde das System in mehrere Subkomponenten unterteilt, die jeweils für eine spezifische Teilaufgabe zuständig sind. Durch die Zusammensetzung dieser Komponenten wird die Gesamtaufgabe des Laborversuchs erfüllt. Die Unterteilung in spezifische Subkomponenten ermöglicht es, das Gesamtsystem übersichtlich und verständlich zu gestalten und die Entwicklung des Projekts zu strukturieren.
- Arduino: Der Mikrocontroller wertet die Sensordaten aus und stellt Sie dem Anwender zur Verfügung. Mit dem Ergebnis wird das Display angesteuert.
- Display: Das Display visualisiert dem Anwender die Messergebnisse.
- Referenzmessung: Diese Komponente misst die Winkelgeschwindigkeit des Motors.
- Motortreiber & Drehknopf: Der Motortreiber & Drehknopf steuert die Energiezufuhr des Motors und begrenzt somit dessen Leistung.
- Schleifring: Der Schleifring dient zu Energieversorgung und Übertragung der Sensordaten des Gyroskop.
- Mechanik-Baugruppen: Mit den Mechanik Baugruppen wird das gesamte Laborgestell beschrieben, es dient zum fixieren des Gyroskop sowie zum abdämpfen von Schwingungen.
In Abb.1 wird zunächst der funktionale Systementwurf dargestellt.
Bei dem Signalfluss in (Abb.2) werden zunächst ein Arduino und ein LCD-Display verwendet, da auf diese Weise die aktuellen Werte des Gyroskops und des Referenzwertes angezeigt werden können.
-
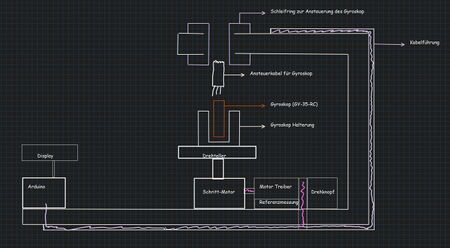 Abb. 1 Funktionaler Systementwurf
Abb. 1 Funktionaler Systementwurf -
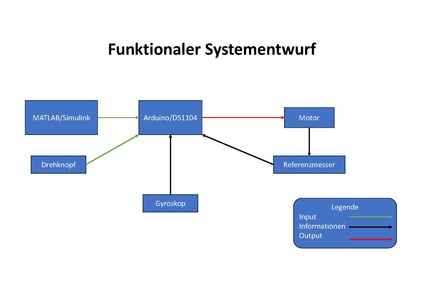 Abb.2 Funktionaler Systementwurf Signalfluss
Abb.2 Funktionaler Systementwurf Signalfluss


Technischer Systementwurf
Für den technischen Systementwurf ist nun Abb. 3 beschreibend. Es wird von dem Nutzer ein Sollwert über einen Drehknopf(Potentiometer) eingestellt. Dieser Sollwert wird dann an den Motortreiber weitergegeben, welcher den Motor antreibt. Der angetriebene Motor beginnt somit sich zu drehen, was dafür sorgt, dass das Gyroskop Werte bezüglich der Geschwindigkeit zurückgibt. Über diese Messung, wird das Signal Rückgekoppelt, um die Differenz des Soll- und Istwerts zu bestimmen und um den Motor zu Regeln.
-
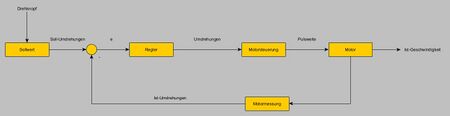 Abb. 3 Technischer Systementwurf Regelkreis
Abb. 3 Technischer Systementwurf Regelkreis -
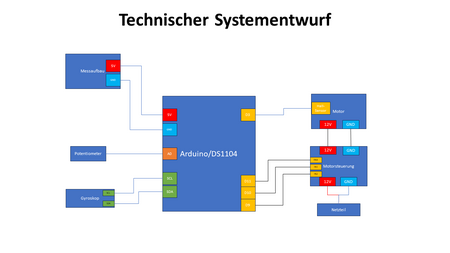 Abb. 4 Technischer Systementwurf Verkablung
Abb. 4 Technischer Systementwurf Verkablung


Projektplan
Nachfolgend wird der erstellte Projektplan anhand eines Gantt-Charts dargestellt.
-
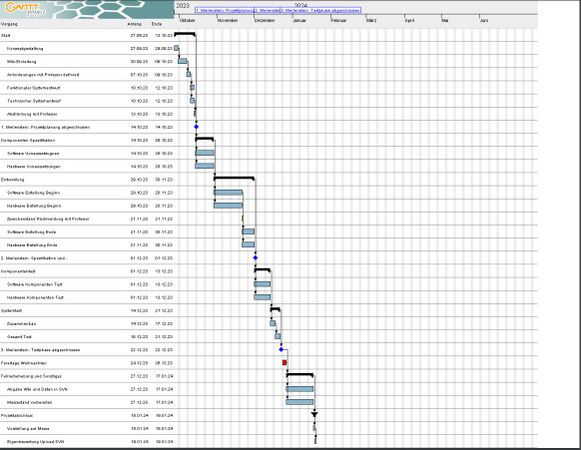 Abb. 4 Projektplan
Abb. 4 Projektplan

Komponentenspezifikation
In diesem Kapitel werden die benötigten Komponenten mit ihren Voraussetzungen beschrieben und Kaufteile definiert.
Eine Liste der Kaufteile befindet sich im oberen Teil des Artikels [BOM].
Microcontroller
Für den Versuch wird ein Microcontroller benötigt, welcher die den Motor antreibt und die ermittelten Messwerte aufnehmen und darstellen kann. In den Anforderungen wurde hierzu die DS1104 definiert, aufgrund der einfacheren Zugänglichkeit beim erstellen, als auch bei der Vorführung auf der Messe wird der Versuchsaufbau mit einem Arduino Uno 3 angefertigt. Die Umstellung auf die DS1104 Karte der Firma DSpace kann anschließend mit einem geringen Aufwand umgesetzt werden.
Motor
Der benötigte Motor zum Projekt wurde über die Anforderungen insoweit definiert, das dieser mit einer Geschwindigkeit im Bereich von ±300 °/s drehen soll. Des Weiteren muss ein Weg gefunden werden, wie die tatsächliche Geschwindigkeit elegant bestimmt werden kann. Die im Internet kaufbaren Motoren werden üblich in der Einheit [RPM] zu deutsch, "Umdrehung pro Minute [U/min] " angegeben. Demnach haben wir die Angabe aus der Anforderungsliste in die Einheit U/min wie folgt umgerechnet:
1. 300 °/s * 60s = 18.000 °/min
2. Nun wird dieser Wert durch 360° geteilt, damit wir auf U/min kommen.
3. Das entspricht 18.000 °/min : 360° = 50 U/min oder [RPM]
Es muss nun ein Motor ausgewählt werden, welcher eine Geschwindigkeit von 50 U/min erreicht und die tatsächliche Geschwindigkeit als Signal ausgeben kann.
Nach einer Recherche konnten Motoren für den Modellbau gefunden werden, mit dem die gegebenen Voraussetzung erfüllt werden. Der Ausgewählte Motor ist ein Getriebemotor, welcher dank seiner Übersetzung auch höhere Drehmomente an der Narbe erzeugen kann. Die Geschwindigkeit des Motors wird durch einen Hall-Sensor ausgegeben. Der Hall-Sensor misst das Geschwindigkeitssignal vom Permanentmagnet-Gleichstrommotor. Wenn sich die Welle dreht, wird eine bestimmte Anzahl von Impulsen erzeugt, die von der Hall-Geräteschaltung ausgegeben werden und zu Zählimpulsen des Rotationszählers werden. Diese Zählimpulse können anschließend in eine U/min umgerechnet werden.
Gyroskop
Ein Gyroskop ist ein Instrument oder Sensor, das dazu dient, die Orientierung oder Rotationsrate eines Objekts im Raum zu messen. Es basiert auf den Prinzipien der Kreiselstabilität und kann in verschiedenen Formen vorkommen, darunter mechanische Gyroskope, elektronische Gyroskope und optische Gyroskope. Gyroskope werden häufig in Flugzeugen oder Schiffen genutzt.
GY-35-RC Ein einachsiges analoges elektronisches Gyroskop, auch als Rate-Gyroskop oder Gyrosensor bezeichnet, verwendet elektronische Sensoren, um die Rotationsrate um eine bestimmte Achse zu messen. Beim drehen des angeschlossenes Sensors wird über die Corioliskraft die Rotationsrate berechnet.
Das Gyroskop braucht eine Stromversorgung zwischen 3-5V. Dieses Gyroskop kann eine maximale Rotationsrate von ±300°/s ausgeben.
MPU-6050
Dieses Gyroskop ist ein digitales Gyroskop. Es kann sowohl die Beschleunigung ausgeben, als auch die Rotationsrate & Temperatur.
Die Spannungsversorgung muss zwischen 3,3V und 5V sein und das Gyroskop kann hat einen variierenden Messbereich. Das heißt, dass es möglich ist den Messbereich festzulegen. Die Messbereiche sind ±250°/s, ±500°/s, ±1000°/s, ±2000°/s.
Potentiometer
Durch das bedienen eines Drehknopfs soll die IST - Geschwindigkeit des Motors eingestellt werden können. Hierzu wird ein lineares Potentiometer. Potentiometer können über lineare oder logarithmische Kegel verfügen. Bei einem linearen Kegel ändert sich die Spannung stets in gleich bleibenden Schritten in Abhängigkeit von der Drehung der Steuereinheit.
Mechanische Baugruppe
Laut der Anforderungsliste muss der Aufbau den Anforderungen studentischer Arbeiten standhalten, des Weiteren soll er möglichst platzsparend aufgebaut sein. Aufgrund der einfachen Zerspanbarkeit, wird Holz als Grundwerkstoff für die mechanischen Komponenten verwendet. Die Komponenten werden dabei mithilfe von Einschlagmuttern und Kreuzschlitzschrauben verbunden. Damit wird eine Abnutzung der Bauteile, durch Montage und Demontage, vorgebeugt. Der fertige Aufbau darf maximal Abmaße von 300x300x300 mm aufweisen, um als platzsparend akzeptiert zu werden.
Schleifring
Die Verkabelung der Meisten Komponenten ist Starr, damit ist gemeint, dass die Kabel keiner Rotation oder Bewegung ausgesetzt sind. Bei der Versorgung des Gyroskop ist eine dynamische Verkabelung bzw. Übertragung notwendig, da hier die Kabel einer Rotation ausgesetzt sind. Ein Schleifring ermöglicht die notwendige Stromversorgung des Gyroskops, des Weiteren können die aufgenommenen Daten an den Microcontroller wiedergegeben werden. Der Schleifring muss genügend Anschlussmöglichkeiten bieten und sollte in seiner Bauweise wenig Platz benötigen.
Umsetzung (HW/SW)
Programm-Ablauf-Plan

In Abbildung 5 ist der Programm-Ablauf-Plan dargestellt. Dieser gibt wieder wie das Programm und damit die Regelung mit unserer Hardware funktionieren soll.
In diesem Programm-Ablauf-Plan läuft das Gyroskop nicht mit in die tatsächliche Regelung ein, sondern es wird nur am Anfang kalibriert um das Offset zu Eliminieren. Dafür muss zunächst Messwerte über das Gyroskop im Stillstand aufgenommen werden und in dem Workspace(MATLAB) der Mittelwert der Messwerte gebildet werden, welcher zukünftig von den fortlaufenden Messwerten abgezogen wird.
Nach diesem Teil des Programms kommt der tatsächliche Regelkreis ins Spiel. Nachdem das Programm Neugestartet wurde, kann nun die Solldrehgeschwindigkeit des Motors über einen Drehknopf(Potentiometer) eingestellt werden. Anschließend muss von dem Benutzer noch die Drehrichtung eingestellt werden, damit der Motor sich tatsächlich dreht. Die eingegebene Solldrehgeschwindigkeit muss dann in eine Pulsweite umgewandelt werden, damit der Motor über eine Motorsteuerung tatsächlich angesteuert werden kann. Dazu muss wird dann noch überprüft, ob die Pulsweite >50 ist, da bei allen Pulsweiten unter 50 der Motor sich nicht dreht oder sehr langsam und sich das Gerät nicht "gesund" anhört. Demnach wurde zum Schutz der Komponente dieser Grenzwert gesetzt. Wenn nun die Pulsweite über 50 liegen sollte, dann dreht sich der Motor in die eingestellte Richtung. Nebenbei wird ein Signal von dem Motor abgegriffen, welches dazu dient die Drehgeschwindigkeit zu messen. Wenn der gemessene Wert und der eingestellte Wert übereinstimmen dreht sich der Motor ganz normal weiter. Wenn jedoch die Messwerte von den Sollwert abweichen, wird der Messwert zurückgeführt und von dem Sollwert abgezogen, wodurch, sich die Drehgeschwindigkeit des Motors ändert.
Das Programm läuft dann so lange, bis der Benutzer das Programm beendet.
Software
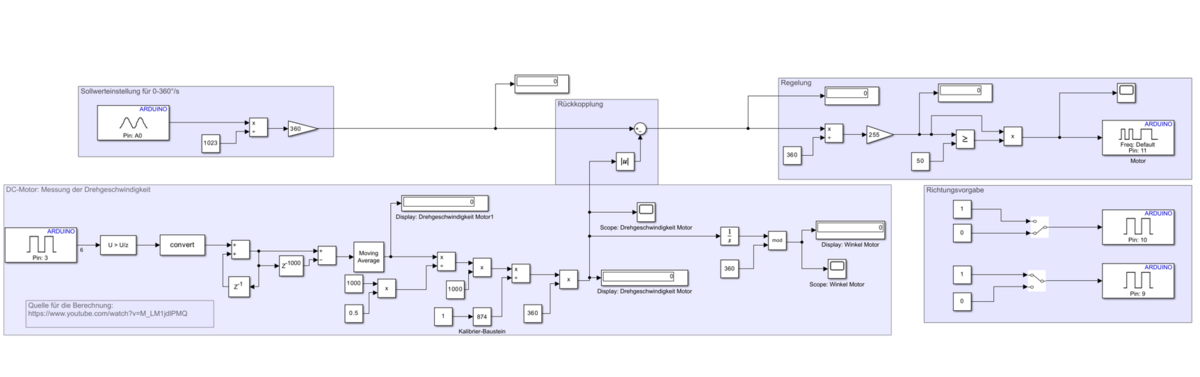
Sollwert einstellen

Der Sollwert wird mittels eines Drehknopf(Potentiometer) eingestellt. Es ist eine Anforderung an das Projekt, dass der Sollwert über einen Drehknopf eingestellt werden muss. Die maximale Umdrehung die der angeschlossene Motor ausgeben kann ist 60 Umdrehungen/min.
Der Wert der bei den Potentiometern ausgelesen werden kann beträgt maximal 210-1 und somit 1023. Die eingehenden Signale werden dann immer durch 1023 geteilt um maximal eine 1 auszugeben. Dieser Wert wird mit den oben genannten Umdrehungen multipliziert um die Entsprechenden Umdrehungen die Minute zu bekommen.
Anschließend werden die Ergebnisse der Umrechnung durch 60 Umdrehungen dividiert und mit 360° multipliziert. Die Drehgeschwindigkeit ist damit in °/min eingestellt.
Messung der Drehgeschwindigkeit an dem Motor

Mit dem Programmteil in der Abbildung 8, wird die eingestellte Geschwindigkeit von dem Motor berechnet. Anschließend wird die Geschwindigkeit angezeigt als auch Integriert um den derzeitigen Winkel des Motors zu bestimmen. Damit kein Winkel über 360° oder unter -360°, wird der "mod"-Block verwendet.
Ansteuerung des Motors

In der Regelung (Abbildung 9) wird die vorher berechnete Drehgeschwindigkeit in eine Pulsweite umgewandelt. Dafür wird zunächst die angegebene Drehgeschwindigkeit in °/min durch 360° geteilt und mit 255 multipliziert. Der Wert muss 255 sein, da die Pulsweite eine Spanne von 0-255 hat, mit der dann das Signal an die Motorsteuerung gegeben wird.
Dazu wird erst ein Signal an die Motorsteuerung gegeben, wenn die Pulsweite größer als 50 ist. Die Spannung die benötigt wird um den Motor zu bewegen ist unter 50 zu niedrig, was von dem Motorsteuergerät abhängig ist.
Bestimmen der Drehrichtung

Der Motor soll laut den Anforderungen in beide Richtungen drehbar sein. Damit dies realisiert werden kann, muss an die Pins 9 oder 10 ein Signal eingehen.
Damit der Motor sich in eine Richtung dreht, muss einer der Pins eine 1 übergeben bekommen und der andere eine 0. Der Motor dreht sich nicht, wenn beide Pins eine 0 oder eine 1 übertragen bekommen.
Eliminierung des Offsets beim Gyroskops und messen der Rotationsgeschwindigkeit

Zuerst muss die richtige Achse des digitalen Gyroskops ausgewählt werden, die davon abhängt, wie das Gyroskop in der Halterung befestigt wurde. Danach darf das Gyroskop nicht bewegt werden und das Simulationsprogramm muss gestartet werden. Dort können ca. 10s lang Messwerte aufgenommen und an den aktuellen Arbeitsbereich gesendet werden. In der Variablen "T" ist dann der Mittelwert der aufgenommenen Messwerte festzuhalten. Bei der nächsten Inbetriebnahme wird dieser Mittelwert von den eingehenden Messwerten subtrahiert. Damit ist der Offset des Gyroskops weitgehend korrigiert. Die Toleranz des Rohmesssignals beträgt nun ±0,05°. Damit nicht nur die Drehzahl ausgegeben wird, werden die Messsignale noch integriert, was dazu führt, dass nun der Drehwinkel berechnet wird. Hierbei ist zu beachten, dass sich ab einer Messdauer von 60s ein Fehler einschleicht. Je länger die Messzeit ist, desto größer wird die Messunsicherheit des angezeigten Winkels. Wenn nun eine volle Umdrehung vom Gyroskop erfasst wird, soll der Winkel wieder 0 anzeigen. Dazu wird der Block "mod" verwendet, der ein Modulo darstellt.
Hardware
In diesem Abschnitt werden die erstellten Hardware Komponenten vorgestellt.
Komponententest
Die zu testenden Komponenten sind
- die Potentiometer
- der Motor
- das Gyroskop
Potentiometer

-
 Abbildung 12: Potentiometer Funktionalität
Abbildung 12: Potentiometer Funktionalität -
 Abbildung Jucktnicht Angeschlossenes Potentiometer
Abbildung Jucktnicht Angeschlossenes Potentiometer


Motor

-
 Abbildung schießmichtot Pinbelegung Motorsteuerung
Abbildung schießmichtot Pinbelegung Motorsteuerung -
 Abbildung interessiertmichnicht Verkablung Test:Arduino-Motorsteuerung
Abbildung interessiertmichnicht Verkablung Test:Arduino-Motorsteuerung


Gyroskop GY-35-RC
Der Test des analogen Gyroskops (GY-35-RC) hat beim Testen keine brauchbaren Messwerte ausgegeben. Trotz richtigen Anschließens des Gyroskops, wurden keine Werte angezeigt, sobald das Gyroskop gedreht wurde.

Gyroskop MPU-6050
Nach mehrmaligen Versuch mit dem Gyroskop GY-35-RC, sind keine vernünftigen Messwerte erfasst worden. So wurde die Entscheidung getroffen, dass nun ein digitales Gyroskop verwendet wird. Das ausgewählte Gyroskop hat die Modellnummer MPU-6050.

Ergebnis

Zusammenfassung
Das bearbeitete Projekt, wurde uns auf Nachfrage, von Professor Ulrich Schneider zugewiesen. Die Aufgabe in diesem Projekt war es ein Gestell zu entwerfen, in das ein Gyroskop eingespannt und von einem Motor gedreht werden kann. Dieser Aufbau sollte so wie er ist, in ein Labor in Betrieb genommen werden lassen können. Es sollte möglich sein die Rotationsgeschwindigkeit des Motors mit einem Drehknopf zu bestimmen. Dies wurde mit Hilfe eines Potentiometers realisiert. Der Motor bekommt dann von der angeschlossenen Motorsteuerung (L298N) eine Pulsweite übertragen und dreht sich. Von dem Motor lässt sich ein Signal auslesen, was dazu genutzt werden kann um eine Referenzmessung der Rotationsgeschwindigkeit durchzuführen. Diese Referenzmessung dient zur Rückkopplung der Regelung und passt die Drehgeschwindigkeit des Motors an. Das Gyroskop muss, bevor der Motor in Betrieb genommen wird, einmal ein paar Messwerte so aufnehmen, damit es möglich ist das Offset bei der nächsten Inbetriebnahme zu Eliminieren. Mit den folgenden Messwerten ist es dann möglich die Rotationsgeschwindigkeit und den Gierwinkel ausgeben zulassen. Alles in allem wurde für dieses Projekt der Projektplan nicht eingehalten, da andere Verpflichtung innerhalb und außerhalb des Studiums dafür gesorgt haben, dass zu wenig Zeit übrig war. Es wurde jedoch ein Holzgestell gebaut, welches so verwendbar ist, als auch ein Programm erstellt, welches einen Großteil der gestellten Anforderungen erfüllt.
Lessons Learned
Für ein Projekt mit diesem Umfang, ist es notwendig sich dafür mehr Zeit zu nehmen und andere Module auszulassen oder sich so einem Projekt erst widmen, wenn man ein besseres Verständnis von Simulink, Arduino und Regelungstechnik hat. Es wurde nach kürzerer Zeit bereits offensichtlich für uns, dass wir für das Projekt nicht alle Anforderungen erfüllen können, da es uns an Fachwissen fehlt und die Umsetzung zu viel Zeit beanspruchen würde. "Mal eben an das Projekt setzen" stellte sich als schwieriger heraus als ursprünglich erwartet, da wir nicht einfach so von dem letzten Punkt weiterarbeiten konnten ohne dass es notwendig war, sich wieder richtig reinzuarbeiten.
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 23/24: Angewandte Elektrotechnik (BSE)