Projekt 41b: Temperaturregelkreis: Unterschied zwischen den Versionen
| (24 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 23: | Zeile 23: | ||
== Einleitung == | == Einleitung == | ||
Der Temperraturregelkreis stellt hier dar,das Verhalten von alle Reglertypen bzw ein P, PI und ein PID und wird auch hier unterschiedlicher Parametrierungen . In Diesem versuch wird die Temperatur des Aluminiumblocks auf der Oberseite des Versuchsaufbaus, welcher durch die Heißseite des Peltierelementes erwärmt und durch den Lüfter gekühlt wird. | Der Temperraturregelkreis stellt hier dar,das Verhalten von alle Reglertypen bzw ein P, PI und ein PID und wird auch hier unterschiedlicher Parametrierungen beobachten . In Diesem versuch wird die Temperatur des Aluminiumblocks auf der Oberseite des Versuchsaufbaus, welcher durch die Heißseite des Peltierelementes erwärmt wird und durch den Lüfter gekühlt wird. | ||
Die Solltemperatur bzw Sollwert kann über ein Potentiometer auf der Oberseite des Gehäuses einsgetellt werden. Ausserdem sind die 3 Potentiometer auf der Vorderseite zur Änderung der P-, I- und D-Anteile des Reglers vorgesehen. Das ziel ist hier der Istwert der Temperatur des Aluminiumblocks durch einen NTC-Thermistor der sich zwischen Heißseite des Peltierelements und dem Block befindet . | Die Solltemperatur bzw Sollwert kann über ein Potentiometer auf der Oberseite des Gehäuses einsgetellt werden. Ausserdem sind die 3 Potentiometer auf der Vorderseite zur Änderung der P-, I- und D-Anteile des Reglers vorgesehen. Das ziel ist hier der Istwert der Temperatur des Aluminiumblocks durch einen NTC-Thermistor der sich zwischen Heißseite des Peltierelements und dem Block befindet . | ||
== | == Aufbau und Führungsverhalten des Regelkreises == | ||
=== | ==mechanicher und elektrotechnischer Aufbau== | ||
[[Datei:Aufbau Temperaturregelkreis.png]] | |||
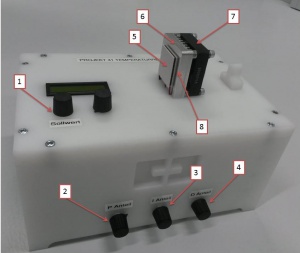
Das erste Bild zeigt hier: Die Potentiometer [1, 2, 3, 4], das Peltierelement [5], den Aluminiumblock [6], den Lüfter [7] sowie den NTC-Thermistor [8]. | |||
[[Datei:Arduino.png]] | |||
das zweites Bild stellt hier dar wo das Arduino Uno gesteckt ist. | |||
in Hintere Seite der Buchse ist die Verbindung ducrh das Arduino Uno und der Buchse zu sehen. | |||
==Electrotechnischer Aufbau== | |||
Bauteilen: | |||
Computerlüfter 5V DC | |||
Peltierelement | |||
3 LED's | |||
NTC-Thermistor | |||
5 Potentiometer (10kOhm) | |||
LCD-Display | |||
Arduino Uno | |||
Dieser Klemmbelegungsplan wurde anhand des bereits fertigen Versuchsaufbaus erstellt: | |||
[[Datei:Elektrotechnischer Aufbau.PNG]] | |||
=== Aussehen einer Temperaturreglerkreis(Allgemeine)=== | |||
[[Datei:Allgemeines Temperaturregelkreis.PNG]] | |||
Führungsverhalten des Regelkreises | |||
wenn man die Sprungantwort eines Regelkreises simulieren möchte und die Übertragungsfunktion bestimmen, muss ein Einheitssprung auf die Regelstrecke gegeben werden. Da das Peltierelement (aluminiumoxyde) wird mit Hochspanung / dauerspanung versorgt wird, wurde der Aluminiumblock auf Maximaltemperatur aufgeheizt(), um danach einen Einheitssprung auf die Stellgröße zugeben. Danach wurde das ganz durch die maximale Lüfterdrehzahl umgesetzt. | |||
regelstrecke mit Arduino | |||
Funktion PT1Messung() | |||
Bildet einen Tiefpassfilter (RC-Glied) nach. | |||
bool PT1Messung(float &FiltVal, byte Kanal, unsigned long Periode, unsigned long Tau) | |||
{ | |||
static unsigned long lastRun = 0; | |||
unsigned long FF = Tau / Periode; // | |||
if (millis()-lastRun < Periode) return false; | |||
unsigned int neuWert = analogRead(Kanal); | |||
FiltVal= ((FiltVal * FF) + neuWert) / (FF+1); | |||
lastRun = millis(); | |||
return true; | |||
} // ende Funktion PT1Messung // Pindefinitionen | |||
const byte PWMOut = 9; | |||
const byte AnalogIn = A0; | |||
void setup() { | |||
pinMode(PWMOut, OUTPUT); | |||
} | |||
void loop() { | |||
static float FiltVal; | |||
if (PT1Messung(FiltVal, AnalogIn, 10, 1000) ) | |||
analogWrite(PWMOut, (int)FiltVal / 4) ; // PWM auf 0 .. 255 skalieren | |||
} | |||
== Ergebnis == | == Ergebnis == | ||
| Zeile 37: | Zeile 105: | ||
== Zusammenfassung == | == Zusammenfassung == | ||
=== Lessons Learned === | === Lessons Learned === | ||
Das versuch sollte hier der theorischen Grungkenntnisse aus dem Volesung Mess und Regelungstechnik hier im Praktik bringen.In dem dass, wir im Mess und Regelungstechnik immer dieser vergleich zwischen ein P- PI- und PID regler gemacht haben.Wenn sollten immer bevorzugen der jenigen Regler,der keine Abweichungen aufweisen. Aufgrund der Krankheit während des Semester und da auch das echt schwer zu machen war,konnten wir leider das ganze zu ende bringen. | |||
== Projektunterlagen == | == Projektunterlagen == | ||
Aktuelle Version vom 18. Januar 2019, 08:13 Uhr
Autoren: Ngono Onana, Donfouet
Betreuer: Daniel Klein
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)
Aufgabe
Erstellung einer Regelung für ein Heizfläche-Lüfter-System. Der Laborversuch ist bereits mechanisch wie elektrisch fertig.
Erwartungen an Ihre Projektlösung
- Darstellung der Theorie
- Entwurf eines Regelkreises
- Recherche zu bestehenden Lösungen
- Systemidentifikation (Übertragungsfunktion der Regelstrecke bestimmen)
- Vergleichen und bewerten Sie verschiedene Regleransätze (2-Punkt, 3-Punkt, P, I, D), Darstellung der Soll-/Istgrößen.
- Programmiersprache: C
- Test und wiss. Dokumentation
- Live Vorführung während der Abschlusspräsentation
Einleitung
Der Temperraturregelkreis stellt hier dar,das Verhalten von alle Reglertypen bzw ein P, PI und ein PID und wird auch hier unterschiedlicher Parametrierungen beobachten . In Diesem versuch wird die Temperatur des Aluminiumblocks auf der Oberseite des Versuchsaufbaus, welcher durch die Heißseite des Peltierelementes erwärmt wird und durch den Lüfter gekühlt wird. Die Solltemperatur bzw Sollwert kann über ein Potentiometer auf der Oberseite des Gehäuses einsgetellt werden. Ausserdem sind die 3 Potentiometer auf der Vorderseite zur Änderung der P-, I- und D-Anteile des Reglers vorgesehen. Das ziel ist hier der Istwert der Temperatur des Aluminiumblocks durch einen NTC-Thermistor der sich zwischen Heißseite des Peltierelements und dem Block befindet .
Aufbau und Führungsverhalten des Regelkreises
mechanicher und elektrotechnischer Aufbau

Das erste Bild zeigt hier: Die Potentiometer [1, 2, 3, 4], das Peltierelement [5], den Aluminiumblock [6], den Lüfter [7] sowie den NTC-Thermistor [8].


das zweites Bild stellt hier dar wo das Arduino Uno gesteckt ist.
in Hintere Seite der Buchse ist die Verbindung ducrh das Arduino Uno und der Buchse zu sehen.
Electrotechnischer Aufbau
Bauteilen: Computerlüfter 5V DC
Peltierelement
3 LED's
NTC-Thermistor
5 Potentiometer (10kOhm)
LCD-Display
Arduino Uno
Dieser Klemmbelegungsplan wurde anhand des bereits fertigen Versuchsaufbaus erstellt:

Aussehen einer Temperaturreglerkreis(Allgemeine)

Führungsverhalten des Regelkreises
wenn man die Sprungantwort eines Regelkreises simulieren möchte und die Übertragungsfunktion bestimmen, muss ein Einheitssprung auf die Regelstrecke gegeben werden. Da das Peltierelement (aluminiumoxyde) wird mit Hochspanung / dauerspanung versorgt wird, wurde der Aluminiumblock auf Maximaltemperatur aufgeheizt(), um danach einen Einheitssprung auf die Stellgröße zugeben. Danach wurde das ganz durch die maximale Lüfterdrehzahl umgesetzt.
regelstrecke mit Arduino
Funktion PT1Messung()
Bildet einen Tiefpassfilter (RC-Glied) nach.
bool PT1Messung(float &FiltVal, byte Kanal, unsigned long Periode, unsigned long Tau)
{
static unsigned long lastRun = 0; unsigned long FF = Tau / Periode; // if (millis()-lastRun < Periode) return false; unsigned int neuWert = analogRead(Kanal); FiltVal= ((FiltVal * FF) + neuWert) / (FF+1); lastRun = millis(); return true;
} // ende Funktion PT1Messung // Pindefinitionen
const byte PWMOut = 9; const byte AnalogIn = A0;
void setup() {
pinMode(PWMOut, OUTPUT);
}
void loop() {
static float FiltVal; if (PT1Messung(FiltVal, AnalogIn, 10, 1000) ) analogWrite(PWMOut, (int)FiltVal / 4) ; // PWM auf 0 .. 255 skalieren
}
Ergebnis
Zusammenfassung
Lessons Learned
Das versuch sollte hier der theorischen Grungkenntnisse aus dem Volesung Mess und Regelungstechnik hier im Praktik bringen.In dem dass, wir im Mess und Regelungstechnik immer dieser vergleich zwischen ein P- PI- und PID regler gemacht haben.Wenn sollten immer bevorzugen der jenigen Regler,der keine Abweichungen aufweisen. Aufgrund der Krankheit während des Semester und da auch das echt schwer zu machen war,konnten wir leider das ganze zu ende bringen.
Projektunterlagen
YouTube Video
Weblinks
Literatur
→ zurück zur Übersicht: WS 18/19: Fachpraktikum Elektrotechnik (MTR)