Datenübertragung zwischen PC und dSPACE Karte: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (49 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Kategorie:DSPACE]] | |||
== Einleitung == | == Einleitung == | ||
| Zeile 25: | Zeile 23: | ||
</gallery> | </gallery> | ||
<gallery mode = "traditional" widths= | <gallery mode = "traditional" widths=1150px heights=450px> | ||
File:Pflichtenheft WS20 Heuer Kruse.png|Abb. 5: Pflichtenheft | File:Pflichtenheft WS20 Heuer Kruse.png|Abb. 5: Pflichtenheft | ||
</gallery> | </gallery> | ||
| Zeile 31: | Zeile 29: | ||
== Aktuelle Stand des Programms == | == Aktuelle Stand des Programms == | ||
Im ersten Schritt wurden die beiden bestehenden Ansätze im SVN betrachtet und mit einander verglichen. Ziel war es, den aktuellen Stand zu ermitteln und ein Programm auszuwählen, mit dem die Kommunikation umgesetzt | Im ersten Schritt wurden die beiden bestehenden Ansätze im SVN betrachtet und mit einander verglichen. Ziel war es, den aktuellen Stand zu ermitteln und ein bestehendes Programm auszuwählen, mit dem die Kommunikation umgesetzt werden soll. Die Unterschiede und Gemeinsamkeiten der beiden Programme sind in den nachfolgenden Tabelle aufgelistet. | ||
====Vergleich der beiden Programme==== | ====Vergleich der beiden Programme==== | ||
| Zeile 76: | Zeile 74: | ||
|} | |} | ||
Im nächsten Schritt soll nun das bestehende C-Programm getestet werden, um dem Team ein funktionsfähiges Fahrzeug bereitzustellen. Der Test der Software wurde wie in [[Praktikum_SDE|Fahrzeugkommunikation via RS232]] beschrieben erfolgreich durchgeführt. Daher kann dem Team nun eine | Im nächsten Schritt soll nun das bestehende C-Programm getestet werden, um dem Team ein funktionsfähiges Fahrzeug bereitzustellen. Der Test der Software wurde wie in [[Praktikum_SDE|Fahrzeugkommunikation via RS232]] beschrieben erfolgreich durchgeführt. Daher kann dem Team nun eine funktionsfähige Kommunikation mit Übertragung der Spurparameter a, b und c zur Verfügung gestellt werden. | ||
== Konzept für die Übertragung an die dSPACE-Karte == | |||
Für die Übertragung der Daten wurden zwei Konzepte ausgearbeitet. Das erste Konzept arbeitet mit einer statischen Übertragung, bei der immer alle 149 Byte übertragen werden. Zudem muss die Byte-Ordnung der Variablen im Speicher getauscht werden. Der PC auf dem das C-Programm arbeitet mit little-endian, wohingegen die dSPACE-Karte big-endian verwendend. Die Rotation erfolgt letztlich durch einen Zugriff auf die Speicherzelle mittels Zeiger und einem Versand in umgedrehter Reigenfolge. Hierdurch wird zu nächst das letzte Element der Variable versandt. | |||
[[File:Send_Data_Big_Endian_First.png|Abb. 6: Statische Übertragung|none|1200px]] | |||
Das zweite Konzept vergleicht zunächst den Wert der alten Variable mit dem Wert der neuen Variable. Wird hierbei ein Grenzwert überschritten oder kommt es zu einem Flankenwechsel, so werden die Daten übertragen. Fall nicht, wird auf die Übertragung dieser Daten verzichtet und das nächste Datenpaket überprüft. Die Daten werden hierbei in drei Gruppen/Datenpakete eingeteilt: Spurdaten, Stopplinie und Lidar-Objekte. Durch diese Methode kann letztlich die Menge der versendeten Daten stark verringert werden. Im Worst Case werden weiterhin 149 Byte versendet. Im Best Case hingegen kann auf eine Übertragung der Daten verzichtet werden. | |||
[[File:Sende_Daten.png|Abb. 7: Dynamsiche Übertragung|1300px|none|righte]] | |||
[[File:Auswahl_Daten.png|Abb. 8: Auswahl, welche Daten dynamisch übertragen werden|900px|right|none]] | |||
Für eine erfolgreiche Kommunikation muss zudem ein Handshake durchgeführt werden. Mit diesem wird die Verbindung zwischen PC und dSPACE-Karte getestet. Der Handshake ist hierbei in beiden Programmen gleich umgesetzt. Zunächst sendet die dSPACE Karte ein Startbyte an den PC. Dieser reagiert mit einem weiteren Startbyte. Empfängt die dSPACE Karte dieses Startbyte, so sendet sie ein ACK und bestätigt somit den Eingang der Daten. Durch den Empfang des ACK am PC ist der Handshake abgeschlossen. | |||
[[File:HandshakeRS232.png|Abb. 9: Handshake|900px|right]] | |||
Aufgrund des fehlenden Zugriffs auf Matlab/Simulink wird nun das Konzept für die statische Übertragung umgesetzt. Hierbei muss das Matlab-Programm nicht verändert werden. Zudem ist die Implementierung der dynamischen Übertragung zeitaufwendig und schwierig, da am Ende die Regelparameter der Längs- und Querregelung angepasst werden müssen. Dies liegt daran, dass je nach Grenzwert, ab dem Daten übertragen werden, die Störgröße stark abweicht und größere Sprünge macht. Dies muss durch die Regelparameter berücksichtigt und abgefangen werden. Da das Fahrzeug derzeit noch nicht fährt, wird hierfür zwangsläufig die Zeit fehlen. Es ist jedoch ein Ansatz, der von dem nachfolgenden Semester umgesetzt werden kann. | |||
== Konzept für die Übertragung == | == Konzept für die Übertragung an den PC == | ||
Für | Für das Versenden der beiden Daten an den PC wurde ebenfalls ein Konzept erarbeitet. Um ein effizientes Programm zu ermöglichen, sollte bei Empfang von Daten im Eingangspuffer ein Interrupt oder Event ausgelöst werden. Nach einiger Recherche sind wir auf die fileapi von Microsoft gestoßen, welcher bereits beim Senden und Empfangen von Daten eingesetzt wird. Innerhalb der fileapi gibt es die Funktion WaitCommEvent, mit dessen Hilfe auf ein Event am Eingangspuffer gewartet werden kann. Jedoch ist hierbei das Problem, dass die Funktion solange wartet, bis Daten empfangen wurden. Hierdurch stoppt das gesamte Programm an dieser Stelle. Um diese Problematik zu umgehen, wird der Empfang der Daten in einem zweiten Thread umgesetzt. Hierdurch kann der Hauptthread weiterarbeiten und auf empfangene Daten im zweiten Thread reagieren. | ||
Das Konzept hierfür ist der nachfolgenden Abbildung zu sehen. | |||
[[File:Empfange_daten.png|Abb. 10: Empfangen von Daten am PC|800px|right]] | |||
File: | |||
== Programmierung == | == Programmierung == | ||
Die Programmierung der Kommunikation via RS232 wurde in Visual Studio umgesetzt. | Die Programmierung der Kommunikation via RS232 wurde in Visual Studio umgesetzt. | ||
Wie bereits erwähnt, wird der Empfang von Daten am PC mit Hilfe eines zweiten Thread umgesetzt. Hierdurch kann das Hauptprogramm weiter arbeiten, während auf Daten gewartet wird. Durch den zweiten Thread wird jedoch die Möglichkeit des Debuggen eingeschränkt, da zwischen zwei Threads gewechselt wird. Zudem muss die Lebenszeit des zweiten Thread durch den Hauptthread verwaltet werden. Da derzeit die empfangenen Daten noch nicht weiter verwendet werden, wird die Erstellung des zweiten Threads per define aus kommentiert. Hierdurch kann es zu keinen unerwartete Problemen bei Ausführung des Programms kommen. Das Einbinden des zweiten Thread kann in der allneeded.h eingestellt werden. | |||
== Komponententest == | == Komponententest == | ||
Abschließend wurde der nachfolgende Komponententest durchgeführt, um die Funktion des Moduls Kommunikation zu testen. Hierbei wurde insbesondere der Handshake, das Senden und Empfangen sowie die Änderung der Bytereihenfolge getestet. Wie in der nachfolgenden Abbildung zu sehen, wurden alle Testfälle erfolgreich abgeschlossen. Daher lässt sich sagen, dass das Modul Kommunikation zum derzeitigen Stand voll funktionsfähig ist. | |||
<gallery mode = "traditional" widths=1150px heights=290px> | |||
File:Komponententest RS232Comm.png|Abb. 11: Komponententest | |||
</gallery> | |||
== Zusammenfassung == | == Zusammenfassung == | ||
Die Kommunikation findet über RS232 statt und wird durch ein in C/C++ geschriebenes Programm auf dem PC gesteuert. Sie kann mit dem aktuellen Stand alle Daten von der Spurerkennung, der Stopplinienerkennung und dem Lidar zur dSpace-Karte übertragen. Außerdem ist können Daten von der dSpace-Karte am PC empfangen werden. Aktuell arbeitet die Kommunikation mit einer Baudrate von 19200. Das maximum der dSpace-Karte liegt eigentlich bei 115200. Diese Geschwindigkeit kann jedoch nicht erreicht werden, da bei einer höheren Baudrate als 19200 ein Taskoverrun auftritt. Die dSpace-Karte kann dann die von der Kommunikation ausgelösten Interrupts nicht schnell genug abarbeiten. Dieses Problem genauer zu untersuchen und wenn möglich zu lösen ist eine mögliche Aufgabe für ein folgendes Team. | |||
---- | ---- | ||
→ zurück zum Hauptartikel: [[Praktikum_SDE|SDE Praktikum Autonomes Fahren]] | → zurück zum Hauptartikel: [[Praktikum_SDE|SDE Praktikum Autonomes Fahren]] | ||
Aktuelle Version vom 22. April 2026, 09:46 Uhr
Einleitung
Der folgende Artikel beschäftigt sich mit der Kommunikation zwischen dem PC und der dSPACE Karte. Die Kommunikation erfolgt hierbei mittels einer RS232-Schnittstelle. Über diese Schnittstelle wird unteranderem das Spurpolynom sowie Lidar-Daten versendet. Eine genaue Beschreibung, welche Daten übertragen werden, ist in Abbildung X zu sehen. Hier werden zudem die Datentypen genannt.
Für die Bearbeitung der Aufgabe wird zunächst der aktuelle Stand des Fahrzeugs ermittelt, da bereits eine RS232 Kommunikation besteht. Diese wird zunächst getestet. Anschließend wird die Struktur des C-Programm überarbeitet, da Funktionen des C-Programms des Vorsemesters ausgelagert werden. Im letzten Schritt soll die Datenübertragungsrate nach Möglichkeit erhöht werden und fehlende Daten übertragen werden. Diese Teilaufgabe wird durch Funktionstest abgeschlossen.
Anforderungen
-
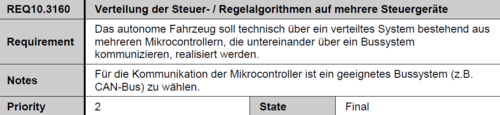 Abb. 1: Lastenheft REQ10.3160
Abb. 1: Lastenheft REQ10.3160

-
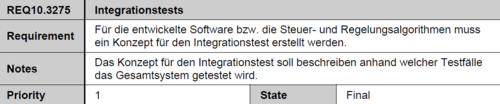 Abb. 2: Lastenheft REQ10.3275
Abb. 2: Lastenheft REQ10.3275

-
 Abb. 3: Lastenheft REQ10.3280
Abb. 3: Lastenheft REQ10.3280

-
 Abb. 4: Lastenheft REQ10.3290
Abb. 4: Lastenheft REQ10.3290

-
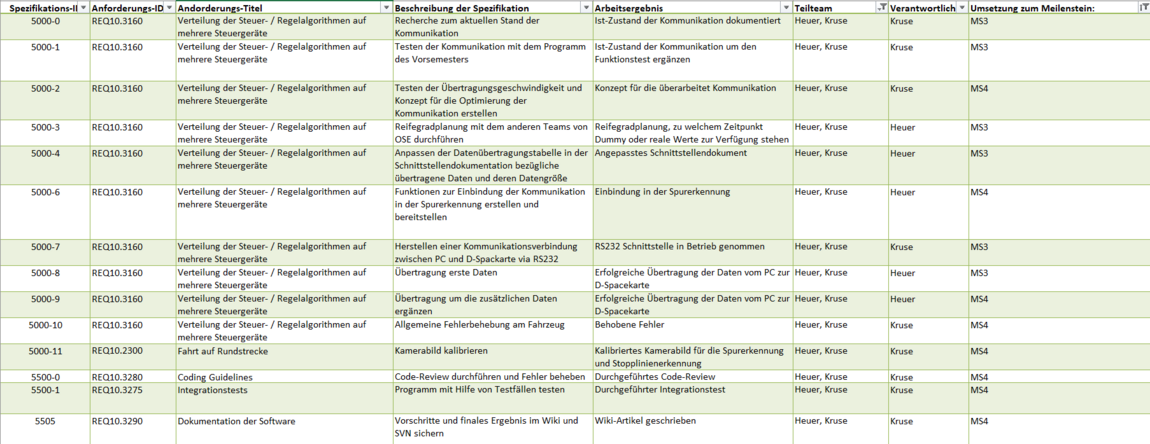 Abb. 5: Pflichtenheft
Abb. 5: Pflichtenheft

Aktuelle Stand des Programms
Im ersten Schritt wurden die beiden bestehenden Ansätze im SVN betrachtet und mit einander verglichen. Ziel war es, den aktuellen Stand zu ermitteln und ein bestehendes Programm auszuwählen, mit dem die Kommunikation umgesetzt werden soll. Die Unterschiede und Gemeinsamkeiten der beiden Programme sind in den nachfolgenden Tabelle aufgelistet.
Vergleich der beiden Programme
| OSE_Fusion_Final_Software | OSE_Draufsicht_Spurpolynom_RS232 | Gemeinsamkeiten |
|---|---|---|
| Baudrate von 19200 | Baudrate von 115200 | |
| Alle Daten werden bereits übertragen | Spurparameter a,b und c werden übertragen | |
| Daten werden aufwendig einzeln verschickt | Versand der Daten effektiv in for-Schleife gelöst | |
| Übergabe an Funktion zum Senden gut gelöst, da Daten als struct übergeben werden | Spurparameter werden einzeln an Funktion zum Senden übergeben | |
| Vertauschen der Byte-Ordnung aufwendig gelöst und teilweise überflüssig | Vertauschen der Byte-Ordnung durch den Einsatz von Zeigern sehr gut implementiert | |
| Verschachtelte Funktionsaufrufe zum Übertragen der Daten | ||
| Unter Visual Studio 2019 nicht lauffähig | Unter Visual Studio 2019 lauffähig | |
| Kamera bereits eingebunden | ||
| Einbindung des Lidars vorhanden | Einbindung des Lidars nicht vorhanden |
Im nächsten Schritt soll nun das bestehende C-Programm getestet werden, um dem Team ein funktionsfähiges Fahrzeug bereitzustellen. Der Test der Software wurde wie in Fahrzeugkommunikation via RS232 beschrieben erfolgreich durchgeführt. Daher kann dem Team nun eine funktionsfähige Kommunikation mit Übertragung der Spurparameter a, b und c zur Verfügung gestellt werden.
Konzept für die Übertragung an die dSPACE-Karte
Für die Übertragung der Daten wurden zwei Konzepte ausgearbeitet. Das erste Konzept arbeitet mit einer statischen Übertragung, bei der immer alle 149 Byte übertragen werden. Zudem muss die Byte-Ordnung der Variablen im Speicher getauscht werden. Der PC auf dem das C-Programm arbeitet mit little-endian, wohingegen die dSPACE-Karte big-endian verwendend. Die Rotation erfolgt letztlich durch einen Zugriff auf die Speicherzelle mittels Zeiger und einem Versand in umgedrehter Reigenfolge. Hierdurch wird zu nächst das letzte Element der Variable versandt.

Das zweite Konzept vergleicht zunächst den Wert der alten Variable mit dem Wert der neuen Variable. Wird hierbei ein Grenzwert überschritten oder kommt es zu einem Flankenwechsel, so werden die Daten übertragen. Fall nicht, wird auf die Übertragung dieser Daten verzichtet und das nächste Datenpaket überprüft. Die Daten werden hierbei in drei Gruppen/Datenpakete eingeteilt: Spurdaten, Stopplinie und Lidar-Objekte. Durch diese Methode kann letztlich die Menge der versendeten Daten stark verringert werden. Im Worst Case werden weiterhin 149 Byte versendet. Im Best Case hingegen kann auf eine Übertragung der Daten verzichtet werden.


Für eine erfolgreiche Kommunikation muss zudem ein Handshake durchgeführt werden. Mit diesem wird die Verbindung zwischen PC und dSPACE-Karte getestet. Der Handshake ist hierbei in beiden Programmen gleich umgesetzt. Zunächst sendet die dSPACE Karte ein Startbyte an den PC. Dieser reagiert mit einem weiteren Startbyte. Empfängt die dSPACE Karte dieses Startbyte, so sendet sie ein ACK und bestätigt somit den Eingang der Daten. Durch den Empfang des ACK am PC ist der Handshake abgeschlossen.

Aufgrund des fehlenden Zugriffs auf Matlab/Simulink wird nun das Konzept für die statische Übertragung umgesetzt. Hierbei muss das Matlab-Programm nicht verändert werden. Zudem ist die Implementierung der dynamischen Übertragung zeitaufwendig und schwierig, da am Ende die Regelparameter der Längs- und Querregelung angepasst werden müssen. Dies liegt daran, dass je nach Grenzwert, ab dem Daten übertragen werden, die Störgröße stark abweicht und größere Sprünge macht. Dies muss durch die Regelparameter berücksichtigt und abgefangen werden. Da das Fahrzeug derzeit noch nicht fährt, wird hierfür zwangsläufig die Zeit fehlen. Es ist jedoch ein Ansatz, der von dem nachfolgenden Semester umgesetzt werden kann.
Konzept für die Übertragung an den PC
Für das Versenden der beiden Daten an den PC wurde ebenfalls ein Konzept erarbeitet. Um ein effizientes Programm zu ermöglichen, sollte bei Empfang von Daten im Eingangspuffer ein Interrupt oder Event ausgelöst werden. Nach einiger Recherche sind wir auf die fileapi von Microsoft gestoßen, welcher bereits beim Senden und Empfangen von Daten eingesetzt wird. Innerhalb der fileapi gibt es die Funktion WaitCommEvent, mit dessen Hilfe auf ein Event am Eingangspuffer gewartet werden kann. Jedoch ist hierbei das Problem, dass die Funktion solange wartet, bis Daten empfangen wurden. Hierdurch stoppt das gesamte Programm an dieser Stelle. Um diese Problematik zu umgehen, wird der Empfang der Daten in einem zweiten Thread umgesetzt. Hierdurch kann der Hauptthread weiterarbeiten und auf empfangene Daten im zweiten Thread reagieren.
Das Konzept hierfür ist der nachfolgenden Abbildung zu sehen.

Programmierung
Die Programmierung der Kommunikation via RS232 wurde in Visual Studio umgesetzt. Wie bereits erwähnt, wird der Empfang von Daten am PC mit Hilfe eines zweiten Thread umgesetzt. Hierdurch kann das Hauptprogramm weiter arbeiten, während auf Daten gewartet wird. Durch den zweiten Thread wird jedoch die Möglichkeit des Debuggen eingeschränkt, da zwischen zwei Threads gewechselt wird. Zudem muss die Lebenszeit des zweiten Thread durch den Hauptthread verwaltet werden. Da derzeit die empfangenen Daten noch nicht weiter verwendet werden, wird die Erstellung des zweiten Threads per define aus kommentiert. Hierdurch kann es zu keinen unerwartete Problemen bei Ausführung des Programms kommen. Das Einbinden des zweiten Thread kann in der allneeded.h eingestellt werden.
Komponententest
Abschließend wurde der nachfolgende Komponententest durchgeführt, um die Funktion des Moduls Kommunikation zu testen. Hierbei wurde insbesondere der Handshake, das Senden und Empfangen sowie die Änderung der Bytereihenfolge getestet. Wie in der nachfolgenden Abbildung zu sehen, wurden alle Testfälle erfolgreich abgeschlossen. Daher lässt sich sagen, dass das Modul Kommunikation zum derzeitigen Stand voll funktionsfähig ist.
-
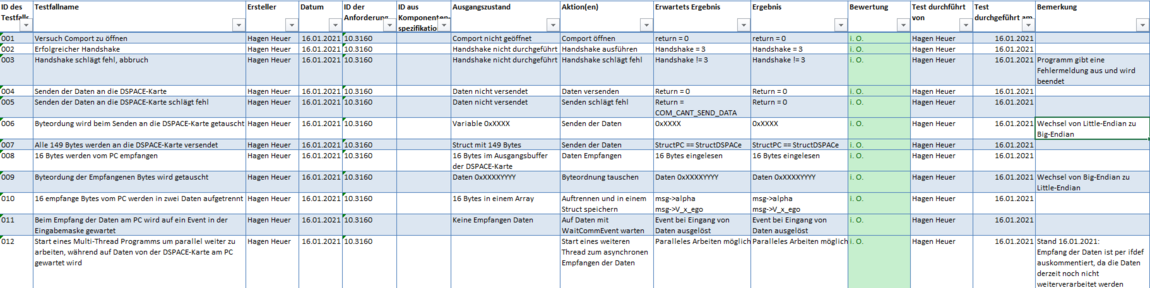 Abb. 11: Komponententest
Abb. 11: Komponententest

Zusammenfassung
Die Kommunikation findet über RS232 statt und wird durch ein in C/C++ geschriebenes Programm auf dem PC gesteuert. Sie kann mit dem aktuellen Stand alle Daten von der Spurerkennung, der Stopplinienerkennung und dem Lidar zur dSpace-Karte übertragen. Außerdem ist können Daten von der dSpace-Karte am PC empfangen werden. Aktuell arbeitet die Kommunikation mit einer Baudrate von 19200. Das maximum der dSpace-Karte liegt eigentlich bei 115200. Diese Geschwindigkeit kann jedoch nicht erreicht werden, da bei einer höheren Baudrate als 19200 ein Taskoverrun auftritt. Die dSpace-Karte kann dann die von der Kommunikation ausgelösten Interrupts nicht schnell genug abarbeiten. Dieses Problem genauer zu untersuchen und wenn möglich zu lösen ist eine mögliche Aufgabe für ein folgendes Team.
→ zurück zum Hauptartikel: SDE Praktikum Autonomes Fahren