Legosortiermaschine gesamte Anlage: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (163 dazwischenliegende Versionen von 7 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
Dies ist ein Unterartikel von der [http://193.175.248.52/wiki/index.php/Legoteil_Z%C3%A4hlmaschine | Dies ist ein Unterartikel von der [http://193.175.248.52/wiki/index.php/Legoteil_Z%C3%A4hlmaschine Legoteil Zählmaschine], wo Aufgaben bezogen auf die ganze Anlage beschrieben werden. | ||
= | =Anforderungen= | ||
{| class="wikitable" | |||
|- | |||
!Spezifikations-ID | |||
!Anforderungs-ID | |||
!Anforderungstitel | |||
!Beschreibung der Spezifikation | |||
!Arbeitsergebnis | |||
|- | |||
|- | |||
| 0057 | |||
| REQ10.2041 | |||
| Sicherheit/ Gefährdungsbeurteilung | |||
| Schaltschrank verdrahten | |||
| [http://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/22_Pruefprotokolle/Inbetriebnahmeprotokoll.docx Inbetriebnahmeprotokoll] | |||
|- | |||
| 0010 | |||
| REQ10.2000 | |||
| Eigenständige Funktionsweise der Sortiermaschine | |||
| Funktionsfähig ohne Verbindung zu einem anderen System und ohne menschliche Eingriffe | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/22_Pruefprotokolle/Inbetriebnahmeprotokoll.docx Inbetriebnahmeprotokoll] | |||
|- | |||
| 0052 | |||
| REQ10.2040 | |||
| Sicherheit / Gefährdungsbeurteilung | |||
| Mechanische Sicherheit (Einklemmschutz) | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/22_Pruefprotokolle/Inbetriebnahmeprotokoll.docx Inbetriebnahmeprotokoll] | |||
|- | |||
| 0053 | |||
| REQ10.2040 | |||
| Sicherheit/ Gefährdungsbeurteilung | |||
| Erstellen einer Gebrauchsanleitung im Wiki | |||
| [http://193.175.248.52/wiki/index.php/Anleitung_Legoteilz%C3%A4hlmaschine Wiki-Artikel] | |||
|- | |||
| 0054 | |||
| REQ10.2040 | |||
| Sicherheit / Gefährdungsbeurteilung | |||
| Erstellen einer Schritt-für-Schritt Anleitung im Wiki | |||
| [http://193.175.248.52/wiki/index.php/Anleitung_Legoteilz%C3%A4hlmaschine Wiki-Artikel] | |||
|- | |||
| 0300 | |||
| REQ10.3200 | |||
| Projektplanung | |||
| MS Project verwenden | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/26_Projektplan/2018/Projektplan18.mpp Dokument] | |||
|- | |||
| 0310 | |||
| REQ10.3210 | |||
| Versionsverwaltung | |||
| Alle Daten in SVN hinterlegen | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk SVN] | |||
|- | |||
| 0410 | |||
| REQ10.3250 | |||
| Modellierung der System- und Softwarearchitektur | |||
| Geeignete Software für System- und Softwarearchitektur verwenden (zb. MS Visio) | |||
| [http://193.175.248.52/wiki/index.php/Legosortiermaschine_gesamte_Anlage#Software_Dokumentation Wiki Artikel] | |||
|- | |||
| 0420 | |||
| REQ10.3260 | |||
| Tools für Softwareentwicklung | |||
| Geeignete Werkzeuge für Softwareentwicklung | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/14_Software_Prozess/Tools%20f%C3%BCr%20die%20Softwareentwicklung.docx Dokument] | |||
|- | |||
| 0430 | |||
| REQ10.3270 | |||
| Nachhaltigkeit | |||
| Alle wichtigen Software-Stände werden gut dokumentiert, d. h. ausführlich kommentiert und per SVN versioniert | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/08_Kommentarpr%C3%BCfung/Protokoll%20Kommentarpr%C3%BCfung.docx Dokument] | |||
|- | |||
| 0431 | |||
| REQ10.3271 | |||
| Nachhaltigkeit | |||
| Softwarestände dokumentieren | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/14_Software_Prozess/Wichtige%20Softwarezwischenst%C3%A4nde/Zeitachse%20wichtige%20Softwarest%C3%A4nde.pdf Dokument] | |||
|- | |||
| 0432 | |||
| REQ10.3272 | |||
| Nachhaltigkeit | |||
| Software ausführlich kommentieren | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/08_Kommentarpr%C3%BCfung/Protokoll%20Kommentarpr%C3%BCfung.docx Dokument] | |||
|- | |||
| 0432.1 | |||
| REQ10.3272 | |||
| Nachhaltigkeit | |||
| SVN - Nachhaltigkeit | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/30_SVN/SVN%20Nachhaltigkeit%20Dokumentation.docx Dokument] | |||
|- | |||
| 0510 | |||
| REQ10.3290 | |||
| Integrationstests | |||
| Für die entwickelte Software bzw. die Steuer- und Regelungsalgorithmen muss ein Integrationstest durchgeführt werden. | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/22_Pruefprotokolle/Integrations_Tests Integrations_Tests] | |||
|- | |||
| 0500 | |||
| REQ10.3280 | |||
| Komponententests | |||
| Für die entwickelte Software bzw. die Steuer- und Regelungsalgorithmen müssen geeignete Komponententests durchgeführt und geeignet dokumentiert werden | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/22_Pruefprotokolle/Unit_Tests Unit_Tests] | |||
|- | |||
| 0070.2 | |||
| REQ10.2060 | |||
| Verarbeitungszeit | |||
| > 120 Legoteile in 10min | |||
|[http://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/02_Versuchsprotokolle/Protokoll%20Verarbeitungsrate.xlsx Protokoll Verarbeitungsrate] | |||
|- | |||
| 0320 | |||
| REQ10.3220 | |||
| Ablagestruktur für Versionsverwaltung | |||
| Geeignete Struktur für SVN definieren und einrichten | |||
| | |||
|- | |||
| 0330 | |||
| REQ10.3231 | |||
| Dokumentation | |||
| Projektergebnisse nachvollziehbar und nachbaubar darstellen für fachversierte Nutzer | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/%C3%9Cbersicht%20der%20Dokumentationen.xlsx Übersicht Dokumentationen] | |||
|- | |||
| 0520.1 | |||
| REQ10.3300 | |||
| Coding Guidelines | |||
| Code Reviews | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews MATLAB] [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/10_Arduino_Software/Code_Reviews Arduino] | |||
|- | |||
| 0520.3 | |||
| REQ10.3300 | |||
| Coding Guidelines | |||
| Leitfaden überarbeiten (Arduino-C, Matlab) | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Anforderungsmanagement/Programmierrichtlinien Programmierrichtlinien] | |||
|- | |||
| 0521 | |||
| REQ10.3300 | |||
| Coding Guidelines | |||
| Untersuchung und Überarbeitung des bisherigen Codes bezüglich Einhaltung der Coding Guidelines | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/28_Software_Analyse Analyse MATLAB] | |||
|- | |||
| 0530 | |||
| REQ10.3310 | |||
| Dokumentation von Software | |||
| Geeignete Software zur Dokumentation des Quellcodes (zb LaTeX oder Doxygen) | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/Doc MATLAB mit m2html] [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/10_Arduino_Software/PAP_Dokumentation_Codeablauf.pap Arduino mit PapDesigner] | |||
|- | |||
| 0531 | |||
| REQ10.3311 | |||
| Dokumentation von Software | |||
| Video zur Bedienung von m2html | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/m2html_Anleitung_Video.mp4 Videoanleitung] | |||
|} | |||
<br /> | |||
=Schnittstellen= | |||
Die Legosortiermaschiene ist in drei Arbeitsbereiche eingeteilt. Dies hat den Vorteil, dass aus dem gesamten Team kleine Gruppen gebildet werden können, welche für ihren Maschinenteil verantwortlich sind. Dadurch wird vermieden, dass Aufgaben doppelt oder gar nicht erledigt werden. Es bringt allerdings den Nachteil mit sich, dass es Schnittstellen zwischen den Gruppen gibt. Diese müssen genau definiert werden, damit eine reibungslose Zusammenarbeit gewährleistet ist. | Die Legosortiermaschiene ist in drei Arbeitsbereiche eingeteilt. Dies hat den Vorteil, dass aus dem gesamten Team kleine Gruppen gebildet werden können, welche für ihren Maschinenteil verantwortlich sind. Dadurch wird vermieden, dass Aufgaben doppelt oder gar nicht erledigt werden. Es bringt allerdings den Nachteil mit sich, dass es Schnittstellen zwischen den Gruppen gibt. Diese müssen genau definiert werden, damit eine reibungslose Zusammenarbeit gewährleistet ist. | ||
== | ==Separierung - Bildverarbeitung== | ||
Die Separierung vereinzelt die Legoteile, damit die Bildverarbeitung diese verarbeiten kann. Dafür sind folgende Vereinbarungen getroffen worden: | Die Separierung vereinzelt die Legoteile, damit die Bildverarbeitung diese verarbeiten kann. Dafür sind folgende Vereinbarungen getroffen worden: | ||
| Zeile 15: | Zeile 166: | ||
* Es darf immer nur ein Teil von der Separierung an die Bildverarbeitung übergeben werden | * Es darf immer nur ein Teil von der Separierung an die Bildverarbeitung übergeben werden | ||
* Das Förderband und der Eingang der Bildverarbeitungsbox liegen auf einer Höhe, damit kein Teil vom Förderband fällt. Damit alle Teile in die Box fallen, ist diese schräg angebracht. | * Das Förderband und der Eingang der Bildverarbeitungsbox liegen auf einer Höhe, damit kein Teil vom Förderband fällt. Damit alle Teile in die Box fallen, ist diese schräg angebracht. | ||
* Die Anlage wird über einen Schaltschrank gesteuert. Dort werden die Komponenten der Separierung und der Bildverarbeitung gesteuert. | * Die Anlage wird über einen Schaltschrank gesteuert. Dort werden die Komponenten der Separierung und der Bildverarbeitung gesteuert. | ||
=== Software === | === Software === | ||
Beide Anlagenteile können nicht gleichzeitig durch zwei getrennt Programme gesteuert werden. Deshalb muss eine Hauptfunktion die Laufzeiten steuern. Nötige Vereinbarungen: | |||
* Sobald ein Teil in der Bildbox erkannt wird, bleibt die Separierung stehen | |||
* Kalibrierungen der Kameras wird in der Hauptfunktion durchgeführt | |||
* Die Teilprogramme dürfen keine Dauerschleifen haben | |||
* Die graphische Ausgabe für beide Funktionen ist in einer Figur | |||
== | ==Bildverarbeitung - Sortierung== | ||
Das Teil aus der Bildverarbeitung muss in die Sortierung gelangen, damit es richtig einsortiert wird. Dafür sind folgende Vereinbarungen getroffen worden: | Das Teil aus der Bildverarbeitung muss in die Sortierung gelangen, damit es richtig einsortiert wird. Dafür sind folgende Vereinbarungen getroffen worden: | ||
| Zeile 35: | Zeile 184: | ||
* Die Bildverarbeitung hat den Ausgang zur Seite | * Die Bildverarbeitung hat den Ausgang zur Seite | ||
* Das Teil wird mit einer Luftdüse herausgeschossen | * Das Teil wird mit einer Luftdüse herausgeschossen | ||
* Die Anlage wird über einen Schaltschrank gesteuert | * Die Anlage wird über einen Schaltschrank gesteuert. | ||
=== Software === | === Software === | ||
* Hat die Bildverarbeitung ein Teil erkannt, so steuert | * Hat die Bildverarbeitung ein Teil erkannt, so wird die Fachnummer an den Mikrocontroler gesendet. Dazu fragt die Bildverarbeitung die Fachnummer aus der Datenbank ab | ||
* Der Mikrocontroler steuert dann die die Klappen der Sortierung an | |||
<ref name="Autor: Busemann"> Autor Nils Busemann</ref> | <ref name="Autor: Busemann"> Autor Nils Busemann</ref> | ||
= ''' | =Neuverdrahtung des Schaltschranks= | ||
Nach der Übernahme des Projekts wurden folgende Mängel bei der Verdrahtung im Schaltschrank festgestellt: | |||
* Fehlen von Aderendhülsen auf flexiblen Leitungen | |||
* Aderendhülsen auf starren Leitungen | |||
* Signalleitungen mit starren Leitungen (Leitungsbruch bei geringem Bewegen dieser Leitungen) | |||
* Leitungen wurden vor dem Anschluss nicht auf Länge gebracht und lagen aufgerollt hinter dem Schaltschrank | |||
* Fehlende Beschriftung von Bauteilen, Leitungen und Adern | |||
* Dokumentation und Verdrahtung stimmen nicht überein | |||
Aufgrund dieser Mängel wurde entschieden, den Schaltschrank komplett neu zu verdrahten und dabei eine aktuelle Dokumentation zu erstellen. | |||
Die nachfolgenden Bilder zeigen einen Vorher/Nachher-Vergleich der Verdrahtung im Schaltschrank. | |||
<gallery widths="600" heights="600"> | |||
Datei:SchaltschrankVorher.jpg|Schaltschrank vor der Neuverdrahtung | |||
Datei:SchaltschrankNachher.jpg|Schaltschrank nach der Neuverdrahtung | |||
</gallery> | |||
Die aktuelle Verdrahtung ist durch einen [http://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/12_Schaltplaene_und_Layouts/03_Layout_Schaltplatine_inkl_Pneumatik/Verschaltung%20im%20Schaltkasten.xlsx Klemmenbelegungsplan] dokumentiert. | |||
<ref name="Autor: Bartnick"> Autor Madlen Bartnick</ref> | |||
=Richtlinien zur Codegestaltung= | |||
== Übersicht über die Richtlinien == | |||
Die Softwarekomponenten der Legoteil-Zählmaschine wurden in MATLAB und Arduino C implementiert. Um den Entwicklungsprozess zu vereinfachen mussten zunächst formalen Guidelines überarbeitet werden. | |||
Diese legen die formelle und syntaktische Gestaltung des im Rahmen des Praktikums erzeugten Codes fest. | |||
Insbesondere Liegt der Fokus hier auf: | |||
* Gestaltung von Headern | |||
* Benennung von Funktionen und Variablen | |||
* Umfang von Kommentaren | |||
Die Guidelines beziehen sich in erster Linie auf Code in C/C++ und Matlab, können jedoch auch leicht auf andere Sprachen übertragen werden. Sie wurden im Verlaufe des Semesters mehrfach überarbeitet und angepasst. Dies Erfolgte zuletzt in Zusammenarbeit mit Stephan Marks aus der Gruppe des [[Praktikum_SDE | Autonomen Fahrzeuges]]. Die [https://svn.hshl.de/usvn/project/MTR_SDE_Praktikum_2015/show/trunk/Anforderungsmanagement/Programmierrichtlinien entsprechenden Dokumente] liegen im SVN oder sind [[:Datei:Programmierrichtlinien_MTR.pdf | hier]] im Wiki zu finden und werden auch im weiteren Praktikumsverlauf falls nötig noch erweitert und verbessert werden. | |||
Konkret wurden hierbei folgende Änderungen vorgenommen: | |||
* Die C Richtlinien wurden auf MATLAB erweitert | |||
* Variablenbenennung soll auf Deutsch erfolgen | |||
* Es wurden Anforderungen an Kommentare hinzugefügt, laut denen allein anhand dieser der Programmablauf klar werden muss | |||
* Das Header Format wurde wie Folgt spezifiziert: | |||
{| class="wikitable" | |||
|- | |||
! Sprache | |||
! Modul | |||
! Funktion | |||
|- | |||
| C/C++ | |||
| <syntaxhighlight lang="c"> | |||
/************************************************************\ | |||
* | |||
* Modul : ModulName.c | |||
* | |||
* Datum : 04. Oktober 2013 | |||
* | |||
* Beschreibung : Zweck dieses Moduls | |||
* | |||
* Implementierung : Visual Studio 2012 Professional | |||
* | |||
* Autor : Mustermann, Max | |||
* | |||
* Bemerkung : Demo für den ersten Meilenstein | |||
* | |||
* Letzte Änderung : 04. Mai 2018 | |||
* | |||
\************************************************************/ | |||
</syntaxhighlight> | |||
| <syntaxhighlight lang="c"> | |||
/***********************************************************\ | |||
* | |||
* Funktion : MD_FunktionsName | |||
* | |||
* Datum : 04. Oktober 2013 | |||
* | |||
* Beschreibung : Zweck dieser Funktion | |||
* | |||
* Implementierung : Visual Studio 2012 Professional | |||
* | |||
* Autor : Mustermann, Max | |||
* | |||
* Bemerkung : Code-Review noch ausstehend | |||
* | |||
* Letzte Änderung : 04. Mai 2018 | |||
* | |||
* Übergebeparameter : | |||
* Typ Name Beschreibung | |||
* ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ | |||
* int n Anzahl Elemente des Arrays | |||
* double[] a Array mit double-Werten | |||
* | |||
* Rückgabeparameter : | |||
* Typ Beschreibung | |||
* ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~ | |||
* int Rückgabe eines Fehlercodes | |||
* | |||
\***********************************************************/ | |||
</syntaxhighlight> | |||
|- | |||
| MATLAB | |||
| <syntaxhighlight lang="matlab"> | |||
% ***********************************************************\ | |||
% | |||
% Modul : ModulName.m | |||
% | |||
% Datum : 04. Oktober 2013 | |||
% | |||
% Implementierung : MATLAB R2013a | |||
% | |||
% Toolbox : Example Toolbox | |||
% | |||
% Autor : Mustermann, Max | |||
% | |||
% Bemerkung : Code-Review noch ausstehend | |||
% | |||
% Letzte Änderung : 04. Mai 2018 | |||
% | |||
%************************************************************/ | |||
</syntaxhighlight> | |||
| <syntaxhighlight lang="matlab"> | |||
%************************************************************\ | |||
% | |||
% Funktion : Funktion.m | |||
% | |||
% Datum : 14. Mai 2018 | |||
% | |||
% Implementierung : MATLAB R2017a | |||
% | |||
% Toolbox : - | |||
% | |||
% Autor : Marks, Stephan | |||
% | |||
% Bemerkung : Beispiel eines Funktions-Headers | |||
% | |||
% Letzte Änderung : 04. Mai 2018 | |||
% | |||
% ***********************************************************/ | |||
</syntaxhighlight> | |||
|} | |||
*Im Falle des MATLAB Headers soll nach Möglichkeit zudem eine via <code> help Funktionsname </code> aufrufbare Hilfe eingebaut werden. Bei MATLAB wird hierfür stets der erste zusammenhängende Kommentar verwendet, daher sollte sich vor dem eigentlichen Header ein Block folgender Form befinden: | |||
<syntaxhighlight lang="matlab"> | |||
function result = Math_Add_A2B(a, b) | |||
% MATH_ADD_A2B addiert zwei Zahlen | |||
% | |||
% Syntax: | |||
% ergebnis = MATH_ADD_A2B(a, b) | |||
% | |||
% Beschreibung: | |||
% Es werden die zwei Zahlen 'a' und 'b' | |||
% beliebigen Datentyps addiert. | |||
% result = a + b | |||
% | |||
% Eingangswerte: | |||
% a: erster Summand | |||
% b: zweiter Summand | |||
% | |||
% Rückgabewerte: | |||
% result: Ergebnis der Addition von 'a' und 'b' | |||
% | |||
% Beispiel: | |||
% ergebnis = MATH_ADD_A2B(7, 12.583) | |||
</syntaxhighlight> | |||
Nach der ersten Überarbeitung der Guidelines wurde dann der gesamte bisherige Matlab Code bezüglich der Konformität überprüft und entsprechend überarbeitet. Dabei wurden die Benennungen und Formatierungen in Absprache mit Professor Göbel angepasst, um einen aufgeräumten und einheitlichen Ausgangszustand zu erzeugen, auf dem im Folgesemester weiter aufgebaut werden kann. Dazu wurde jede Datei des Programms analysiert und auf Header, Kommentare, Variablen und Funktionsbenennung untersucht und die Ergebnisse in einer Tabelle festgehalten. Zudem wurde überprüft, ob die einzelnen Funktionen im aktuellsten Programm überhaupt noch Verwendung fanden. Alle nicht verwendeten Programmteile wurden anschließend entfernt. | |||
Ein Ausschnitt der erstellten Tabelle ist im Folgenden dargestellt: | |||
[[Datei:Codeedit.jpg | 1000px | thumb | zentriert| Abbildung 1: Ausschnitt aus der Analysetabelle]] | |||
Eine komplette [https://svn.hshl.de/usvn/project/MTR_SDE_Praktikum_2015/show/trunk/Dokumentation/28_Software_Analyse/Analyse_MATLAB.xlsx Liste mit allen überarbeiteten und gelöschten Dateien] sowie [https://svn.hshl.de/usvn/project/MTR_SDE_Praktikum_2015/show/trunk/Dokumentation/28_Software_Analyse/Variablenumbenennung.xlsx Informationen zu den Umbenennungen] sind im SVN zu finden. Eine erneute Überarbeitung aller Header aufgrund wiederholter Anpassungen steht noch aus. Die tatsächlich bearbeiteten Dateien wurden im Verlaufe des Projektes entsprechend angepasst. | |||
== Code Reviews == | |||
[[Datei:Codereview_Beispiel_Legoteilmaschine.png | 700px | thumb | rechts | Abbildung 2: Beispiel eines Code-Reviews mit neuem Template]] | |||
Gegen Ende des Projektzeitraums wurden für alle nennenswert veränderten Dateien des Projektes Code-Reviews durchgeführt. Dabei wurde in Anlehnung an ein vorhandenes Hella-Template ein neues, für den Umfang des Projektes besser geeignetes, neues Template erstellt. In diesem befindet sich neben den allgemeinen Projektdaten und dem Ergebnis der Analyse eine Checkliste, mit welcher Schritt für Schritt die einzelnen Dateien und Funktionen untersucht werden können. | |||
= | Die Code Reviews wurden für folgende Quelldateien erstellt: | ||
{| class="wikitable" | |||
|- | |||
!Dateiname | |||
!Link | |||
|- | |||
| Anlernen.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Anlernen.docx SVN Link] | |||
|- | |||
| AutomatischesZaehlen.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_AutomatischesZaehlen.docx SVN Link] | |||
|- | |||
| BaukastenBearbeiten.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_BaukastenBearbeiten.docx SVN Link] | |||
|- | |||
| Bildverarbeitung_Teach_In.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Bildverarbeitung_Teach_In.docx SVN Link] | |||
|- | |||
| Datenbankabgleich.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Datenbankabgleich.docx SVN Link] | |||
|- | |||
| ExcelOeffnen.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_ExcelOeffnen.docx SVN Link] | |||
|- | |||
| FarberkennungMaske.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_FarberkennungMaske.docx SVN Link] | |||
|- | |||
| Fehlteilliste.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Fehlteilliste.docx SVN Link] | |||
|- | |||
| Inventurliste.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Inventurliste.docx SVN Link] | |||
|- | |||
| Merkmalsberechnung.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Merkmalsberechnung.docx SVN Link] | |||
|- | |||
| Separierung.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_Separierung.docx SVN Link] | |||
|- | |||
| StartSortiermaschine.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_StartSortiermaschine.docx SVN Link] | |||
|- | |||
| TeachIn2.m | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/07_Code_Reviews/Code_Review_TeachIn2.docx SVN Link] | |||
|- | |||
| Serielle_Steuerung.ino | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/10_Arduino_Software/Code_Reviews/Code_Review_SerielleSteuerung.docx SVN Link] | |||
|} | |||
<ref name="Autor: Wolf"> Autor Jerome Wolf</ref> | |||
=SVN= | |||
Die Ordnerstruktur im SVN wurde größtenteils von den Vorsemestern übernommen. In dem Bereich Dokumentation wurden einige Teilbeeiche hinzugefügt um neu entstandene Dokumente sinnvoll abzuspeichern. | |||
Die Nachhaltigkeit des SVN Ordners wurde durch verschiedene Maßnamen verbessert: | |||
*Entfernen ungenutzter Dateien | |||
**Im Ordner SRC wurden alte, ungenutzte Dateien entfernt | |||
*Löschen temporärer Dateien wie Matlab .asv Dateien oder ~$ Dateien von Office Programmen | |||
*Ignorierliste erweitert | |||
**.asv Dateien | |||
**Inventurliste.xls | |||
*Umbenennungen | |||
**FARBERKENNUNG_V2 --> Farberkennung | |||
**createBinary_V3 --> createBinary | |||
* Manuelle Versionierung behoben | |||
* Doppelte Dateien gelöscht | |||
<ref name="Autor: Müller"> Autor Torben Müller</ref> | |||
=Verlauf der Verarbeitungsrate= | |||
Die Verarbeitungsrate der Maschine ist ein gutes Maß, um den Fortschritt des Projekts sichtbar zu machen oder den Erfolg einzelner Maßnahmen zu überprüfen. Dazu wird nach jeder großen Änderung und zu jedem Meilenstein ein Sortierprozess gestartet und für eine gewisse Zeit beobachtet. Anschließend wird aus der Anzahl der erfolgreich sortierten Teile und der dabei benötigten Zeit die Verarbeitungsrate in Teile pro 10 Minuten ermittelt. Zusätzlich wird über die Differenz der zugeführten und im ersten Durchlauf richtig sortierten Teile die Sortierung in Prozent berechnet. Dabei ist zu beachten, dass seit dem 11.01.2019 zum Zweck der Vereinzelung Teile aus dem Prozess genommen werden, bevor sie die Bildverarbeitung erreichen. Die Sortierung in Prozent ist daher kein Gütekriterium der Bildverarbeitung. | |||
Die folgende Tabelle zeigt eine Auswahl von ermittelten Verarbeitungsraten, um den Verlauf des Projekts zu verdeutlichen. | |||
{| class="wikitable" | |||
|- | |||
!Datum | |||
!Anzahl zugeführte Teile | |||
!Anzahl erfolgreich sortierte Teile | |||
!Dauer | |||
!Verarbeitungsrate Teile/10min | |||
!Sortierung in % | |||
!Kommentar | |||
|- | |||
| 23.04.18 | |||
| 50 | |||
| 13 | |||
| 10 Minuten | |||
| 13,0 | |||
| 26 | |||
| Ausgangssituation nach Übernahme des Projekts | |||
|- | |||
| 25.06.18 | |||
| 81 | |||
| 54 | |||
| 9,5 Minuten | |||
| 56,84 | |||
| 66,67 | |||
| Ergebnis des SS18 | |||
|- | |||
| 11.01.19 | |||
| 326 | |||
| 270 | |||
| 23,3 Minuten | |||
| 115,88 | |||
| 82,82209 | |||
| Umbau der Separierung und Integration der Sortiereinheit | |||
|- | |||
| 17.01.19 | |||
| 175 | |||
|122 | |||
| 10 Minuten | |||
| 122,00 | |||
| 69,71429 | |||
| Programmtechnische Optimierung | |||
|- | |||
|} | |||
Wie der Tabelle zu entnehmen ist, konnte die Verarbeitungsrate seit Übernahme des Projekts signifikant gesteigert werden. Der im Pflichtenheft vereinbarte Mindestwert der Verarbeitungsrate von 120 Teilen in 10 Minuten ist zu Meilenstein 4 erreicht worden. Das Projekt kann also als erfolgreich bearbeitet angesehen werden. | |||
<br /> | <br /> | ||
< | <ref name="Autor: Bartnick"> Autor Madlen Bartnick</ref> | ||
< | |||
< | =Inbetriebnahmeprotokoll= | ||
<br | |||
In einem Inbetriebnahmeprotokoll wurde die Legosortiermaschine im Juni 2018 in Betrieb genommen. | |||
Folgende Requirements wurden in diesem Protokoll bearbeitet und als Ergebnis in SVN festgehalten: | |||
{| class="wikitable" | |||
|- | |||
!Spezifikations-ID | |||
!Anforderungs-ID | |||
!Anforderungstitel | |||
!Beschreibung der Spezifikation | |||
|- | |||
| 0020 | |||
| REQ10.2010 | |||
| Antriebe | |||
| Elektrischer Antrieb muss vorhanden sein | |||
|- | |||
| 0030 | |||
| REQ10.2020 | |||
| Energieversorgung | |||
| Per 230V AC Schukostecker | |||
|- | |||
| 0040 | |||
| REQ10.2030 | |||
| Abmessung | |||
| 2,5m x 1m x 1,5m Grundplattenmontage | |||
|- | |||
| 0056 | |||
| REQ10.2040 | |||
| Sicherheit/ Gefährdungsbeurteilung | |||
| Drucken und Anbringen von Warnhinweisen | |||
|} | |||
Das Inbetriebnahmeprotokoll ist unter folgendem Link zu finden: | |||
[https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/22_Pruefprotokolle/Inbetriebnahmeprotokoll.docx Inbetriebnahmeprotokoll] | |||
Der Systemtest der elektrischen Antriebe wurde zudem in einem Protokoll festgehalten und ist unter folgendem Link zu finden: | |||
[https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/25_Systemtests/Systemtest_elektrischer_Antrieb.docx Systemtest elektrische Antriebe] | |||
<ref name="Autor: Eidhoff"> Autor Marc Eidhoff</ref> | |||
<ref name="Autor: Brandt"> Autor Tobias Brandt</ref> | |||
=Gefährdungsbeurteilung= | |||
Eine Gefährdungsbeurteilung wurde im Juni 2018 erstellt. | |||
Die Gefährdungsbeurteilung wurde in tabellarischer Form angelegt und listet mögliche Gefahren der Legosortiermaschine auf. | |||
Von der Grundausstattung über elektrische und mechanische Gefährdungen, wurden auch Gefahrstoffe und Brandgefährdungen kontrolliert. | |||
Mögliche Gefahren wurden dabei in folgende Risikostufen eingeteilt: | |||
* Kein Risiko | |||
* Geringes Risiko | |||
* Großes Risiko | |||
Anhand der Risikostufe werden desweiteren Lösungsmaßnahmen sowie Termine zur Fehlerbehebung festgelegt. | |||
Es wurden die folgenden drei Risiken erkannt: | |||
1.) Eine Betriebsanweisung ist erstellt worden? | |||
Das Risiko wurde als gering eingeschätzt und es wurde die Pflicht aufgenommen, eine Betriebsanweisung zum Meilenstein 4 zu erstellen. | |||
2.) Bewegte Transportmittel, bewegte Arbeitsmittel | |||
Für das Förderband gibt es momentan lediglich einen Warnhinweis und keinen materiellen Einklemmschutz. Dieses Risiko wurde als gering eingeschätzt und zum Meilenstein 3 wird ein Schutz angebracht werden. | |||
3.) Unkontrollierte bewegte Teile | |||
Nach der Bildverarbeitung werden die Legoteile "ausgeschossen". Dieses Risiko wurde ebenfalls als gering eingestuft. Als Maßnahme gilt der Zusammenbau der Sortiereinheit, welcher anschließend vor der Bildverarbeitung positioniert wird. | |||
Die gesamte Gefährdungsbeurteilung wurde in SVN abgelegt und ist unter folgendem Link zu finden: [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/13_Gefaehrdungsbeurteilung/SS18/Gefährdungsbeurteilung.docx Gefährdungsbeurteilung] | |||
<ref name="Autor: Eidhoff"> Autor Marc Eidhoff</ref> | |||
<ref name="Autor: Brandt"> Autor Tobias Brandt</ref> | |||
=Software Dokumentation= | |||
== Allgemeine Informationen == | |||
<br> | |||
[[Datei:PAP-Beispiel.JPG|250px|thumb|rechts|Abbildung 3: Beispiel PAP]] | |||
{| class="wikitable" | |||
|- | |||
!Spezifikations-ID | |||
!Anforderungs-ID | |||
!Anforderungstitel | |||
!Beschreibung der Spezifikation | |||
|- | |||
| 410 | |||
| REQ10.2320 | |||
| Modellierung der System- und Softwarearchitektur | |||
| Geeignete Software für System- und Softwarearchitektur verwenden (zb. MS Visio) | |||
|} | |||
Eine Softwarearchitektur beschreibt die grundlegenden Komponenten und deren Zusammenspiel innerhalb eines Softwaresystems. | |||
Eine Systemarchitektur wird nach dem V-Modell XT im Rahmen des Systementwurfs erstellt und umfasst die Dekomposition des Systems, die Schnittstellenübersicht und den übergreifenden Datenkatalog (Daten, die Systeme und Systemelemente austauschen). | |||
Zu Beginn der Systemarchitekturarbeiten werden, durch Analyse der Gesamtsystemspezifikation und weiterer vorhandener Informationen, Architekturtreiber identifiziert und Bewertungskriterien festgelegt. Funktionale und nicht-funktionale Anforderungen beeinflussen den Entwurf der Systemarchitektur, die in Architektursichten dokumentiert wird. | |||
Für die System- und Softwarearchitektur müssen Programme verwendet werden die kostenfrei sind oder durch die Hochschule zur Verfügung gestellt werden. | |||
Beipielhaft können folgende Programme verwendet werden: | |||
*PapDesigner | |||
*MS Visio | |||
*Clickcharts | |||
*Dia | |||
*XMind | |||
*FreeeMind | |||
Für den Ablauf der Legosortiermaschine wurde mit der Software PAP-Designer ein Ablaufplan erstellt. In der neben stehenden Abbildung 3 ist ein Auszug zu sehen. | |||
Das Dokument ist unter folgendem Link abrufbar: | |||
[https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/10_Arduino_Software/PAP_Dokumentation_Codeablauf.pap Ablaufplan] | |||
Dateien sollten nicht als PDF oder Bilder gespeichert werden um nachfolgenden Gruppen die Weiterbearbeitung und Ergänzung zu ermöglichen. | |||
== MATLAB Dokumentation == | |||
: | {| class="wikitable" | ||
|- | |||
!Spezifikations-ID | |||
!Anforderungs-ID | |||
!Anforderungstitel | |||
!Beschreibung der Spezifikation | |||
!Arbeitsergebnis | |||
|- | |||
| 0530 | |||
| REQ10.3310 | |||
| Dokumentation von Software | |||
| Geeignete Software zur Dokumentation des Quellcodes (zb LaTeX oder Doxygen) | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/Doc MATLAB mit m2html] | |||
|- | |||
| 0531 | |||
| REQ10.3311 | |||
| Dokumentation von Software | |||
| Video zur Bedienung von m2html | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/m2html_Anleitung_Video.mp4 Videoanleitung] | |||
|} | |||
[[Datei:M2html_Index.png | thumb | left | Abbildung 4: m2html Übersicht]] | |||
[[Datei:M2html_Funktionsbeispiel.png | right | thumb | Abbildung 5: m2html Funktionsbeispiel]] | |||
Die MATLAB Dokumentation wurde mit [https://www.artefact.tk/software/matlab/m2html/ m2html] erstellt. Es handelt sich dabei um ein doxygen-ähnliches Werkzeug, welches die Quelldateien eines Projektes automatisch analysiert und eine im Webbrowser benutzbare Dokumentation erstellt. Hierbei werden für jede Quelldatei Funktionsname, Kopf, Eingabe- und Ausgabeparameter, sowie Zugriffe von und auf andere Funktionen im Projekt untersucht und übersichtlich dargestellt. Zu den Funktionszugriffen wird optional auch ein Graph erstellt, wie in ABB gezeigt. Da das Tool für eine sehr alte MATLAB-Version geschrieben wurde, sind einige Funktionen, unter anderem die Benutzeroberfläche zur einfachen Bedienung nicht mehr vollständig benutzbar. Zudem musste der Algorithmus zur Code-Analyse an einigen Stellen leicht abgeändert werden, um mit den neu erstellten [[#Richtlinien zur Codegestaltung | Richtlinien zur Codegestaltung]] zu funktionieren. Weitere Änderungen können falls nötig in [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/m2html/private/mfileparse.m mfileparse.m] vorgenommen werden. Die [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/m2html_Anleitung.txt Anleitung] sowie ein kurzes [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/m2html_Anleitung_Video.mp4 Bedienungs- und Demovideo] sind im SVN zu finden. | |||
Nach der Erstellung der Dokumentation kann diese mit dem öffnen der [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/Doc/index.html index.html] im [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/06_MATLAB/06_Dokumentation_mit_m2html/Doc Dokumentationsordner] eingesehen werden. Die Übersicht sowie eine beispielhafte Funktionsinformation sind im folgenden in Abbildung 4 bzw. 5 dargestellt. | |||
: | |||
== Arduino Dokumentation == | |||
[[Datei:Serielle_Steuerung_PAP.jpg | thumb | right | Abbildung 6: PAP der Seriellen Steuerung]] | |||
: | |||
{| class="wikitable" | |||
|- | |||
!Spezifikations-ID | |||
!Anforderungs-ID | |||
!Anforderungstitel | |||
!Beschreibung der Spezifikation | |||
!Arbeitsergebnis | |||
|- | |||
| 0530 | |||
| REQ10.3310 | |||
| Dokumentation von Software | |||
| Geeignete Software zur Dokumentation des Quellcodes (zb LaTeX oder Doxygen) | |||
| [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/10_Arduino_Software/PAP_Dokumentation_Codeablauf.pap Arduino mit PapDesigner] | |||
|} | |||
Die Arduino Dokumentation beschränkt sich auf eine einzelne Datei, welche die via USB empfangenen seriellen Daten auswertet und die jeweiligen Elemente der Maschine entsprechend ansteuert. Da sich somit keine komplexen Zusammenhänge zwischen verschiedenen Dateien im Programm ergeben, wurde für den Code mithilfe von PapDesigner ein genauer Ablaufplan in PapDesigner erstellt. Das Ergebnis ist in Abbildung 6 zu sehen. | |||
<ref name="Autor: Wolf"> Autor Jerome Wolf</ref> | |||
<ref name="Autor: Eidhoff"> Autor Marc Eidhoff</ref> | |||
<ref name="Autor: Brandt"> Autor Tobias Brandt</ref> | |||
=Dokumentation= | |||
Die Ergebnisse des Projektes wurden, wie in Spezifikation 0330 gefordert, nachvollziehbar und nachbaubar dokumentiert. Die gesamten Dateien und Unterlagen zur Dokumentation sind strukturiert in [https://svn.hshl.de/usvn/project/MTR_SDE_Praktikum_2015/browser SVN] gesichert und versioniert. Abbildung 7 zeigt eine [https://svn.hshl.de/svn/MTR_SDE_Praktikum_2015/trunk/Dokumentation/%C3%9Cbersicht%20der%20Dokumentationen.xlsx Übersicht der Dokumentationen], die im WS18/19 anzufertigen waren. Mit Hilfe der dort dargestellten Tabelle wurde die Vollständigkeit sowie der Fortschritt der Dokumentation überprüft. | |||
<br/> | |||
<br/> | |||
[[Datei: Übersicht der Dokumentationen.jpg | 750px | thumb | zentriert| Abbildung 7: Übersicht der Dokumentationen]] | |||
<ref name="Autor: Bartnick"> Autor Madlen Bartnick</ref> | |||
=Zusammenfassung= | |||
Dieser Artikel beschreibt Punkte zur Hardware und Software, die auf die gesamte Anlage bezogen sind. Umgesetzte Punkte sind die folgenden: | |||
=Liste offener Punkte (LoP)= | |||
* Separate Absicherung der 5V und 24V Stromkreise (Benötigte Materialien bereits in BOM eingetragen, Bestellung war zum Jahresende nicht mehr möglich) | |||
* Provisorischen Vorwiderstand der Vibrationsförderrinne durch Potentiometer ersetzen (Benötigte Materialien bereits in BOM eingetragen, Bestellung war zum Jahresende nicht mehr möglich) | |||
= Autoren = | = Autoren = | ||
<references /> | <references /> | ||
'' | |||
Dies ist ein Unterartikel von der [http://193.175.248.52/wiki/index.php/Legoteil_Z%C3%A4hlmaschine Legoteil_Zählmaschine], welcher die Zusammenführung der einzelnen Teile zu einer Einheit beschrieben.'' | |||
Aktuelle Version vom 30. Januar 2019, 12:46 Uhr
Dies ist ein Unterartikel von der Legoteil Zählmaschine, wo Aufgaben bezogen auf die ganze Anlage beschrieben werden.
Anforderungen
| Spezifikations-ID | Anforderungs-ID | Anforderungstitel | Beschreibung der Spezifikation | Arbeitsergebnis |
|---|---|---|---|---|
| 0057 | REQ10.2041 | Sicherheit/ Gefährdungsbeurteilung | Schaltschrank verdrahten | Inbetriebnahmeprotokoll |
| 0010 | REQ10.2000 | Eigenständige Funktionsweise der Sortiermaschine | Funktionsfähig ohne Verbindung zu einem anderen System und ohne menschliche Eingriffe | Inbetriebnahmeprotokoll |
| 0052 | REQ10.2040 | Sicherheit / Gefährdungsbeurteilung | Mechanische Sicherheit (Einklemmschutz) | Inbetriebnahmeprotokoll |
| 0053 | REQ10.2040 | Sicherheit/ Gefährdungsbeurteilung | Erstellen einer Gebrauchsanleitung im Wiki | Wiki-Artikel |
| 0054 | REQ10.2040 | Sicherheit / Gefährdungsbeurteilung | Erstellen einer Schritt-für-Schritt Anleitung im Wiki | Wiki-Artikel |
| 0300 | REQ10.3200 | Projektplanung | MS Project verwenden | Dokument |
| 0310 | REQ10.3210 | Versionsverwaltung | Alle Daten in SVN hinterlegen | SVN |
| 0410 | REQ10.3250 | Modellierung der System- und Softwarearchitektur | Geeignete Software für System- und Softwarearchitektur verwenden (zb. MS Visio) | Wiki Artikel |
| 0420 | REQ10.3260 | Tools für Softwareentwicklung | Geeignete Werkzeuge für Softwareentwicklung | Dokument |
| 0430 | REQ10.3270 | Nachhaltigkeit | Alle wichtigen Software-Stände werden gut dokumentiert, d. h. ausführlich kommentiert und per SVN versioniert | Dokument |
| 0431 | REQ10.3271 | Nachhaltigkeit | Softwarestände dokumentieren | Dokument |
| 0432 | REQ10.3272 | Nachhaltigkeit | Software ausführlich kommentieren | Dokument |
| 0432.1 | REQ10.3272 | Nachhaltigkeit | SVN - Nachhaltigkeit | Dokument |
| 0510 | REQ10.3290 | Integrationstests | Für die entwickelte Software bzw. die Steuer- und Regelungsalgorithmen muss ein Integrationstest durchgeführt werden. | Integrations_Tests |
| 0500 | REQ10.3280 | Komponententests | Für die entwickelte Software bzw. die Steuer- und Regelungsalgorithmen müssen geeignete Komponententests durchgeführt und geeignet dokumentiert werden | Unit_Tests |
| 0070.2 | REQ10.2060 | Verarbeitungszeit | > 120 Legoteile in 10min | Protokoll Verarbeitungsrate |
| 0320 | REQ10.3220 | Ablagestruktur für Versionsverwaltung | Geeignete Struktur für SVN definieren und einrichten | |
| 0330 | REQ10.3231 | Dokumentation | Projektergebnisse nachvollziehbar und nachbaubar darstellen für fachversierte Nutzer | Übersicht Dokumentationen |
| 0520.1 | REQ10.3300 | Coding Guidelines | Code Reviews | MATLAB Arduino |
| 0520.3 | REQ10.3300 | Coding Guidelines | Leitfaden überarbeiten (Arduino-C, Matlab) | Programmierrichtlinien |
| 0521 | REQ10.3300 | Coding Guidelines | Untersuchung und Überarbeitung des bisherigen Codes bezüglich Einhaltung der Coding Guidelines | Analyse MATLAB |
| 0530 | REQ10.3310 | Dokumentation von Software | Geeignete Software zur Dokumentation des Quellcodes (zb LaTeX oder Doxygen) | MATLAB mit m2html Arduino mit PapDesigner |
| 0531 | REQ10.3311 | Dokumentation von Software | Video zur Bedienung von m2html | Videoanleitung |
Schnittstellen
Die Legosortiermaschiene ist in drei Arbeitsbereiche eingeteilt. Dies hat den Vorteil, dass aus dem gesamten Team kleine Gruppen gebildet werden können, welche für ihren Maschinenteil verantwortlich sind. Dadurch wird vermieden, dass Aufgaben doppelt oder gar nicht erledigt werden. Es bringt allerdings den Nachteil mit sich, dass es Schnittstellen zwischen den Gruppen gibt. Diese müssen genau definiert werden, damit eine reibungslose Zusammenarbeit gewährleistet ist.
Separierung - Bildverarbeitung
Die Separierung vereinzelt die Legoteile, damit die Bildverarbeitung diese verarbeiten kann. Dafür sind folgende Vereinbarungen getroffen worden:
Hardware
- Es darf immer nur ein Teil von der Separierung an die Bildverarbeitung übergeben werden
- Das Förderband und der Eingang der Bildverarbeitungsbox liegen auf einer Höhe, damit kein Teil vom Förderband fällt. Damit alle Teile in die Box fallen, ist diese schräg angebracht.
- Die Anlage wird über einen Schaltschrank gesteuert. Dort werden die Komponenten der Separierung und der Bildverarbeitung gesteuert.
Software
Beide Anlagenteile können nicht gleichzeitig durch zwei getrennt Programme gesteuert werden. Deshalb muss eine Hauptfunktion die Laufzeiten steuern. Nötige Vereinbarungen:
- Sobald ein Teil in der Bildbox erkannt wird, bleibt die Separierung stehen
- Kalibrierungen der Kameras wird in der Hauptfunktion durchgeführt
- Die Teilprogramme dürfen keine Dauerschleifen haben
- Die graphische Ausgabe für beide Funktionen ist in einer Figur
Bildverarbeitung - Sortierung
Das Teil aus der Bildverarbeitung muss in die Sortierung gelangen, damit es richtig einsortiert wird. Dafür sind folgende Vereinbarungen getroffen worden:
Hardware
- Die Bildverarbeitung hat den Ausgang zur Seite
- Das Teil wird mit einer Luftdüse herausgeschossen
- Die Anlage wird über einen Schaltschrank gesteuert.
Software
- Hat die Bildverarbeitung ein Teil erkannt, so wird die Fachnummer an den Mikrocontroler gesendet. Dazu fragt die Bildverarbeitung die Fachnummer aus der Datenbank ab
- Der Mikrocontroler steuert dann die die Klappen der Sortierung an
Neuverdrahtung des Schaltschranks
Nach der Übernahme des Projekts wurden folgende Mängel bei der Verdrahtung im Schaltschrank festgestellt:
- Fehlen von Aderendhülsen auf flexiblen Leitungen
- Aderendhülsen auf starren Leitungen
- Signalleitungen mit starren Leitungen (Leitungsbruch bei geringem Bewegen dieser Leitungen)
- Leitungen wurden vor dem Anschluss nicht auf Länge gebracht und lagen aufgerollt hinter dem Schaltschrank
- Fehlende Beschriftung von Bauteilen, Leitungen und Adern
- Dokumentation und Verdrahtung stimmen nicht überein
Aufgrund dieser Mängel wurde entschieden, den Schaltschrank komplett neu zu verdrahten und dabei eine aktuelle Dokumentation zu erstellen.
Die nachfolgenden Bilder zeigen einen Vorher/Nachher-Vergleich der Verdrahtung im Schaltschrank.
-
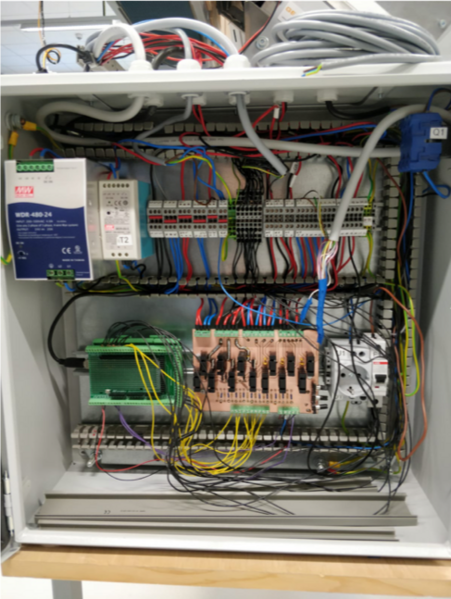 Schaltschrank vor der Neuverdrahtung
Schaltschrank vor der Neuverdrahtung -
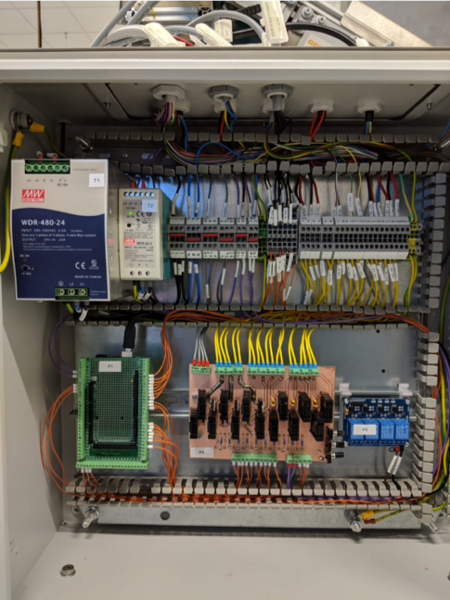 Schaltschrank nach der Neuverdrahtung
Schaltschrank nach der Neuverdrahtung


Die aktuelle Verdrahtung ist durch einen Klemmenbelegungsplan dokumentiert.
Richtlinien zur Codegestaltung
Übersicht über die Richtlinien
Die Softwarekomponenten der Legoteil-Zählmaschine wurden in MATLAB und Arduino C implementiert. Um den Entwicklungsprozess zu vereinfachen mussten zunächst formalen Guidelines überarbeitet werden. Diese legen die formelle und syntaktische Gestaltung des im Rahmen des Praktikums erzeugten Codes fest.
Insbesondere Liegt der Fokus hier auf:
- Gestaltung von Headern
- Benennung von Funktionen und Variablen
- Umfang von Kommentaren
Die Guidelines beziehen sich in erster Linie auf Code in C/C++ und Matlab, können jedoch auch leicht auf andere Sprachen übertragen werden. Sie wurden im Verlaufe des Semesters mehrfach überarbeitet und angepasst. Dies Erfolgte zuletzt in Zusammenarbeit mit Stephan Marks aus der Gruppe des Autonomen Fahrzeuges. Die entsprechenden Dokumente liegen im SVN oder sind hier im Wiki zu finden und werden auch im weiteren Praktikumsverlauf falls nötig noch erweitert und verbessert werden.
Konkret wurden hierbei folgende Änderungen vorgenommen:
- Die C Richtlinien wurden auf MATLAB erweitert
- Variablenbenennung soll auf Deutsch erfolgen
- Es wurden Anforderungen an Kommentare hinzugefügt, laut denen allein anhand dieser der Programmablauf klar werden muss
- Das Header Format wurde wie Folgt spezifiziert:
| Sprache | Modul | Funktion |
|---|---|---|
| C/C++ | /************************************************************\
*
* Modul : ModulName.c
*
* Datum : 04. Oktober 2013
*
* Beschreibung : Zweck dieses Moduls
*
* Implementierung : Visual Studio 2012 Professional
*
* Autor : Mustermann, Max
*
* Bemerkung : Demo für den ersten Meilenstein
*
* Letzte Änderung : 04. Mai 2018
*
\************************************************************/
|
/***********************************************************\
*
* Funktion : MD_FunktionsName
*
* Datum : 04. Oktober 2013
*
* Beschreibung : Zweck dieser Funktion
*
* Implementierung : Visual Studio 2012 Professional
*
* Autor : Mustermann, Max
*
* Bemerkung : Code-Review noch ausstehend
*
* Letzte Änderung : 04. Mai 2018
*
* Übergebeparameter :
* Typ Name Beschreibung
* ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
* int n Anzahl Elemente des Arrays
* double[] a Array mit double-Werten
*
* Rückgabeparameter :
* Typ Beschreibung
* ~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
* int Rückgabe eines Fehlercodes
*
\***********************************************************/
|
| MATLAB | % ***********************************************************\
%
% Modul : ModulName.m
%
% Datum : 04. Oktober 2013
%
% Implementierung : MATLAB R2013a
%
% Toolbox : Example Toolbox
%
% Autor : Mustermann, Max
%
% Bemerkung : Code-Review noch ausstehend
%
% Letzte Änderung : 04. Mai 2018
%
%************************************************************/
|
%************************************************************\
%
% Funktion : Funktion.m
%
% Datum : 14. Mai 2018
%
% Implementierung : MATLAB R2017a
%
% Toolbox : -
%
% Autor : Marks, Stephan
%
% Bemerkung : Beispiel eines Funktions-Headers
%
% Letzte Änderung : 04. Mai 2018
%
% ***********************************************************/
|
- Im Falle des MATLAB Headers soll nach Möglichkeit zudem eine via
help Funktionsnameaufrufbare Hilfe eingebaut werden. Bei MATLAB wird hierfür stets der erste zusammenhängende Kommentar verwendet, daher sollte sich vor dem eigentlichen Header ein Block folgender Form befinden:
function result = Math_Add_A2B(a, b)
% MATH_ADD_A2B addiert zwei Zahlen
%
% Syntax:
% ergebnis = MATH_ADD_A2B(a, b)
%
% Beschreibung:
% Es werden die zwei Zahlen 'a' und 'b'
% beliebigen Datentyps addiert.
% result = a + b
%
% Eingangswerte:
% a: erster Summand
% b: zweiter Summand
%
% Rückgabewerte:
% result: Ergebnis der Addition von 'a' und 'b'
%
% Beispiel:
% ergebnis = MATH_ADD_A2B(7, 12.583)
Nach der ersten Überarbeitung der Guidelines wurde dann der gesamte bisherige Matlab Code bezüglich der Konformität überprüft und entsprechend überarbeitet. Dabei wurden die Benennungen und Formatierungen in Absprache mit Professor Göbel angepasst, um einen aufgeräumten und einheitlichen Ausgangszustand zu erzeugen, auf dem im Folgesemester weiter aufgebaut werden kann. Dazu wurde jede Datei des Programms analysiert und auf Header, Kommentare, Variablen und Funktionsbenennung untersucht und die Ergebnisse in einer Tabelle festgehalten. Zudem wurde überprüft, ob die einzelnen Funktionen im aktuellsten Programm überhaupt noch Verwendung fanden. Alle nicht verwendeten Programmteile wurden anschließend entfernt.
Ein Ausschnitt der erstellten Tabelle ist im Folgenden dargestellt:

Eine komplette Liste mit allen überarbeiteten und gelöschten Dateien sowie Informationen zu den Umbenennungen sind im SVN zu finden. Eine erneute Überarbeitung aller Header aufgrund wiederholter Anpassungen steht noch aus. Die tatsächlich bearbeiteten Dateien wurden im Verlaufe des Projektes entsprechend angepasst.
Code Reviews

Gegen Ende des Projektzeitraums wurden für alle nennenswert veränderten Dateien des Projektes Code-Reviews durchgeführt. Dabei wurde in Anlehnung an ein vorhandenes Hella-Template ein neues, für den Umfang des Projektes besser geeignetes, neues Template erstellt. In diesem befindet sich neben den allgemeinen Projektdaten und dem Ergebnis der Analyse eine Checkliste, mit welcher Schritt für Schritt die einzelnen Dateien und Funktionen untersucht werden können.
Die Code Reviews wurden für folgende Quelldateien erstellt:
| Dateiname | Link |
|---|---|
| Anlernen.m | SVN Link |
| AutomatischesZaehlen.m | SVN Link |
| BaukastenBearbeiten.m | SVN Link |
| Bildverarbeitung_Teach_In.m | SVN Link |
| Datenbankabgleich.m | SVN Link |
| ExcelOeffnen.m | SVN Link |
| FarberkennungMaske.m | SVN Link |
| Fehlteilliste.m | SVN Link |
| Inventurliste.m | SVN Link |
| Merkmalsberechnung.m | SVN Link |
| Separierung.m | SVN Link |
| StartSortiermaschine.m | SVN Link |
| TeachIn2.m | SVN Link |
| Serielle_Steuerung.ino | SVN Link |
SVN
Die Ordnerstruktur im SVN wurde größtenteils von den Vorsemestern übernommen. In dem Bereich Dokumentation wurden einige Teilbeeiche hinzugefügt um neu entstandene Dokumente sinnvoll abzuspeichern.
Die Nachhaltigkeit des SVN Ordners wurde durch verschiedene Maßnamen verbessert:
- Entfernen ungenutzter Dateien
- Im Ordner SRC wurden alte, ungenutzte Dateien entfernt
- Löschen temporärer Dateien wie Matlab .asv Dateien oder ~$ Dateien von Office Programmen
- Ignorierliste erweitert
- .asv Dateien
- Inventurliste.xls
- Umbenennungen
- FARBERKENNUNG_V2 --> Farberkennung
- createBinary_V3 --> createBinary
- Manuelle Versionierung behoben
- Doppelte Dateien gelöscht
Verlauf der Verarbeitungsrate
Die Verarbeitungsrate der Maschine ist ein gutes Maß, um den Fortschritt des Projekts sichtbar zu machen oder den Erfolg einzelner Maßnahmen zu überprüfen. Dazu wird nach jeder großen Änderung und zu jedem Meilenstein ein Sortierprozess gestartet und für eine gewisse Zeit beobachtet. Anschließend wird aus der Anzahl der erfolgreich sortierten Teile und der dabei benötigten Zeit die Verarbeitungsrate in Teile pro 10 Minuten ermittelt. Zusätzlich wird über die Differenz der zugeführten und im ersten Durchlauf richtig sortierten Teile die Sortierung in Prozent berechnet. Dabei ist zu beachten, dass seit dem 11.01.2019 zum Zweck der Vereinzelung Teile aus dem Prozess genommen werden, bevor sie die Bildverarbeitung erreichen. Die Sortierung in Prozent ist daher kein Gütekriterium der Bildverarbeitung.
Die folgende Tabelle zeigt eine Auswahl von ermittelten Verarbeitungsraten, um den Verlauf des Projekts zu verdeutlichen.
| Datum | Anzahl zugeführte Teile | Anzahl erfolgreich sortierte Teile | Dauer | Verarbeitungsrate Teile/10min | Sortierung in % | Kommentar |
|---|---|---|---|---|---|---|
| 23.04.18 | 50 | 13 | 10 Minuten | 13,0 | 26 | Ausgangssituation nach Übernahme des Projekts |
| 25.06.18 | 81 | 54 | 9,5 Minuten | 56,84 | 66,67 | Ergebnis des SS18 |
| 11.01.19 | 326 | 270 | 23,3 Minuten | 115,88 | 82,82209 | Umbau der Separierung und Integration der Sortiereinheit |
| 17.01.19 | 175 | 122 | 10 Minuten | 122,00 | 69,71429 | Programmtechnische Optimierung |
Wie der Tabelle zu entnehmen ist, konnte die Verarbeitungsrate seit Übernahme des Projekts signifikant gesteigert werden. Der im Pflichtenheft vereinbarte Mindestwert der Verarbeitungsrate von 120 Teilen in 10 Minuten ist zu Meilenstein 4 erreicht worden. Das Projekt kann also als erfolgreich bearbeitet angesehen werden.
[2]
Inbetriebnahmeprotokoll
In einem Inbetriebnahmeprotokoll wurde die Legosortiermaschine im Juni 2018 in Betrieb genommen. Folgende Requirements wurden in diesem Protokoll bearbeitet und als Ergebnis in SVN festgehalten:
| Spezifikations-ID | Anforderungs-ID | Anforderungstitel | Beschreibung der Spezifikation |
|---|---|---|---|
| 0020 | REQ10.2010 | Antriebe | Elektrischer Antrieb muss vorhanden sein |
| 0030 | REQ10.2020 | Energieversorgung | Per 230V AC Schukostecker |
| 0040 | REQ10.2030 | Abmessung | 2,5m x 1m x 1,5m Grundplattenmontage |
| 0056 | REQ10.2040 | Sicherheit/ Gefährdungsbeurteilung | Drucken und Anbringen von Warnhinweisen |
Das Inbetriebnahmeprotokoll ist unter folgendem Link zu finden: Inbetriebnahmeprotokoll
Der Systemtest der elektrischen Antriebe wurde zudem in einem Protokoll festgehalten und ist unter folgendem Link zu finden: Systemtest elektrische Antriebe
Gefährdungsbeurteilung
Eine Gefährdungsbeurteilung wurde im Juni 2018 erstellt.
Die Gefährdungsbeurteilung wurde in tabellarischer Form angelegt und listet mögliche Gefahren der Legosortiermaschine auf. Von der Grundausstattung über elektrische und mechanische Gefährdungen, wurden auch Gefahrstoffe und Brandgefährdungen kontrolliert.
Mögliche Gefahren wurden dabei in folgende Risikostufen eingeteilt:
- Kein Risiko
- Geringes Risiko
- Großes Risiko
Anhand der Risikostufe werden desweiteren Lösungsmaßnahmen sowie Termine zur Fehlerbehebung festgelegt.
Es wurden die folgenden drei Risiken erkannt:
1.) Eine Betriebsanweisung ist erstellt worden?
Das Risiko wurde als gering eingeschätzt und es wurde die Pflicht aufgenommen, eine Betriebsanweisung zum Meilenstein 4 zu erstellen.
2.) Bewegte Transportmittel, bewegte Arbeitsmittel
Für das Förderband gibt es momentan lediglich einen Warnhinweis und keinen materiellen Einklemmschutz. Dieses Risiko wurde als gering eingeschätzt und zum Meilenstein 3 wird ein Schutz angebracht werden.
3.) Unkontrollierte bewegte Teile
Nach der Bildverarbeitung werden die Legoteile "ausgeschossen". Dieses Risiko wurde ebenfalls als gering eingestuft. Als Maßnahme gilt der Zusammenbau der Sortiereinheit, welcher anschließend vor der Bildverarbeitung positioniert wird.
Die gesamte Gefährdungsbeurteilung wurde in SVN abgelegt und ist unter folgendem Link zu finden: Gefährdungsbeurteilung
Software Dokumentation
Allgemeine Informationen

| Spezifikations-ID | Anforderungs-ID | Anforderungstitel | Beschreibung der Spezifikation |
|---|---|---|---|
| 410 | REQ10.2320 | Modellierung der System- und Softwarearchitektur | Geeignete Software für System- und Softwarearchitektur verwenden (zb. MS Visio) |
Eine Softwarearchitektur beschreibt die grundlegenden Komponenten und deren Zusammenspiel innerhalb eines Softwaresystems.
Eine Systemarchitektur wird nach dem V-Modell XT im Rahmen des Systementwurfs erstellt und umfasst die Dekomposition des Systems, die Schnittstellenübersicht und den übergreifenden Datenkatalog (Daten, die Systeme und Systemelemente austauschen).
Zu Beginn der Systemarchitekturarbeiten werden, durch Analyse der Gesamtsystemspezifikation und weiterer vorhandener Informationen, Architekturtreiber identifiziert und Bewertungskriterien festgelegt. Funktionale und nicht-funktionale Anforderungen beeinflussen den Entwurf der Systemarchitektur, die in Architektursichten dokumentiert wird.
Für die System- und Softwarearchitektur müssen Programme verwendet werden die kostenfrei sind oder durch die Hochschule zur Verfügung gestellt werden.
Beipielhaft können folgende Programme verwendet werden:
- PapDesigner
- MS Visio
- Clickcharts
- Dia
- XMind
- FreeeMind
Für den Ablauf der Legosortiermaschine wurde mit der Software PAP-Designer ein Ablaufplan erstellt. In der neben stehenden Abbildung 3 ist ein Auszug zu sehen.
Das Dokument ist unter folgendem Link abrufbar:
Dateien sollten nicht als PDF oder Bilder gespeichert werden um nachfolgenden Gruppen die Weiterbearbeitung und Ergänzung zu ermöglichen.
MATLAB Dokumentation
| Spezifikations-ID | Anforderungs-ID | Anforderungstitel | Beschreibung der Spezifikation | Arbeitsergebnis |
|---|---|---|---|---|
| 0530 | REQ10.3310 | Dokumentation von Software | Geeignete Software zur Dokumentation des Quellcodes (zb LaTeX oder Doxygen) | MATLAB mit m2html |
| 0531 | REQ10.3311 | Dokumentation von Software | Video zur Bedienung von m2html | Videoanleitung |


Die MATLAB Dokumentation wurde mit m2html erstellt. Es handelt sich dabei um ein doxygen-ähnliches Werkzeug, welches die Quelldateien eines Projektes automatisch analysiert und eine im Webbrowser benutzbare Dokumentation erstellt. Hierbei werden für jede Quelldatei Funktionsname, Kopf, Eingabe- und Ausgabeparameter, sowie Zugriffe von und auf andere Funktionen im Projekt untersucht und übersichtlich dargestellt. Zu den Funktionszugriffen wird optional auch ein Graph erstellt, wie in ABB gezeigt. Da das Tool für eine sehr alte MATLAB-Version geschrieben wurde, sind einige Funktionen, unter anderem die Benutzeroberfläche zur einfachen Bedienung nicht mehr vollständig benutzbar. Zudem musste der Algorithmus zur Code-Analyse an einigen Stellen leicht abgeändert werden, um mit den neu erstellten Richtlinien zur Codegestaltung zu funktionieren. Weitere Änderungen können falls nötig in mfileparse.m vorgenommen werden. Die Anleitung sowie ein kurzes Bedienungs- und Demovideo sind im SVN zu finden.
Nach der Erstellung der Dokumentation kann diese mit dem öffnen der index.html im Dokumentationsordner eingesehen werden. Die Übersicht sowie eine beispielhafte Funktionsinformation sind im folgenden in Abbildung 4 bzw. 5 dargestellt.
Arduino Dokumentation

| Spezifikations-ID | Anforderungs-ID | Anforderungstitel | Beschreibung der Spezifikation | Arbeitsergebnis |
|---|---|---|---|---|
| 0530 | REQ10.3310 | Dokumentation von Software | Geeignete Software zur Dokumentation des Quellcodes (zb LaTeX oder Doxygen) | Arduino mit PapDesigner |
Die Arduino Dokumentation beschränkt sich auf eine einzelne Datei, welche die via USB empfangenen seriellen Daten auswertet und die jeweiligen Elemente der Maschine entsprechend ansteuert. Da sich somit keine komplexen Zusammenhänge zwischen verschiedenen Dateien im Programm ergeben, wurde für den Code mithilfe von PapDesigner ein genauer Ablaufplan in PapDesigner erstellt. Das Ergebnis ist in Abbildung 6 zu sehen.
Dokumentation
Die Ergebnisse des Projektes wurden, wie in Spezifikation 0330 gefordert, nachvollziehbar und nachbaubar dokumentiert. Die gesamten Dateien und Unterlagen zur Dokumentation sind strukturiert in SVN gesichert und versioniert. Abbildung 7 zeigt eine Übersicht der Dokumentationen, die im WS18/19 anzufertigen waren. Mit Hilfe der dort dargestellten Tabelle wurde die Vollständigkeit sowie der Fortschritt der Dokumentation überprüft.

Zusammenfassung
Dieser Artikel beschreibt Punkte zur Hardware und Software, die auf die gesamte Anlage bezogen sind. Umgesetzte Punkte sind die folgenden:
Liste offener Punkte (LoP)
- Separate Absicherung der 5V und 24V Stromkreise (Benötigte Materialien bereits in BOM eingetragen, Bestellung war zum Jahresende nicht mehr möglich)
- Provisorischen Vorwiderstand der Vibrationsförderrinne durch Potentiometer ersetzen (Benötigte Materialien bereits in BOM eingetragen, Bestellung war zum Jahresende nicht mehr möglich)
Autoren
Dies ist ein Unterartikel von der Legoteil_Zählmaschine, welcher die Zusammenführung der einzelnen Teile zu einer Einheit beschrieben.