Selbstregelndes Schwungrad: Unterschied zwischen den Versionen
→Projektplanung: 3D Druck Teile ergänzt |
|||
| Zeile 109: | Zeile 109: | ||
|} | |} | ||
Zusätzliche Komponenten, wie ein Holzbrett, Verbindungskabel sowie verschiedene Schrauben und Muttern, waren bereits vorhanden. Daher ist eine detaillierte Auflistung dieser Teile nicht möglich. | Zusätzliche Komponenten, wie ein Holzbrett, Verbindungskabel sowie verschiedene Schrauben und Muttern, waren bereits vorhanden. Daher ist eine detaillierte Auflistung dieser Teile nicht möglich. Die Halterung und das Schwungrad wurden mithilfe eines 3D Druckers aus PLA Gedruckt und sind somit ebenfall nicht genau zu beziffern. | ||
== Umsetzung (HW/SW) == | == Umsetzung (HW/SW) == | ||
Version vom 23. November 2023, 17:57 Uhr
Autor: Bastian Hannappel, Paul Janzen
Betreuer: Prof. Göbel
Kategorie: Projekte ET MTR BSE WS2023
Einleitung
Das Projekt "Selbstregelndes Schwungrad" im Rahmen des Moduls Mechatronische Systeme 2 im 5. Semester des Studiengangs Mechatronik handelt von einem Schwungrad, welches durch einen Motor an einer Halterung angebracht ist. Die Halterung ist an einer Stelle mit dem Boden verbunden, kann aber entlang einer Ebene um diesen Punkt rotieren. Durch ein Gyroskop erkennt ein Arduino ob die Halterung senkrecht stehen. Sollte etwas die Halterung in eine Richtung kippen lassen, kann das Schwungrad durch gezielte Drehungen dem entgegenwirken und sich wieder senkrecht aufstellen.
Anforderungen
| Nr. | Beschreibung | Bereich | Zuständig |
|---|---|---|---|
| 1 | Das selbstregelnde Schwungrad muss aus einem Schwungrad, montiert an einer Halterung bestehen. | Hardware | noch offen |
| 2 | Das Schwungrad muss von einem DC-Motor betrieben werden. | Hardware | noch offen |
| 3 | Das Gyroskop muss die Stellung der Halterung feststellen können. | Hardware/Software | noch offen |
| 4 | Eingabe, Verarbeitung und Ausgabe muss mit einem Arduino und Matlab Simulink realisiert werden. | Software | noch offen |
| 5 | Mithilfe eines PID Reglers muss sich das Selbstregelnde Schwungrad senkrecht ausrichten. | Software | noch offen |
| 6 | Optional: Das Schwungrad muss sich selber aus der Ruhestellung aufrichten können. | Software | noch offen |
Funktionaler Systementwurf/Technischer Systementwurf
Im folgenden Systementwurf wird das Projekt in Systemkomponenten unterteilt:
- Arduino: Programmiert mit Matlab Simulink.
- Motor/Schwungrad: Steuerung des Motors bzw des Schwungrads
- Gyroskop: Positionsabfrage mittels eines Gyroskops
- Regler: Regler zur Senkrechtstellung
-
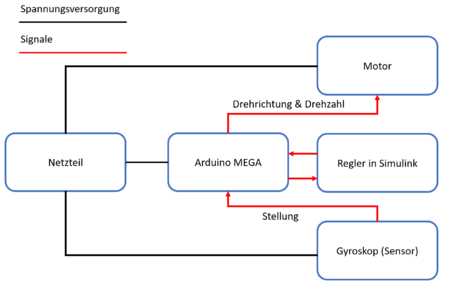 Technischer Systementwurf
Technischer Systementwurf -
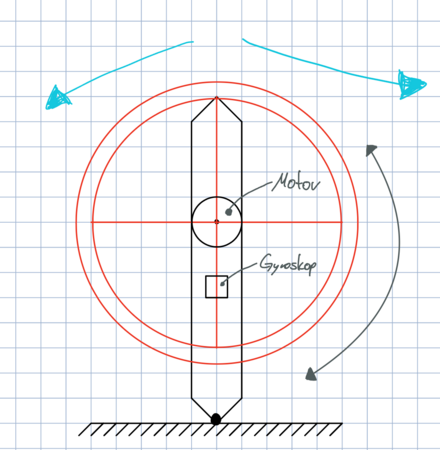 Funktionaler Systementwurf - Skizze
Funktionaler Systementwurf - Skizze


Projektplanung
| Nr. | Bauteil | Kosten | Link |
|---|---|---|---|
| 1 | Arduino MEGA 2560 | 38,50€ | Reichelt.de |
| 2 | L298N Motortreiber mit doppelter H-Brücke | 2,65€ | Roboter-Bausatz.de |
| 3 | 3-Achsen Beschleunigungs-/ Lagesensor - GY-521 MPU-6050 | 2,95€ | Roboter-Bausatz.de |
| 4 | DC Motor 12V 9800 RPM 0.16A | 1,45€ | Roboter-Bausatz.de |
| 5 | Breadboard | 0,95€ | Roboter-Bausatz.de |
| 6 | Flanschkupplung 3mm | 2,76€ | GTech-Shop.de |
Zusätzliche Komponenten, wie ein Holzbrett, Verbindungskabel sowie verschiedene Schrauben und Muttern, waren bereits vorhanden. Daher ist eine detaillierte Auflistung dieser Teile nicht möglich. Die Halterung und das Schwungrad wurden mithilfe eines 3D Druckers aus PLA Gedruckt und sind somit ebenfall nicht genau zu beziffern.
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)