Stopplinien-Verhalten: Unterschied zwischen den Versionen
| (24 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 4: | Zeile 4: | ||
== Einleitung == | == Einleitung == | ||
Ziel ist es, das Verhalten des Fahrzeugs an Stopplinien entsprechend den Anforderungen im Lastenheft zu implementieren. Das Fahrzeug muss nach dem Lastenheft im Falle der Erkennung einer Haltelinie immer langsamer fahren. Befindet sich es an der Stopplinie, so muss es dort stoppen und zwei Sekunden halten. | Ziel ist es, das Verhalten des Fahrzeugs an Stopplinien entsprechend den Anforderungen im Lastenheft zu implementieren. Das Fahrzeug muss nach dem Lastenheft im Falle der Erkennung einer Haltelinie immer langsamer fahren. Befindet sich es an der Stopplinie, so muss es dort stoppen und zwei Sekunden halten. Liegt eine Vorfahrtssituation vor, muss dem Hindernis Vorfahrt gewährt und erst dann weitergefahren werden. | ||
== Anforderungen == | == Anforderungen == | ||
Im Lastenheft des Projekts Carolo Cup wird die Anforderung an das Verhalten des Fahrzeugs an einer Stopplinie in REQ10.2340 festgehalten (s. Abbildung 1).<br> | Im Lastenheft des Projekts Carolo Cup wird die Anforderung an das Verhalten des Fahrzeugs an einer Stopplinie in REQ10.2340 festgehalten (s. Abbildung 1).<br> | ||
<gallery mode = "traditional" widths=500px heights=150px> | <gallery mode = "traditional" widths=500px heights=150px> | ||
File:Anforderungen.JPG|<b> | File:Anforderungen.JPG|<b>Abbildung 1: Lastenheftauszug Stopplinien-Verhalten.</b> | ||
</gallery> | </gallery> | ||
Die Umsetzung der Anforderung ist im Pflichtenheft wie folgt festgehalten:<br> | Die Umsetzung der Anforderung ist im Pflichtenheft wie folgt festgehalten:<br> | ||
<gallery mode = "traditional" widths=1250px heights=230px> | <gallery mode = "traditional" widths=1250px heights=230px> | ||
File:Pflichtenheft Heuer Kruse MS2.png|<b> | File:Pflichtenheft Heuer Kruse MS2.png|<b>Abbildung 2: Pflichtenheftauszug zu REQ10.2340.</b> | ||
</gallery> | </gallery> | ||
| Zeile 46: | Zeile 46: | ||
|- | |- | ||
| Eingang | | Eingang | ||
| | | SenKam_Stopplinienabstand_f64 | ||
| Abstand von Fahrzeugfront zur Stopplinie | | Abstand von Fahrzeugfront zur Stopplinie | ||
| m | | m | ||
|- | |- | ||
| Eingang | | Eingang | ||
| | | SenKam_Stopplinienflag_bit | ||
| Gesetzt, wenn eine Stopplinie erkannt wird | | Gesetzt, wenn eine Stopplinie erkannt wird | ||
| - | | - | ||
|- | |- | ||
| Eingang | | Eingang | ||
| | | Vorfahrtssituation_bit | ||
| | | Gesetzt, wenn ein Hindernis an der Kreuzung steht. | ||
| | | - | ||
|- | |||
| Eingang | |||
| T | |||
| Zykluszeit der Simulation | |||
| s | |||
|- | |- | ||
| Ausgang | | Ausgang | ||
| BsfVx_Faktor_f64 | | BsfVx_Faktor_f64 | ||
| Geschwindigkeitsbegrenzungsfaktor, falls Stopplinie erkannt wurde | | Geschwindigkeitsbegrenzungsfaktor, falls Stopplinie erkannt wurde | ||
| - | | - | ||
|} | |} | ||
=== Programmablauf === | === Programmablauf === | ||
Das Programm wird als Zustandsautomat realisiert | Das Programm wird als Zustandsautomat realisiert, dessen Zustandsdiagramm Abbildung 3 zeigt. | ||
<gallery mode = "traditional" widths= | <gallery mode = "traditional" widths=800px heights=380px> | ||
Datei:Stoppverhalen Automat.png|<b>Abb. 3: Progammablaufplan des Stopplinien-Verhaltens.</b> | |||
</gallery> | </gallery> | ||
| Zeile 103: | Zeile 81: | ||
'''Zustand 1 - Auf Stopplinie warten'''<br> | '''Zustand 1 - Auf Stopplinie warten'''<br> | ||
Im ersten Zustand werden zunächst Variablen an den Ausgang übergeben. Anschließend wird abgefragt, ob das Stopplinienflag 1 ist. Trifft dies zu wird der Zustand auf 2 gesetzt | Im ersten Zustand werden zunächst Variablen an den Ausgang übergeben. Anschließend wird abgefragt, ob das Stopplinienflag 1 ist. Trifft dies zu wird der Zustand auf 2 gesetzt. Wurde keine Stopplinie gefunden, so wird der Zustand nicht gewechselt. | ||
'''Zustand 2 - Abbremsen nach Stopplinienerkennung'''<br> | '''Zustand 2 - Abbremsen nach Stopplinienerkennung'''<br> | ||
In diesem Zustand wird abgebremst. Ist der Stopplinienabstand kleiner als 15cm, werden die Motoren abgeschaltet und der Zustand auf 3 gesetzt. | |||
'''Zustand 3 - | '''Zustand 3 - An Stopplinie warten'''<br> | ||
In Zustand | In diesem Zustand wird an der Stopplinie gewartet. Liegt keine Vorfahrtssituation vor, beträgt die Wartezeit 2 Sekunden, ansonsten wird solange gewartet, bis das Hindernis die Kreuzung passiert hat. | ||
'''Zustand 4 - Kreuzung überfahren''' | '''Zustand 4 - Kreuzung überfahren''' | ||
Hier wird solange gefahren, bis die Stopplinie überquert wurde, der Stopplinienabstand also <= 0 ist. Dies ist nötig, damit die Stopplinie nicht als neue Stopplinie erkannt wird und das Farzeug erneut anhält. Danach wechselt der Automat wieder in den ersten Zustand. | |||
== Umsetzung und Ergebnis der Simulation == | |||
Die Implementierung des Algorithmus erfolgt in Simulink als Stateflow Chart. Diese wurde nach dem Zustandsdiagramm aus Abbildung 3 aufgebaut. Der Zustandsautomat besitzt als Eingang den Stopplinienabstand. Die Kamera kann die Stopplinie aber nur bis ca. 52cm vor dem Auto sehen, sodass dieser bei Zufahrt auf die Kreuzung interpoliert werden muss. Dies geschieht im Subsystem "Berechnung_Stopplinienabstand". Um zu prüfen, ob eine Vorfahrtssituation vorliegt, muss auf die LiDAR-Objektliste zugegriffen werden. Das passiert im Subsystem "Überprüfung_Vorfahrtssituation". Im Lastenheft findet sich eine Abbildung, die zeigt, welche Bedingung zur Einleitung einer Vorfahrtssituation erfüllt sein muss. Wenn die Bedingung erfüllt ist, wird das "Vorfahrtssituation_bit" gesetzt. | |||
<gallery mode = "traditional" widths= | <gallery mode = "traditional" widths=1100px heights=400px> | ||
File: | File:Stoppverhalten_Stateflow.png|<b>Abbildung 5: Implementierung der Anhalte- und Vorfahrtlogik.</b> | ||
</gallery> | </gallery> | ||
Das Ergebnis des Stopplinienverhalten wird in der nachfolgenden Abbildung dargestellt | Das Ergebnis des Stopplinienverhalten wird in der nachfolgenden Abbildung dargestellt. | ||
<gallery mode = "traditional" widths=800px heights=520px> | <gallery mode = "traditional" widths=800px heights=520px> | ||
File:Ergebnis StopplinienverhaltenV2.png| | File:Ergebnis StopplinienverhaltenV2.png|<b>Abbildung 6: Wichtige Variablenwerte beim Test der Funktion.</b> | ||
</gallery> | </gallery> | ||
Im ersten Diagramm ist das Stopplinienflag zu sehen, welches bei Detektion einer Stopplinie auf Eins wechselt. | |||
Im zweiten Diagramm ist der dazugehörige Stopplinienabstand zu sehen. Dieser ist solange Null, bis eine Stopplinie erkannt wurde. Die Stopplinie kann ab einem Abstand von einem Meter oder weniger erfasst werden. Am Verlauf ist zudem gut zu erkennen, dass das Fahrzeug beginnt zu verzögern, da der Abstand nicht linear abnimmt. Nach der zweisekündigen Wartezeit beschleunigt das Fahrzeug wieder und der Abstand zur Stopplinie nimmt linear weiter ab. Erreicht dieser Null, so wird die Stopplinie überfahren. | |||
Im letzten Diagramm wird die errechnete Sollgeschwindigkeit ausgegeben. Auch an dieser Kurve ist gut zu sehen, dass das Fahrzeug verzögert. Wenn der Abstand 15 cm oder weniger beträgt, werden die Motoren abgeschaltet, da der Faktor auf Null abfällt. | |||
<onlyinclude><div style="clear:{{{{{|safesubst:}}}#switch:{{{1}}} | <onlyinclude><div style="clear:{{{{{|safesubst:}}}#switch:{{{1}}} | ||
| Zeile 152: | Zeile 117: | ||
}};"></div></onlyinclude> | }};"></div></onlyinclude> | ||
== Unit-Test & Integrations-Test== | == Unit-Test & Integrations-Test == | ||
Im Folgenden sind die einzelnen Testfälle für den Unit- und Integrations-Test im Offline- und Online-Modell zu sehen. | |||
Im Folgenden sind die einzelnen Testfälle für den Unit- und Integrations-Test zu sehen. Durch die Eingabe von Parametern konnten folgende Testfälle geprüft werden | |||
'''Offline-Modell: ''' | |||
Durch die Eingabe von Parametern konnten folgende Testfälle in der Simulation geprüft werden. | |||
{| class=" | {| class="wikitable" style="margin:auto" style="text-align: center; | ||
|+ Tabelle 3: Tests für das Stopplinienverhalten in der Simulation. | |||
! style="font-weight: bold;" | ID | ! style="font-weight: bold;" | ID | ||
! style="font-weight: bold;" | Testfallbeschreibung | ! style="font-weight: bold;" | Testfallbeschreibung | ||
! style="font-weight: bold;" | Eingänge | ! style="font-weight: bold;" | Eingänge | ||
! style="font-weight: bold;" | Ausgang | ! style="font-weight: bold;" | Ausgang | ||
! style="font-weight: bold;" | Erwartetes Ergebnis | ! style="font-weight: bold;" | Erwartetes Ergebnis | ||
! style="font-weight: bold;" | Testergebnis | ! style="font-weight: bold;" | Testergebnis | ||
| Zeile 169: | Zeile 136: | ||
| 1 | | 1 | ||
| Das Fahrzeug fährt mit der vorgegebenen Geschwindigkeit, wenn keine Stopplinie erkannt wurde. | | Das Fahrzeug fährt mit der vorgegebenen Geschwindigkeit, wenn keine Stopplinie erkannt wurde. | ||
| | | <code>SenKam_Stopplinienflag_bit = 0</code>, <code>SenKam_Stopplinienabstand_f64 = 0</code> | ||
| 1 | | 1 | ||
| Vollgas | | Vollgas | ||
| 1 | | 1 | ||
| | | Gosedopp, Wei | ||
| | | 04.01.2023 | ||
|- | |- | ||
| 2 | | 2 | ||
| Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung so muss es | | Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung so muss es 0.15m vor der Stopplinie anhalten | ||
| | | <code>SenKam_Stopplinienflag_bit = 1</code>, <code>SenKam_Stopplinienabstand_f64 <= 0.15</code> | ||
| 0 | | 0 | ||
| Fahrzeug Stoppt | | Fahrzeug Stoppt | ||
| 0 | | 0 | ||
| | | Gosedopp, Wei | ||
| | | 04.01.2023 | ||
|- | |- | ||
| 3 | | 3 | ||
| Das Fahrzeug muss im Bereich zwischen 0.15m und 1m vor der Stopplinie immer langsamer fahren. | | Das Fahrzeug muss im Bereich zwischen 0.15m und 1m vor der Stopplinie immer langsamer fahren. | ||
| | | <code>SenKam_Stopplinienflag_bit = 1</code>, <code>15 < SenKam_Stopplinienabstand_f64 <= 100</code> | ||
| 0<< | | <code>0 < BSFVx_Faktor_f64 < 1 </code> | ||
| Bremsen | | Bremsen | ||
| 0<< | | <code>0 < BSFVx_Faktor_f64 < 1 </code> | ||
| | | Gosedopp, Wei | ||
| | | 04.01.2023 | ||
|- | |- | ||
| 4 | | 4 | ||
| Das Fahrzeug bremst bei eingeleiteter Bremsung weiter ab, auch wenn das Stopplinienflag verloren geht. | | Das Fahrzeug bremst bei eingeleiteter Bremsung weiter ab, auch wenn das Stopplinienflag verloren geht. | ||
| | | <code>SenKam_Stopplinienflag_bit = 0</code>, <code>SenKam_Stopplinienabstand_f64 = 0</code> | ||
| 0<< | | <code> 0 < BSFVx_Faktor_f64 < 1 </code> | ||
| Bremsen | | Bremsen | ||
| 0<< | | <code> 0 < BSFVx_Faktor_f64 < 1 </code> | ||
| | | Gosedopp, Wei | ||
| | | 04.01.2023 | ||
|- | |- | ||
| 5 | | 5 | ||
| Das Fahrzeug muss bei Stopplinienerkennung im Bereich weiter als 1m weiter normal fahren. | | Das Fahrzeug muss bei Stopplinienerkennung im Bereich weiter als 1m weiter normal fahren. | ||
| | | <code>SenKam_Stopplinienflag_bit = 1</code>, <code>SenKam_Stopplinienabstand_f64 > 100</code> | ||
| <code> | | <code>BSFVx_Faktor_f64 = 1 </code> | ||
| Nicht unterbrochene Fahrt | | Nicht unterbrochene Fahrt | ||
| <code> | | <code>BSFVx_Faktor_f64 = 1 </code> | ||
| | | Gosedopp, Wei | ||
| | | 04.01.2023 | ||
|- | |||
| 6 | |||
| Liegt eine Vorfahrtssituation vor, muss das Fahrzeug solange warten, bis das Hindernis die Kreuzung überquert hat. | |||
| <code>SenKam_Stopplinienflag_bit = 1</code>, <code>SenKam_Stopplinienabstand_f64 <= 15</code>, <code>Vorfahrtssituation_bit = 1</code> | |||
| <code>BSFVx_Faktor_f64 = 0 </code> | |||
| Fahrzeug wartet, bis Hindernis die Kreuzung überquert hat | |||
| <code>BSFVx_Faktor_f64 = 0 </code> | |||
| Gosedopp, Wei | |||
| 04.01.2023 | |||
|} | |} | ||
Die fehlerfreie Funktionsweise ist zudem im eingefügten Video zu sehen. | |||
[[Datei:SDE Praktikum 20-21 Stoppkreuzung.gif|none|<b>Abbildung 7: Video der Simulation.</b>]] | |||
'''Online-Modell: ''' | |||
{| class="wikitable" style="margin:auto" style="text-align: center; | |||
|+ Tabelle 4: Tests für das Stopplinienverhalten am Fahrzeug. | |||
! style="font-weight: bold;" | ID | |||
! style="font-weight: bold;" | Testfallbeschreibung | |||
! style="font-weight: bold;" | Eingänge | |||
! style="font-weight: bold;" | Ausgang | |||
! style="font-weight: bold;" | Erwartetes Ergebnis | |||
! style="font-weight: bold;" | Testergebnis | |||
! style="font-weight: bold;" | Testperson | |||
! style="font-weight: bold;" | Datum | |||
|- | |||
| 1 | |||
| Das Fahrzeug fährt mit der vorgegebenen Geschwindigkeit, wenn keine Stopplinie erkannt wurde. | |||
| <code>SenKam_StoplinienFlag_bit = 0</code>, <code>SenKam_StoplinienAbst_f64 = 0 </code> | |||
| | |||
| Das Fahrzeug fährt mit Vollgas. | |||
| | |||
| | |||
| | |||
|- | |||
| 2 | |||
| Das Fahrzeug muss im Bereich zwischen 0.15m und 1m vor der Stopplinie immer langsamer fahren. | |||
| <code>SenKam_StoplinienFlag_bit = 1</code>, <code>15 < SenKam_StoplinienAbst_f64 <= 100</code> | |||
| | |||
| Fahrzeug bremst ab. | |||
| | |||
| | |||
| | |||
|- | |||
| 3 | |||
| Das Fahrzeug bremst bei eingeleiteter Bremsung weiter ab, auch wenn das Stopplinienflag verloren geht. | |||
| <code>SenKam_StoplinienFlag_bit = 0</code>, <code>SenKam_StoplinienAbst_f64 = 0</code> | |||
| | |||
| Fahrzeug bremst ab. | |||
| | |||
| | |||
| | |||
|- | |||
| 4 | |||
| Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung so muss es 0.15m vor der Stopplinie anhalten | |||
| <code>SenKam_StoplinienFlag_bit = 1</code>, <code>SenKam_StoplinienAbst_f64 <= 0.15</code> | |||
| | |||
| Fahrzeug stoppt vollständig. | |||
| | |||
| | |||
| | |||
|- | |||
| 5 | |||
| Das Fahrzeug muss bei Stopplinienerkennung im Bereich weiter als 1m weiter normal fahren. | |||
| <code>SenKam_StoplinienFlag_bit = 1</code>, <code>SenKam_StoplinienAbst_f64 > 100</code> | |||
| | |||
| Fahrzeug bremst nicht ab. | |||
| | |||
| | |||
| | |||
|- | |||
| 6 | |||
| Liegt eine Vorfahrtssituation vor, muss das Fahrzeug solange warten, bis das Hindernis die Kreuzung überquert hat. | |||
| <code>SenKam_Stopplinienflag_bit = 1</code>, <code>SenKam_Stopplinienabstand_f64 <= 15</code>, <code>Vorfahrtssituation_bit = 1</code> | |||
| | |||
| Fahrzeug wartet, bis Hindernis die Kreuzung überquert hat | |||
| | |||
| | |||
| | |||
|} | |||
== Simulation einer Vorfahrtssituation == | |||
ACHTUNG! Die lauffähige Version wurde noch nicht in den trunk übertragen, da im Online-Modell noch keine Objektliste vorhanden ist. Dies würde die Software unkompilierbar machen! Die Ergebnisse finden sich allesamt in [https://svn.hshl.de/svn/MTR_SDE_Praktikum/branches/2022_12_14_OSE_Stopplinienverhalten/ diesem Branch] | |||
Um eine Vorfahrtssituation zu simulieren, muss ein dynamisches Hindernis genau dann auf die Kreuzung zu fahren, wenn das CCF ebenfalls darauf zufährt oder schon da steht. Dazu müssen folgende Maßnahmen getroffen werden: | |||
In der <code>start.m</code>-Datei muss als Simulinkmodus 4 und <code>PAR_Modi_Schalter_Fahrbahn_int = 1</code> gewählt werden. Dann muss in dem switch-case, wo der Simulinkmodus abgefragt wird, in Zustand 4 die Startposition des CCF auf | |||
<code>PAR_Esm_x0_I_f64 = 5.04; % Startposition in x_I</code> | |||
<code>PAR_Esm_y0_I_f64 = 0.5441; % Startposition in y_I</code> | |||
<code>PAR_Esm_psi0_I_f64 = 145 * pi/180; % Startausrichtung zu x_I</code> | |||
gesetzt werden. Nun beginnt die Fahrt in der Kurve vor der Kreuzung. Anschließend muss ein passendes Hindernis in der Simulation platziert werden. Hierzu muss in der Parameterdatei <code>param_OSE_offline.m</code> ein Hindernis mit Index <code>aIndex = 368</code> auf Fahrbahn 2 hinzugefügt werden. Danach kann die Simulation gestartet werden. | |||
Aktuelle Version vom 9. Januar 2023, 20:02 Uhr
Autoren: Hagen Heuer, Tim Kruse
Bearbeitet: Daniel Gosedopp, Ran Wei
Betreuer: Prof. Schneider, Prof. Göbel
Einleitung
Ziel ist es, das Verhalten des Fahrzeugs an Stopplinien entsprechend den Anforderungen im Lastenheft zu implementieren. Das Fahrzeug muss nach dem Lastenheft im Falle der Erkennung einer Haltelinie immer langsamer fahren. Befindet sich es an der Stopplinie, so muss es dort stoppen und zwei Sekunden halten. Liegt eine Vorfahrtssituation vor, muss dem Hindernis Vorfahrt gewährt und erst dann weitergefahren werden.
Anforderungen
Im Lastenheft des Projekts Carolo Cup wird die Anforderung an das Verhalten des Fahrzeugs an einer Stopplinie in REQ10.2340 festgehalten (s. Abbildung 1).
-
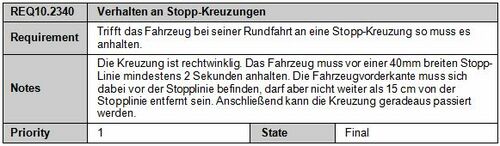 Abbildung 1: Lastenheftauszug Stopplinien-Verhalten.
Abbildung 1: Lastenheftauszug Stopplinien-Verhalten.

Die Umsetzung der Anforderung ist im Pflichtenheft wie folgt festgehalten:
-
 Abbildung 2: Pflichtenheftauszug zu REQ10.2340.
Abbildung 2: Pflichtenheftauszug zu REQ10.2340.

Folgende Anforderungen können festgelegt werden und im späteren Projekt berücksichtigt werden.
- Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung, so muss es 15 cm vor der Stopplinie anhalten.
- Während das Fahrzeug auf die Stopplinie zufährt, muss die Geschwindigkeit des Fahrzeugs gedrosselt werden.
- Das Fahrzeug muss vor der Stoppline halten und 2 Sekunden warten.
- Nach der Wartezeit muss das Fahrzeug die Kreuzung passieren, ohne das die Stopplinie ein weiteres Mal erkannt wird.
- Die Implementierung erfolgt in Matlab-Simulink.
Konzept
Als Basis für die Implementierung diente die vorhandene MATLAB-Funktion für das Verhalten an Stopplinien. Beim Testen dieser Funktion viel unter anderem auf, dass diese nicht lauffähig ist. Außerdem war die Implementierung der Weiterfahrt nach einer Stopplinie fehlerhaft, da das Fahrzeug die vorherige Stopplinie erneut erkennen würde. Daher wurde ein neues Konzept erstellt, in dem Teile der ursprünglichen Idee berücksichtigt wurden. Zunächst werden die externen Ein- und Ausgänge des Moduls definiert:
Grundidee
Das Modul BSF ermittelt unter anderem die Sollgeschwindigkeit des Fahrzeugs. Dies geschieht entweder auf Basis der Kurvenkrümmung oder wird bei Vorhandensein eines Hindernisses als konstant angenommen. Die Grundidee ist es, die Sollgeschwindigkeit bei Erkennung einer Stopplinie mit einem Faktor (Werte von 0 - 1) zu multiplizieren, also immer weiter zu verringern, bis das Fahrzeug 15cm vor der Linie stillsteht. Der Stillstand soll für zwei Sekunden beibehalten werden. Danach soll das Fahrzeug mit unveränderter Sollgeschwindigkeit weiterfahren (Faktor = 1). Den Verlauf des Faktorwertes zeigt Abb. 3.
-
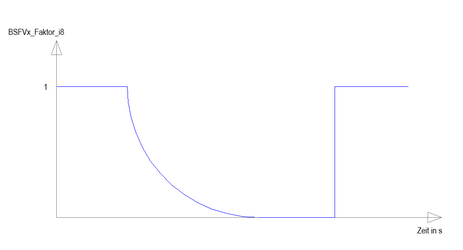 Abbildung 3: Verlauf des Geschwindigkeitsbegrenzungsfaktors
Abbildung 3: Verlauf des Geschwindigkeitsbegrenzungsfaktors

Am Anfang ist der Faktor 1, bis eine Stopplinie erkannt wird. Dann verringert er sich kontinuierlich, bis zum Wert 0, sodass das Auto immer langsamer wird und schließlich 15cm vor der Stopplinie zum Stillstand kommt. Hier wird für zwei Sekunden gewartet. Danach wird der Faktor wieder auf 1 gesetzt, sodass wieder auf errechnete Sollgeschwindigkeit beschleunigt wird.
Festlegung von Ein- und Ausgängen
Zur Umsetzung der Funktion werden zunächst die Ein- und Ausgänge festgelegt. Diese zeigt Tab. 1.
| Art | Variablenname | Beschreibung | Einheit |
|---|---|---|---|
| Eingang | SenKam_Stopplinienabstand_f64 | Abstand von Fahrzeugfront zur Stopplinie | m |
| Eingang | SenKam_Stopplinienflag_bit | Gesetzt, wenn eine Stopplinie erkannt wird | - |
| Eingang | Vorfahrtssituation_bit | Gesetzt, wenn ein Hindernis an der Kreuzung steht. | - |
| Eingang | T | Zykluszeit der Simulation | s |
| Ausgang | BsfVx_Faktor_f64 | Geschwindigkeitsbegrenzungsfaktor, falls Stopplinie erkannt wurde | - |
Programmablauf
Das Programm wird als Zustandsautomat realisiert, dessen Zustandsdiagramm Abbildung 3 zeigt.
-
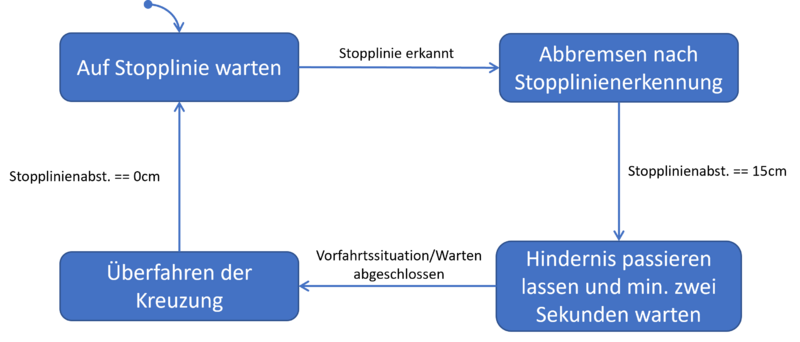 Abb. 3: Progammablaufplan des Stopplinien-Verhaltens.
Abb. 3: Progammablaufplan des Stopplinien-Verhaltens.

Zu Beginn werden Variablen eingelesen und initialisiert. Anschließend erfolgt die Abfrage des Zustands. Das Programm wird hierbei in vier Zustände unterteilt.
Zustand 1 - Auf Stopplinie warten
Im ersten Zustand werden zunächst Variablen an den Ausgang übergeben. Anschließend wird abgefragt, ob das Stopplinienflag 1 ist. Trifft dies zu wird der Zustand auf 2 gesetzt. Wurde keine Stopplinie gefunden, so wird der Zustand nicht gewechselt.
Zustand 2 - Abbremsen nach Stopplinienerkennung
In diesem Zustand wird abgebremst. Ist der Stopplinienabstand kleiner als 15cm, werden die Motoren abgeschaltet und der Zustand auf 3 gesetzt.
Zustand 3 - An Stopplinie warten
In diesem Zustand wird an der Stopplinie gewartet. Liegt keine Vorfahrtssituation vor, beträgt die Wartezeit 2 Sekunden, ansonsten wird solange gewartet, bis das Hindernis die Kreuzung passiert hat.
Zustand 4 - Kreuzung überfahren Hier wird solange gefahren, bis die Stopplinie überquert wurde, der Stopplinienabstand also <= 0 ist. Dies ist nötig, damit die Stopplinie nicht als neue Stopplinie erkannt wird und das Farzeug erneut anhält. Danach wechselt der Automat wieder in den ersten Zustand.
Umsetzung und Ergebnis der Simulation
Die Implementierung des Algorithmus erfolgt in Simulink als Stateflow Chart. Diese wurde nach dem Zustandsdiagramm aus Abbildung 3 aufgebaut. Der Zustandsautomat besitzt als Eingang den Stopplinienabstand. Die Kamera kann die Stopplinie aber nur bis ca. 52cm vor dem Auto sehen, sodass dieser bei Zufahrt auf die Kreuzung interpoliert werden muss. Dies geschieht im Subsystem "Berechnung_Stopplinienabstand". Um zu prüfen, ob eine Vorfahrtssituation vorliegt, muss auf die LiDAR-Objektliste zugegriffen werden. Das passiert im Subsystem "Überprüfung_Vorfahrtssituation". Im Lastenheft findet sich eine Abbildung, die zeigt, welche Bedingung zur Einleitung einer Vorfahrtssituation erfüllt sein muss. Wenn die Bedingung erfüllt ist, wird das "Vorfahrtssituation_bit" gesetzt.
-
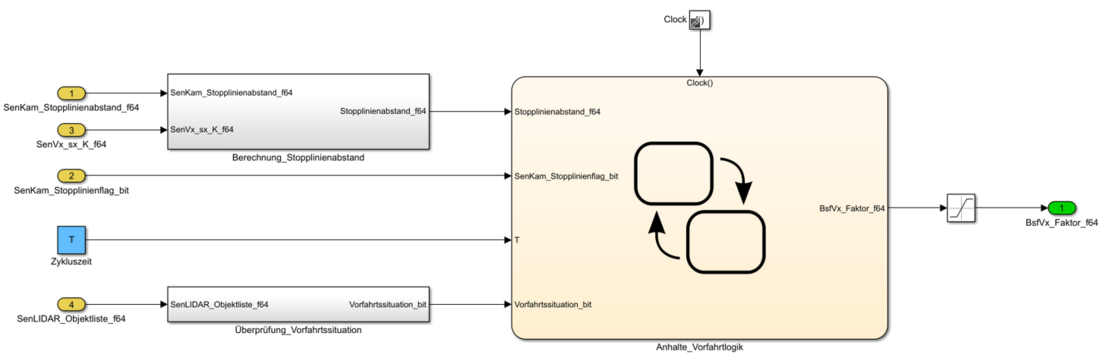 Abbildung 5: Implementierung der Anhalte- und Vorfahrtlogik.
Abbildung 5: Implementierung der Anhalte- und Vorfahrtlogik.

Das Ergebnis des Stopplinienverhalten wird in der nachfolgenden Abbildung dargestellt.
-
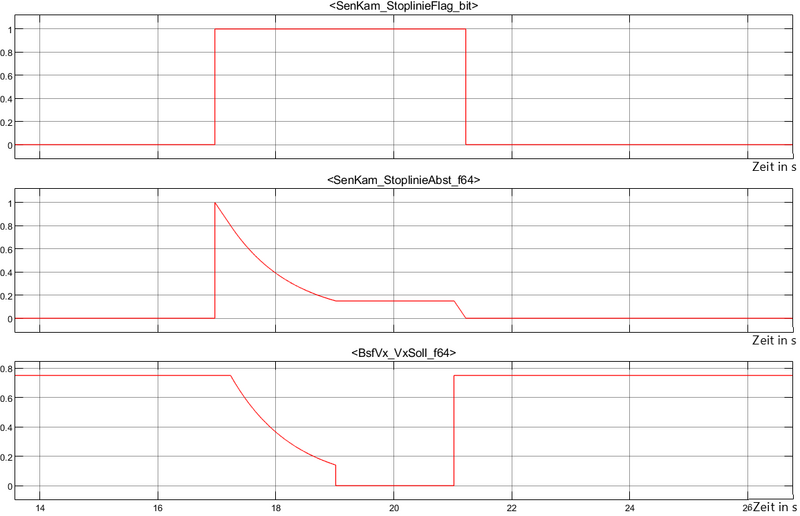 Abbildung 6: Wichtige Variablenwerte beim Test der Funktion.
Abbildung 6: Wichtige Variablenwerte beim Test der Funktion.

Im ersten Diagramm ist das Stopplinienflag zu sehen, welches bei Detektion einer Stopplinie auf Eins wechselt.
Im zweiten Diagramm ist der dazugehörige Stopplinienabstand zu sehen. Dieser ist solange Null, bis eine Stopplinie erkannt wurde. Die Stopplinie kann ab einem Abstand von einem Meter oder weniger erfasst werden. Am Verlauf ist zudem gut zu erkennen, dass das Fahrzeug beginnt zu verzögern, da der Abstand nicht linear abnimmt. Nach der zweisekündigen Wartezeit beschleunigt das Fahrzeug wieder und der Abstand zur Stopplinie nimmt linear weiter ab. Erreicht dieser Null, so wird die Stopplinie überfahren.
Im letzten Diagramm wird die errechnete Sollgeschwindigkeit ausgegeben. Auch an dieser Kurve ist gut zu sehen, dass das Fahrzeug verzögert. Wenn der Abstand 15 cm oder weniger beträgt, werden die Motoren abgeschaltet, da der Faktor auf Null abfällt.
Unit-Test & Integrations-Test
Im Folgenden sind die einzelnen Testfälle für den Unit- und Integrations-Test im Offline- und Online-Modell zu sehen.
Offline-Modell: Durch die Eingabe von Parametern konnten folgende Testfälle in der Simulation geprüft werden.
| ID | Testfallbeschreibung | Eingänge | Ausgang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|---|
| 1 | Das Fahrzeug fährt mit der vorgegebenen Geschwindigkeit, wenn keine Stopplinie erkannt wurde. | SenKam_Stopplinienflag_bit = 0, SenKam_Stopplinienabstand_f64 = 0
|
1 | Vollgas | 1 | Gosedopp, Wei | 04.01.2023 |
| 2 | Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung so muss es 0.15m vor der Stopplinie anhalten | SenKam_Stopplinienflag_bit = 1, SenKam_Stopplinienabstand_f64 <= 0.15
|
0 | Fahrzeug Stoppt | 0 | Gosedopp, Wei | 04.01.2023 |
| 3 | Das Fahrzeug muss im Bereich zwischen 0.15m und 1m vor der Stopplinie immer langsamer fahren. | SenKam_Stopplinienflag_bit = 1, 15 < SenKam_Stopplinienabstand_f64 <= 100
|
0 < BSFVx_Faktor_f64 < 1
|
Bremsen | 0 < BSFVx_Faktor_f64 < 1
|
Gosedopp, Wei | 04.01.2023 |
| 4 | Das Fahrzeug bremst bei eingeleiteter Bremsung weiter ab, auch wenn das Stopplinienflag verloren geht. | SenKam_Stopplinienflag_bit = 0, SenKam_Stopplinienabstand_f64 = 0
|
0 < BSFVx_Faktor_f64 < 1
|
Bremsen | 0 < BSFVx_Faktor_f64 < 1
|
Gosedopp, Wei | 04.01.2023 |
| 5 | Das Fahrzeug muss bei Stopplinienerkennung im Bereich weiter als 1m weiter normal fahren. | SenKam_Stopplinienflag_bit = 1, SenKam_Stopplinienabstand_f64 > 100
|
BSFVx_Faktor_f64 = 1
|
Nicht unterbrochene Fahrt | BSFVx_Faktor_f64 = 1
|
Gosedopp, Wei | 04.01.2023 |
| 6 | Liegt eine Vorfahrtssituation vor, muss das Fahrzeug solange warten, bis das Hindernis die Kreuzung überquert hat. | SenKam_Stopplinienflag_bit = 1, SenKam_Stopplinienabstand_f64 <= 15, Vorfahrtssituation_bit = 1
|
BSFVx_Faktor_f64 = 0
|
Fahrzeug wartet, bis Hindernis die Kreuzung überquert hat | BSFVx_Faktor_f64 = 0
|
Gosedopp, Wei | 04.01.2023 |
Die fehlerfreie Funktionsweise ist zudem im eingefügten Video zu sehen.

Online-Modell:
| ID | Testfallbeschreibung | Eingänge | Ausgang | Erwartetes Ergebnis | Testergebnis | Testperson | Datum |
|---|---|---|---|---|---|---|---|
| 1 | Das Fahrzeug fährt mit der vorgegebenen Geschwindigkeit, wenn keine Stopplinie erkannt wurde. | SenKam_StoplinienFlag_bit = 0, SenKam_StoplinienAbst_f64 = 0
|
Das Fahrzeug fährt mit Vollgas. | ||||
| 2 | Das Fahrzeug muss im Bereich zwischen 0.15m und 1m vor der Stopplinie immer langsamer fahren. | SenKam_StoplinienFlag_bit = 1, 15 < SenKam_StoplinienAbst_f64 <= 100
|
Fahrzeug bremst ab. | ||||
| 3 | Das Fahrzeug bremst bei eingeleiteter Bremsung weiter ab, auch wenn das Stopplinienflag verloren geht. | SenKam_StoplinienFlag_bit = 0, SenKam_StoplinienAbst_f64 = 0
|
Fahrzeug bremst ab. | ||||
| 4 | Trifft das Fahrzeug bei seiner Rundfahrt an eine Stopp-Kreuzung so muss es 0.15m vor der Stopplinie anhalten | SenKam_StoplinienFlag_bit = 1, SenKam_StoplinienAbst_f64 <= 0.15
|
Fahrzeug stoppt vollständig. | ||||
| 5 | Das Fahrzeug muss bei Stopplinienerkennung im Bereich weiter als 1m weiter normal fahren. | SenKam_StoplinienFlag_bit = 1, SenKam_StoplinienAbst_f64 > 100
|
Fahrzeug bremst nicht ab. | ||||
| 6 | Liegt eine Vorfahrtssituation vor, muss das Fahrzeug solange warten, bis das Hindernis die Kreuzung überquert hat. | SenKam_Stopplinienflag_bit = 1, SenKam_Stopplinienabstand_f64 <= 15, Vorfahrtssituation_bit = 1
|
Fahrzeug wartet, bis Hindernis die Kreuzung überquert hat |
Simulation einer Vorfahrtssituation
ACHTUNG! Die lauffähige Version wurde noch nicht in den trunk übertragen, da im Online-Modell noch keine Objektliste vorhanden ist. Dies würde die Software unkompilierbar machen! Die Ergebnisse finden sich allesamt in diesem Branch
Um eine Vorfahrtssituation zu simulieren, muss ein dynamisches Hindernis genau dann auf die Kreuzung zu fahren, wenn das CCF ebenfalls darauf zufährt oder schon da steht. Dazu müssen folgende Maßnahmen getroffen werden:
In der start.m-Datei muss als Simulinkmodus 4 und PAR_Modi_Schalter_Fahrbahn_int = 1 gewählt werden. Dann muss in dem switch-case, wo der Simulinkmodus abgefragt wird, in Zustand 4 die Startposition des CCF auf
PAR_Esm_x0_I_f64 = 5.04; % Startposition in x_I
PAR_Esm_y0_I_f64 = 0.5441; % Startposition in y_I
PAR_Esm_psi0_I_f64 = 145 * pi/180; % Startausrichtung zu x_I
gesetzt werden. Nun beginnt die Fahrt in der Kurve vor der Kreuzung. Anschließend muss ein passendes Hindernis in der Simulation platziert werden. Hierzu muss in der Parameterdatei param_OSE_offline.m ein Hindernis mit Index aIndex = 368 auf Fahrbahn 2 hinzugefügt werden. Danach kann die Simulation gestartet werden.