Gewichtsgeregelte Flüssigkeitsdosierung: Unterschied zwischen den Versionen
Die Seite wurde neu angelegt: „Kategorie:Projekte Kategorie:ProjekteET MTR BSE WS2023 <!-- Kopieren Sie diesen Header in Ihren Artikel, damit er aufgelistet wird. --> '''Autor:''' Asmaa Kachout Aarourou & Daniel Gosedopp & Florian Pichmann <br/> '''Betreuer: ''' Marc Ebmeyer<br/> == Einleitung == Im Studiengang Business and Systems Engineering wird im…“ |
Keine Bearbeitungszusammenfassung |
||
| Zeile 114: | Zeile 114: | ||
== Projektunterlagen == | == Projektunterlagen == | ||
=== Projektplan === | === Projektplan === | ||
[[Datei: BSE_GC.png|800px|Projektplan]] | |||
=== Projektdurchführung === | === Projektdurchführung === | ||
Version vom 23. November 2023, 07:54 Uhr
Autor: Asmaa Kachout Aarourou & Daniel Gosedopp & Florian Pichmann
Betreuer: Marc Ebmeyer
Einleitung
Im Studiengang Business and Systems Engineering wird im Rahmen des Fachpraktikums "Angewandte Elektrotechnik" ein Gruppenprojekt entwickelt.
Dieses Projekt befasst sich mit einer gewichtsgeregelten Flüssigkeitsdosierung, die für Anwendungen mit grammgenauen Gewichtsanforderungen verwendet werden kann. Als Beispiel kann hier die Chemieindustrie bei der Abfüllung von Reinigungs-/Pflegeprodukten oder das Mixen von Nährstofflösungen für Pflanzen genannt werden. Auch der Einsatz in Schulen zur Durchführung von Experimenten mit Flüssigkeiten ist möglich.
Der Automat soll eine gewünschte Flüssigkeitsmenge mittels einer Pumpe und Schlauchverbindungen aus einem Tank in ein bereitstehendes Gefäß einfüllen. Die Sollmengenvorgabe wird mit einem Touchscreen realisiert. Hier kann entweder direkt das Gewicht oder die bekannte Dichte der Flüssigkeit zusammen mit dem gewünschten Volumen in z.B. Milliliter vorgegeben werden. Der Regelkreis wird mithilfe einer Wägezelle als Sensor, auf der das Zielbehältnis platziert wird, und einer Peristaltikpumpe (Schlauchpumpe) als Aktuator realisiert. Die Software (Signalverarbeitung, Regler) läuft auf einem Mikrocontroller. Die Vorgehensweise bei der Bearbeitung des Projekts orientiert sich am V-Modell, weshalb auch dieser Wiki-Artikel in die Phasen des V-Modells bis zum Komponententest gegliedert ist.
Insgesamt besteht das Projekt aus den drei Hauptteilen Hardwareaufbau, Software für Signalverarbeitung und Regler sowie Software für das Touchdisplay. Die Arbeitsaufteilung innerhalb der Gruppe erfolgt an diesen Teilen.
Anforderungen
| ID | Typ (I = Info, A = Anforderung) | Kapitel | Inhalt | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|---|
| 001 | I | 1 | Hardware | ||||
| 002 | A | Es muss eine Wägezelle verbaut werden, welche in der Lage ist, die Flüssigkeitsmenge mit einer Genauigkeit von +/- 1g zu messen. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 003 | A | Es wird eine regelbare Peristaltikpumpe (Schlauchpumpe) verbaut. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 004 | A | Zur Sollwertvorgabe wird ein Touchdisplay verwendet (HMI). Hier kann entweder ein gewünschtes Gewicht oder die Dichte der Flüssigkeit zusammen mit dem gewünschten Volumen angegeben werden. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 005 | A | Für die Daten- und Signalverarbeitung, die Regelung und die Anbindung des Touchdisplays wird ein Arduino Mikrocontroller genutzt. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 006 | A | Es müssen zwei Behälter (z.B. Becherglas) vorhanden sein. Einer dient als Vorrat, der Andere als Zielgefäß. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 007 | A | Der Transport der Flüssigkeit zwischen den Behältern erfolgt durch Kunststoffschlauchverbindungen. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 008 | A | Die Energieversorgung wird von einem externen Netzteil übernommen. Dieses muss genug Leistung haben, um die gesamte Elektronik zu betreiben. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 009 | I | 2 | Software | ||||
| 010 | A | Für die Erstellung der Software wird Matlab/Simulink verwendet. Ggf. wird aus dem Modell C-Code generiert, welcher auf den Arduino geflasht wird. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 011 | A | Die Software muss die Eingabe auf dem Touchdisplay zu einem Sollwert für die Regelung verarbeiten. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 012 | A | Es muss ein Kalibriermodus für die Wägezelle vorhanden sein. Die Kalibrierung wird ebenfalls mit Hilfe des Touchscreens vorgenommen. Hierzu ist ein Kalibriergewicht notwendig. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 013 | A | Das gemessene Ist-Gewicht wird mit dem Sollwert zu einer Regeldifferenz verrechnet, sodass der Regler eine Stellgröße zur Ansteuerung der Pumpe berechnen kann. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 014 | A | Es wird ein stetiger Regler verwendet. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 015 | I | 3 | Dokumentation | ||||
| 016 | A | Alle Projektdateien werden in SVN hinterlegt. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 | |
| 017 | A | Das gesamte Projekt wird im Wiki dokumentiert. | Pichmann | 05.10.2023 | Kachout, Gosedopp | 06.10.2023 |
| Anzahl | Komponente | Preis |
|---|---|---|
| 1 | Kamoer KCM Peristaltikpumpe | 50,38€ |
| 1 | Arduino Mega 2560 | 15,95€ |
| 1 | Wägezelle RBS15855 | 1,95€ |
| 1 | HX711 24 Bit ADU | 0,89€ |
| 1 | Touchdisplay | € |
| 2m | Silikonschlauch 3,2mm * 6,4mm | 9,49€ |
Funktionaler Systementwurf/Technischer Systementwurf
-
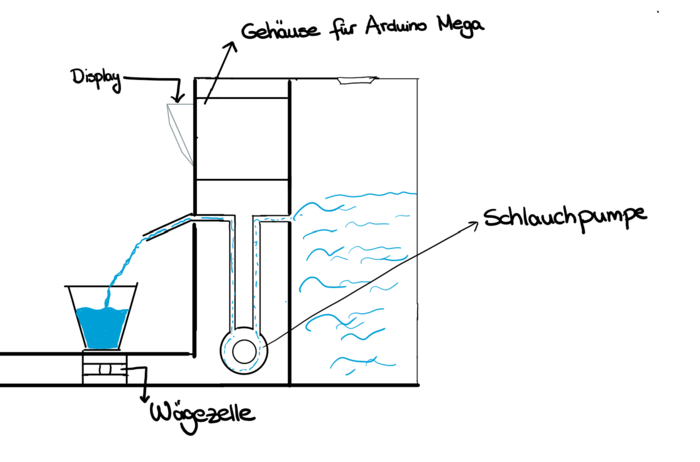
Abbildung 1: Skizze funktionaler Systementwurf

-
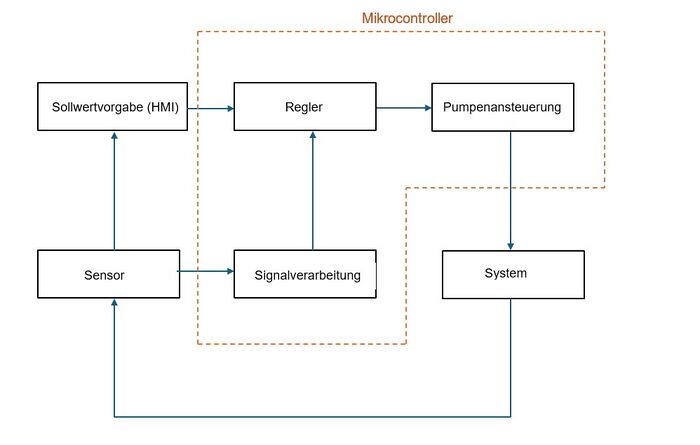
Abbildung 2: Skizze technischer Systementwurf

Komponentenspezifikation
Umsetzung (HW/SW)
Komponententest
Ergebnis
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan

Projektdurchführung
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 22/23: Angewandte Elektrotechnik (BSE)