Robotik und autonome Systeme: Unterschied zwischen den Versionen
Bilder als Referenzen hinzugefügt |
Keine Bearbeitungszusammenfassung |
||
| (5 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Kategorie:Autonome Systeme]] | [[Kategorie:Autonome Systeme]] | ||
[[Datei:RobotikAutonomeSysteme_Hingucker.JPG|500px|rechts]] | [[Datei:RobotikAutonomeSysteme_Hingucker.JPG|500px|rechts]] | ||
| Zeile 59: | Zeile 58: | ||
* Projektwerkstatt – Maschinenraum: Kleine Werkstatt zum Bau von Prototypen | * Projektwerkstatt – Maschinenraum: Kleine Werkstatt zum Bau von Prototypen | ||
* Mechatronikmagazin: Bauteile-Magazin zum Bau von mechatronischen Prototypen | * Mechatronikmagazin: Bauteile-Magazin zum Bau von mechatronischen Prototypen | ||
== Anleitungen == | |||
* [[Einstieg_ROS_2|Einstieg in ROS2]] | |||
* [[Anleitung_zum_einfachen_Einstieg_in_ROS2]] | |||
== Projekte im Themenfeld == | == Projekte im Themenfeld == | ||
| Zeile 67: | Zeile 70: | ||
* [[Entwicklung und Bau von Roboterzellen für Delta-Roboter | Entwicklung und Bau von Roboterzellen für Delta-Roboter]] | * [[Entwicklung und Bau von Roboterzellen für Delta-Roboter | Entwicklung und Bau von Roboterzellen für Delta-Roboter]] | ||
* [[NAO | NAO Roboter]] | * [[NAO | NAO Roboter]] | ||
== Studentische Arbeiten == | |||
Sie suchen ein interessantes Thema für Ihr '''Praxissemester''' oder für Ihre '''Projekt'''-/ '''Bachelor'''-/ '''Masterarbeit'''? <br/> | |||
Sie interessieren sich für Themen im Bereich Robotik und autonome Systeme? <br/> | |||
Studentische Arbeiten als Teilprojekte im Bereich: <br/> | |||
* Entwicklung eines Autonomen Mobilen Roboters (AMR) | |||
* UR3 Roboter lernt Schach spielen | |||
… auch in Kooperation mit Industriepartnern <br/> | |||
=== Entwicklung eines Autonomen Mobilen Roboters (AMR) === | |||
Mögliche Teilprojekte: | |||
* Auswahl der mechanischen Komponenten und Konstruktion der Roboterplattform | |||
* Auswahl der elektronischen Komponenten und Entwicklung eines Schaltplans | |||
* Schnittstelle zwischen Hardware und Software / Ansteuerung über das Robot Operating System (ROS 2) | |||
* Programmierung und Entwicklung der Software für die autonome Navigation | |||
=== UR3 Roboter lernt Schach spielen === | |||
Mögliche Teilprojekte: | |||
* Simulation und Visualisierung des UR3 Roboters mit Schachbrett und Figuren | |||
* Auswahl eines passenden Schach-Algorithmus und Anpassung an das Robot Operating System (ROS 2) | |||
* Entwicklung eines Greifers für das Greifen der Schachfiguren | |||
* Auswahl Kamerasystem und Entwicklung der Objekterkennung für Schachbrett und Figuren | |||
=== Praxissemester Projektteam Wintersemester 2021 / 22 === | |||
[[Praxissemester Projektteam WS2021 | Projektteam Wintersemester 2021 / 22]] | |||
Aktuelle Version vom 6. April 2023, 14:15 Uhr

Autoren:
Einleitung
Das Forschungsgebiet „Robotik und autonome Systeme“ soll an der HSHL etabliert werden. Dies umfasst zum einen das Erforschen relevanter und aktueller Fragestellungen (im Folgenden „Forschung“) und zum anderen die Entwicklung von Lösungen zum Einsatz von Robotik und autonomen Systemen in Unternehmen (im Folgenden „Entwicklung“).
Fokusfelder sind u. a. Bilderkennung/-verarbeitung, maschinelles Lerne und intelligente Montage- und Handhabungstechnik mit industriellen und kollaborativen Robotern. Eine Übersicht über in den Laboren von Prof. Göbel vorhandenen Robotern zeigt die Seite "Robotik & Automatisierung".
Disziplinen des Themenfelds
Forschung
Im Fokusfeld „Kollaboration Roboter/Mensch“ sollen Anwendungen erforscht werden, in denen Mensch und Roboter Hand in Hand zusammenarbeiten, ohne dass eine Gefährdung des Menschen stattfindet und die Anwendung trotzdem effizient und effektiv ist. In diesem Rahmen sollen mit Hilfe von Sensorik intelligente Greifsysteme erforscht werden, die z. B. mittels Kameras und Kraftsensorik heutige Herausforderungen in der Montage- und Handhabung lösen wie z. B. die Handhabung von flexiblen und empfindlichen Gegenständen/Waren.
Ein weiteres spannendes Forschungsfeld, in dem sich die Autoren durch Projekte sowie Industrieerfahrung verdient gemacht haben, ist das Gebiet der autonomen Fahrzeuge. Unabhängig davon ob es sich um Land-, Wasser- oder Luftfahrzeuge handelt, gilt es mit multiplen Sensoren das Umfeld zu erkennen, zu modellieren und das Fahrzeug mit KI darin kollisionsfrei zu steuern. Das können hochautomatisierte Kraftfahrzeuge sein, Paketdrohnen, Wassertaxis bis hin zu Robotern, die eine Museumsführung lebendig gestalten.
In der aktuellen Anfangsphase dieses Forschungsgebiets sollen durch umfassende Recherche und Kontaktaufnahme mit in diesem Bereich aktiven Hochschulen, Universitäten und vor allem der Industrie aktuelle Herausforderungen herausgesucht werden, die im Rahmen von Forschungsprojekten bearbeitet werden. Ganz im Leitgedanken der Hochschulen für angewandte Wissenschaften sollen dabei Herausforderungen gemeistert werden, die in der Industrie benötigt werden.
Entwicklung
Für regionalen Unternehmen wollen die Autoren Entwicklungs-Projekte im Bereich Robotik/Produktionstechnik und autonome Systeme anbieten. Darüber hinaus können damit Partnerschaften für Forschungsprojekte eingegangen werden.
Ein besonderes Fokusfeld ist, komplexe Robotik-Anwendungen zu entwickeln, in denen Roboter z. B. CNC-Fräsen/Drucken oder Dicht-/Klebematerial auftragen. Ein topaktuelles Entwicklungsfeld sind autonome Systeme. Haushaltsroboter (Rasenmäher, Saug- und Wischroboter, etc. sollen zukünftig mit KI effizienter Ihre Aufgabe erfüllen. Hierzu müssen Sie Ihr dynamisches Umfeld kennen lernen und sich mit geschickten Strategien den Wünschen der Besitzer anpassen. Diese Robotersysteme können mobil sein oder auch stationär wie beispielsweise ein autonomes Gewächshaus, effizientes und intelligentes Gebäudemanagement oder Smart-Gardening.
Referenzen
-
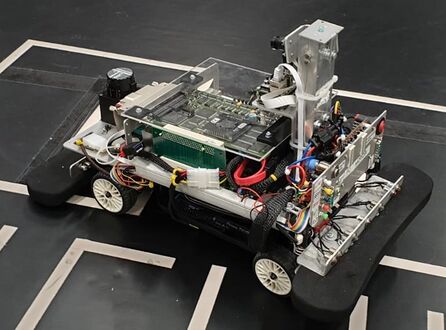 Autonomes Fahrzeug
Autonomes Fahrzeug -
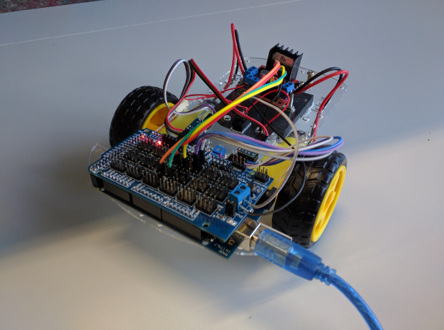
 AlphaBot
AlphaBot -
 ArduMower
ArduMower -
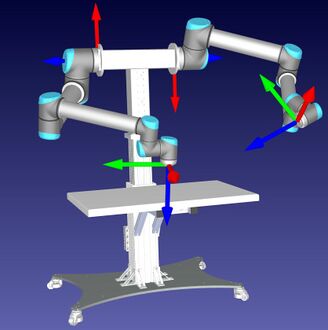 Zweiarmrobotersystem
Zweiarmrobotersystem -
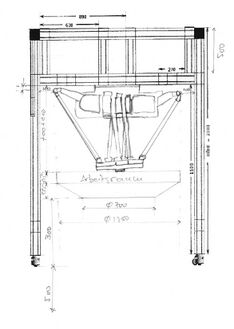 Delta-Roboter
Delta-Roboter -
 Lego Mindstorms Roboter
Lego Mindstorms Roboter -
 5-Achs-Roboter Mitsubishi
5-Achs-Roboter Mitsubishi -
 Carolo Cup AG
Carolo Cup AG -
 NAO Roboter
NAO Roboter
Labore im Themenfeld
- Robotik & Automatisierung: hochmodernes, kollaborierendes Zweiarm-Roboter-System und 3 Industrieroboter
- Autonome Systeme: Rapid Prototyping und Fahrbahn im Maßstab 1:10
- Smart Living: Nachbildung einer häuslichen Situation für haushaltsnahe Robotik
- Produktionstechnik: Verbindung zwischen Robotik und Automatisierungstechnik mit umfassenden produktionstechnischen Aufbauten sowie 2 Delta-Picker-Robotern
- Projektwerkstatt – Maschinenraum: Kleine Werkstatt zum Bau von Prototypen
- Mechatronikmagazin: Bauteile-Magazin zum Bau von mechatronischen Prototypen
Anleitungen
Projekte im Themenfeld
- Roboterfräsen mit einem Industrieroboter
- Gestengesteuerte Fernbedienung eines UR10-Roboters
- Inbetriebnahme eines UR-10 Roboters mit ROS
- Objekterkennung mit ROS und einer Kinect v2 Kamera
- Entwicklung und Bau von Roboterzellen für Delta-Roboter
- NAO Roboter
Studentische Arbeiten
Sie suchen ein interessantes Thema für Ihr Praxissemester oder für Ihre Projekt-/ Bachelor-/ Masterarbeit?
Sie interessieren sich für Themen im Bereich Robotik und autonome Systeme?
Studentische Arbeiten als Teilprojekte im Bereich:
- Entwicklung eines Autonomen Mobilen Roboters (AMR)
- UR3 Roboter lernt Schach spielen
… auch in Kooperation mit Industriepartnern
Entwicklung eines Autonomen Mobilen Roboters (AMR)
Mögliche Teilprojekte:
- Auswahl der mechanischen Komponenten und Konstruktion der Roboterplattform
- Auswahl der elektronischen Komponenten und Entwicklung eines Schaltplans
- Schnittstelle zwischen Hardware und Software / Ansteuerung über das Robot Operating System (ROS 2)
- Programmierung und Entwicklung der Software für die autonome Navigation
UR3 Roboter lernt Schach spielen
Mögliche Teilprojekte:
- Simulation und Visualisierung des UR3 Roboters mit Schachbrett und Figuren
- Auswahl eines passenden Schach-Algorithmus und Anpassung an das Robot Operating System (ROS 2)
- Entwicklung eines Greifers für das Greifen der Schachfiguren
- Auswahl Kamerasystem und Entwicklung der Objekterkennung für Schachbrett und Figuren