Pentomino Puzzle: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (401 dazwischenliegende Versionen von 2 Benutzern werden nicht angezeigt) | |||
| Zeile 1: | Zeile 1: | ||
[[Kategorie:Projekte]] | [[Kategorie:Projekte]] | ||
[[Kategorie:ProjekteET MTR BSE | [[Kategorie:ProjekteET MTR BSE WS2024]] | ||
[[Kategorie:Escape Game]] | [[Kategorie:Escape Game]] | ||
<!-- Kopieren Sie diesen Header in Ihren Artikel, damit er aufgelistet wird. --> | <!-- Kopieren Sie diesen Header in Ihren Artikel, damit er aufgelistet wird. --> | ||
→ zurück zur Übersicht: [[:Kategorie:ProjekteET_MTR_BSE_WS2024|WS 24/25: Escape Game]] | |||
{| class="wikitable" | {| class="wikitable" | ||
|- | |- | ||
|''' | |'''Autoren:''' || [[Benutzer:Kevin Ernst|Kevin Ernst ]] und [[Benutzer:Timo Roch| Timo Roch]] | ||
|- | |- | ||
|'''Betreuer:'''|| | |'''Betreuer:'''|| [[Benutzer:Prof._Mirek_Göbel| Prof. Göbel]] ''' | ||
|- | |- | ||
|} | |} | ||
''' | '''Autoren:''' Timo Roch und Kevin Ernst | ||
[[Datei: | [[Datei:Beispielbild_Pentomino2.jpeg|500px|mini|alternativtext= Beispielbild des Pentomino Spiels| Abb. 1. Pentomino Puzzle]] | ||
== Einleitung == | == Einleitung == | ||
Das mechatronische Pentomino Puzzle stellt eine Weiterentwicklung des klassischen geometrischen Rätsels dar. Durch den Einsatz von Magneten, Hall-Sensoren und einem Arduino-Mikrocontroller wird das traditionelle Spiel in ein elektronisches Puzzle für | Ein Pentomino ist eine geometrische Figur, die aus fünf gleich großen Quadraten besteht, wobei diese Quadrate entlang ihrer Kanten miteinander verbunden sind. Der Begriff "Pentomino" bezieht sich sowohl auf die einzelnen Figuren als auch auf das darauf basierendes Geduldsspiel, bei dem ein Spieler eine bestimmte Anzahl an Pentomino Spielsteine in einem Spielbrett so anordnen muss, dass alle Spielsteine im Spielbrett platz finden. <br> | ||
Das mechatronische Pentomino Puzzle stellt eine Weiterentwicklung des klassischen geometrischen Rätsels dar. Durch den Einsatz von Magneten, Hall-Sensoren und einem Arduino-Mikrocontroller wird das traditionelle Spiel in ein elektronisches Puzzle für ein Escape Game verwandelt. Diese Zusammenführung von Mechanik und Elektronik schafft eine einzigartige Spielerfahrung, die sowohl die räumliche Vorstellungskraft als auch das logische Denken der Teilnehmer herausfordert. Damit ist das Pentomino Puzzle ideal für die Umsetzung des Projektes im Fachpraktikum Mechatronik im Masterstudiengang Business and Systems Engineering. [[:Kategorie:ProjekteET_MTR_BSE_WS2024|WS 24/25: Escape Game]] | |||
Escape Rooms sind teambasierte Spiele, bei denen Spieler Rätsel lösen, Experimente durchführen und Aufgaben erfüllen. | Escape Rooms sind teambasierte Spiele, bei denen Spieler Rätsel lösen, Experimente durchführen und Aufgaben erfüllen. | ||
Wird das Puzzle richtig gelöst wird ein vierstelliger Zahlencode ausgegeben, um das nächste Escape Game spielen zu können. | Wird das Puzzle richtig gelöst, wird ein vierstelliger Zahlencode ausgegeben, um das nächste Escape Game spielen zu können. | ||
== Anforderungen == | == Anforderungen == | ||
| Zeile 30: | Zeile 33: | ||
* Stellen Sie für jedes Rätsel für die Spielleiter*in Tipps und Musterlösung bereit. | * Stellen Sie für jedes Rätsel für die Spielleiter*in Tipps und Musterlösung bereit. | ||
* Zur Lösung der Haupträtsel darf, sofern der Bedarf bestehen sollte, in den entsprechend bereit gestellten Fachbüchern nachgelesen werden. Eine Internetrecherche (durch Handys, Tablets, Laptops) ist nicht erlaubt, das heißt digidetox = digital detoxification (digitale Entgiftung) spielt daher auch eine Rolle. | * Zur Lösung der Haupträtsel darf, sofern der Bedarf bestehen sollte, in den entsprechend bereit gestellten Fachbüchern nachgelesen werden. Eine Internetrecherche (durch Handys, Tablets, Laptops) ist nicht erlaubt, das heißt digidetox = digital detoxification (digitale Entgiftung) spielt daher auch eine Rolle. | ||
{| class="wikitable" | |||
|+ style = "text-align: left"| Tabelle 1: Anforderungsliste (Lastenheft) | |||
|- | |||
! Nr. !! Priorisierung !! Anforderung !! Bemerkung !! Erstellt | |||
|- | |||
|1 || Gering || Das Puzzle muss in einen Schuhkarton passen. || || 03.10.2024 | |||
|- | |||
|2 || Mittel || Das Rätsel soll für Escape-Room-Einsteiger geeignet sein. || Schwierigkeitslevel: Einsteiger || 03.10.2024 | |||
|- | |||
|3 || Hoch || Die Lösungszeit soll maximal 5 Minuten betragen. || Hinweise nach 3 und 4 Minuten || 03.10.2024 | |||
|- | |||
|4 || Hoch || Die Ausgabe erfolgt bei korrekter Lösung als Vierstelliger Zahlencode. || || 03.10.2024 | |||
|- | |||
|5 || Mittel || Automatische Erkennung der richtigen Lösung || || 03.10.2024 | |||
|- | |||
|6 || Mittel || Einzelteile möglichst mit 3D-Druck fertigbar. || || 04.10.2024 | |||
|- | |||
|7 || Hoch || Der Mikrocontroller muss vom Typ Arduino Uno R3 sein. || || 04.10.2024 | |||
|- | |||
|8 || Hoch || Der Ausgabemechanismus soll mit einem Servo-Motor realisiert werden. || || 03.10.2024 | |||
|- | |||
|9 || Hoch || Nach dem Spielende soll ein Reset durchgefürt werden können. || Anschließend kann erneut gespielt werden || 03.10.2024 | |||
|- | |||
|10 || Hoch || Die Stromversorgung soll mit einem Steckernetzteil geeignet für einen Arduino erfolgen. || || 03.10.2024 | |||
|- | |||
|11 || Hoch || Es soll ein An/Aus-Schalter eingebaut werden. || || 03.10.2024 | |||
|- | |||
|12 || Hoch || Das Hauptprogramm soll kontinuierlich den Systemzustand überprüfen und den Servo-Motor zur Codeausgabe steuern. || || 03.10.2024 | |||
|- | |||
|13 || Mittel || Es soll eine Initialisierungsroutine für den Systemstart vorgesehen werden. || || 03.10.2024 | |||
|- | |||
|14 || Hoch || Das Arduino-System soll über Matlab-Simulink-Funktionen gesteuert werden. || || 03.10.2024 | |||
|- | |||
|15 || Mittel || Das System muss benutzerfreundlich und für Kinder wie Erwachsene geeignet sein. || || 03.10.2024 | |||
|- | |||
|16 || Hoch || Es müssen Tipps und Musterlösungen für Spielleiter bereitgestellt werden. || || 03.10.2024 | |||
|- | |||
|18 || Hoch || Es soll nur eine Lösungsmöglichkeit für das Puzzle geben. || z.B. durch Spezielle Form von Spielbrett und Spielsteinen || 04.10.2024 | |||
|- | |||
|} | |||
<br> | |||
<br> | |||
== Funktionaler Systementwurf/Technischer Systementwurf == | == Funktionaler Systementwurf/Technischer Systementwurf == | ||
[[Datei:Skizze_Pentomino.png| | [[Datei:Skizze_Pentomino.png| 800px | thumb | mini | alternativtext=Spielidee | Abb. 2. Spielidee]] | ||
Der funktionale Systementwurf sieht ein Spielbrett vor, in das Hall-Sensoren eingebettet sind. Die Pentomino-Teile werden mit Magneten ausgestattet, deren Position für jedes Teil einzigartig ist. Ein Arduino Uno verarbeitet die Signale der Hall-Sensoren und steuert ein Servomotor so an, dass die Ausgabe des vierstelligen Codes erfolgt. | |||
Aus den Anforderungen wurde im nächsten Schritt eine erste Spielidee entworfen, die alle Anforderungen erfüllt. | |||
Der funktionale Systementwurf aus Abbildung 2 sieht ein Spielbrett vor, in das Hall-Sensoren eingebettet sind. Die Pentomino-Teile werden mit Magneten ausgestattet, deren Position für jedes Teil einzigartig ist. Ein Arduino Uno verarbeitet die Signale der Hall-Sensoren und steuert ein Servomotor so an, dass die Ausgabe des vierstelligen Codes erfolgt. | |||
<br> | <br> | ||
Bei der technischen Konzeption spielt die Gestaltung des Spielbretts und der Spielsteine eine entscheidende Rolle. Die besondere Form dieser Elemente ist darauf ausgerichtet, dass für das Pentomino-Rätsel nur eine einzige korrekte Lösung existiert. Diese Eindeutigkeit ist von besonderer Wichtigkeit, um zu gewährleisten, dass die Magnete immer genau an den vorgesehenen Positionen platziert werden. Zur Erstellung des Spielbrettes und der Spielsteine wurde ein Online-Tool verwendet. Dieses kann von folgender [https://www.pentoma.de/download-loesungsprogramme Website]<ref name="Pentomino-Puzzle erstellen"> https://www.pentoma.de/download-loesungsprogramme Pentomino-Puzzle erstellen</ref> heruntergeladen werden und zur Erstellung von Pentomino-Puzzeln verwendet werden. | |||
Durch diesen Ansatz wird nicht nur die Funktionalität des Spiels sichergestellt, sondern auch die Herausforderung für den Spieler auf ein gut lösbares Niveau gebracht. | |||
<br> | <br> | ||
| Zeile 52: | Zeile 98: | ||
* Mechanische Ausgabe des vierstelligen Codes | * Mechanische Ausgabe des vierstelligen Codes | ||
* Stromversorgung über Stromkabel | * Stromversorgung über Stromkabel | ||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
'''Technischer Systementwurf:''' | '''Technischer Systementwurf:''' | ||
[[Datei: Pentomino_Puzzle_Technischer_Systementwurf.png | 600px | thumb | mini | alternativtext= | [[Datei: Pentomino_Puzzle_Technischer_Systementwurf.png | 600px | thumb | mini | alternativtext= Technischer Systementwurf | Abb. 3. Technischer Systementwurf ]] | ||
Der in der Abbildung dargestellte technische Systementwurf zeigt die Architektur des Arduino-basierten Pentomino Puzzles. | Der in der Abbildung 3 dargestellte technische Systementwurf zeigt die Architektur des Arduino-basierten Pentomino Puzzles. | ||
Eingabekomponenten | Eingabekomponenten | ||
| Zeile 71: | Zeile 122: | ||
* Digitaler Eingang: DI für den Reset-Taster | * Digitaler Eingang: DI für den Reset-Taster | ||
* PWM-Ausgang: PWM3 zur Motorsteuerung | * PWM-Ausgang: PWM3 zur Motorsteuerung | ||
* Digital Output 4: NPN-Transistor zur Motorabschaltung | |||
* Stromversorgung: Separate Spannungsquelle zur Systemversorgung | * Stromversorgung: Separate Spannungsquelle zur Systemversorgung | ||
| Zeile 77: | Zeile 129: | ||
{| class="wikitable" | {| class="wikitable" | ||
|+ style = "text-align: left"| Tabelle | |+ style = "text-align: left"| Tabelle 2: Materialliste (BOM) | ||
|- | |- | ||
! Nr. !! Anz. !! Beschreibung | ! Nr. !! Anz. !! Beschreibung | ||
| Zeile 99: | Zeile 151: | ||
|9 || 1 || An/Aus-Schalter TRU COMPONENTS 700185 Wippschalter R13-112A B/B 0-I 250 V/AC 6 A 1 x Aus/Ein rastend [https://www.conrad.de/de/p/tru-components-700185-wippschalter-r13-112a-b-b-0-i-250-v-ac-6-a-1-x-aus-ein-rastend-1-st-1565955.html] | |9 || 1 || An/Aus-Schalter TRU COMPONENTS 700185 Wippschalter R13-112A B/B 0-I 250 V/AC 6 A 1 x Aus/Ein rastend [https://www.conrad.de/de/p/tru-components-700185-wippschalter-r13-112a-b-b-0-i-250-v-ac-6-a-1-x-aus-ein-rastend-1-st-1565955.html] | ||
|- | |- | ||
|10 || 1 || Diotec Transistor (BJT) - diskret BC548C TO-92 Anzahl Kanäle 1 NPN [https://www.conrad.de/de/p/diotec-transistor-bjt-diskret-bc548c-to-92-anzahl-kanaele-1-npn-155039.html?gclsrc=aw.ds&utm_source=google&gad_source=1&utm_medium=cpc&utm_campaign=DE+-+Search+-+Non+Brand+-+Aktive+Bauelemente+-+Halbleiter&utm_id=21561701503&gclid=EAIaIQobChMIls26_LjhigMVMZKDBx1-HCd-EAAYAiAAEgJjj_D_BwE&gclsrc=aw.ds&refresh=true] | |||
|- | |||
|} | |} | ||
== Umsetzung (HW/SW) == | == Umsetzung (HW/SW) == | ||
=== | ===Hardware=== | ||
'''Konstruktion''' | '''Konstruktion''' | ||
Das Spielbrett, die Puzzleteile und das Gehäuse wurden in SolidWorks konstruiert. SolidWorks ermöglichte eine einfache Modellierung aller Komponenten unter Berücksichtigung der spezifischen Anforderungen des Spiels. Nach Abschluss der Konstruktion wurden die Modelle im | Das Spielbrett, die Puzzleteile und das Gehäuse wurden in SolidWorks konstruiert. SolidWorks ermöglichte eine einfache Modellierung aller Komponenten unter Berücksichtigung der spezifischen Anforderungen des Spiels. Nach Abschluss der Konstruktion wurden die Modelle im STL-Dateiformat gespeichert, um für den 3D-Druck nutzbar zu sein. Die besondere Herausforderung bei der Konstruktion bestand in der Geheimklappe selbst. Diese sollte separat gedruckt und später in die Geheimbox eingesetzt werden können. Dafür wurde einer der beiden Stifte, um die sich die Klappe später drehen soll, als Federmechanismus gestaltet. Dieser Stift kann eingedrückt werden, um die Klappe in die Geheimbox einzusetzen. | ||
Eine weitere Herausforderung stellte der Schließmechanismus der Klappe dar. Dieser wurde so konstruiert, dass ein Servomotor die Klappe sowohl öffnen als auch sicher verschließen kann. Hierbei kann ein bewegliches Schloss beim Schließen der Klappe über die Sperrstellung des Servomotors hinwegdrehen. In die entgegengesetzte Richtung lässt sich das Schloss jedoch nicht zurückdrücken, es sei denn, der Motor bewegt es aktiv nach vorne. Nach dem ersten Testdruck stellte sich heraus, dass das Schloss zu klein und zu leicht war, um die innere Reibung zu überwinden. Dadurch drehte es sich nicht zuverlässig. Um dieses Problem zu lösen, wurde am Ende des Schlosses ein kleiner Metallstift eingesetzt, der dafür sorgt, dass sich das Schloss nun immer vertikal ausrichtet. | |||
<br> | |||
<gallery widths="300px" heights="300px" captionalign="center"> | |||
BG_Pentomino_Puzzle.PNG| Abb. 4. Baugruppe Pentomino Puzzle | |||
Verschluss.PNG | Abb. 5. Verschlussmechanismus | |||
Feder und klappe.PNG | Abb. 6. Feder und Klappe | |||
Gesamtaufbau_Konstruktion.PNG | Abb. 7. Gesamtaufbau Pentomino-Puzzle | |||
</gallery> | |||
<br> | |||
'''Vorbereitung für den 3D-Druck''' | '''Vorbereitung für den 3D-Druck''' | ||
Die erstellten | Die erstellten STL-Dateien wurden anschließend in den Bambulab-Slicer importiert. Dieser spezielle Slicer ist darauf ausgelegt, 3D-Modelle für den Druck mit Bambulab-Druckern vorzubereiten, indem er sie in dünne Schichten zerlegt und den Druckpfad für den 3D-Drucker generiert. | ||
<br> | |||
'''Druckeinstellungen und Materialwahl''' | '''Druckeinstellungen und Materialwahl''' | ||
Im Bambulab-Slicer wurden die spezifischen Druckeigenschaften sorgfältig eingestellt. Diese Einstellungen umfassen Parameter wie: | Im Bambulab-Slicer wurden die spezifischen Druckeigenschaften sorgfältig eingestellt. Diese Einstellungen umfassen Parameter wie: | ||
* Schichthöhe | * Schichthöhe: 0,1 mm für Spielbrett sonst alle Komponenten 0,2 mm | ||
* Druckgeschwindigkeit | * Druckgeschwindigkeit: Abhängig von Drucker und Material --> Standard für PLA sollte bevorzugt werden | ||
* Füllgrad | * Füllgrad: 15-20 % | ||
* Struktur der Füllung | * Struktur der Füllung: Einfache Linien (Monotonisch) | ||
* Temperatur für Druckbett und Düse | * Temperatur für Druckbett und Düse: Abhängig von Material (Für PLA ca.: Druckbett 40 Düse 220 Grad) | ||
Als Druckmaterial wurde PLA (Polylactid) gewählt, ein biologisch abbaubarer Kunststoff, der sich durch gute Druckeigenschaften und eine glatte Oberfläche auszeichnet. | Als Druckmaterial wurde PLA (Polylactid) von Bambulab gewählt, ein biologisch abbaubarer Kunststoff, der sich durch gute Druckeigenschaften und eine glatte Oberfläche auszeichnet. | ||
<br> | |||
'''Druckprozess mit Magnetintegration''' | '''Druckprozess mit Magnetintegration''' | ||
Der Druckvorgang selbst war besonders interessant, da er die Integration von Magneten in die Puzzleteile beinhaltete. | Der Druckvorgang selbst war besonders interessant, da er die Integration von Magneten in die Puzzleteile und der Klappe beinhaltete. | ||
Dieser Prozess lief wie folgt ab: | Dieser Prozess lief wie folgt ab: | ||
# Start des Druckvorgangs mit den vorbereiteten Einstellungen. | # Start des Druckvorgangs mit den vorbereiteten Einstellungen. | ||
| Zeile 131: | Zeile 197: | ||
# Manuelles Einsetzen der Magnete in die vorgesehenen Aussparungen. | # Manuelles Einsetzen der Magnete in die vorgesehenen Aussparungen. | ||
# Fortsetzen des Druckvorgangs, wobei die nachfolgenden Schichten die Magnete fest umschlossen und integrierten. | # Fortsetzen des Druckvorgangs, wobei die nachfolgenden Schichten die Magnete fest umschlossen und integrierten. | ||
Diese Methode ermöglichte eine nahtlose Integration der Magnete in die Puzzleteile, ohne dass nachträgliche | Diese Methode ermöglichte eine nahtlose Integration der Magnete in die Puzzleteile, ohne dass nachträgliche Materialbearbeitungen erforderlich waren. | ||
<br> | |||
<br> | |||
'''Funktionsweise von Hall-Sensoren''' | |||
<br> | |||
Ein Hall-Sensor besteht aus einem dünnen Halbleiterplättchen, durch das ein elektrischer Strom fließt. Wenn ein Magnetfeld senkrecht auf dieses Plättchen einwirkt, werden die Ladungsträger im Halbleiter durch die Lorentzkraft abgelenkt. Diese Ablenkung führt zur Entstehung einer elektrischen Spannung quer zur Stromrichtung, der sogenannten Hall-Spannung. | |||
Die Hall-Spannung ist proportional zur Stärke des einwirkenden Magnetfeldes. Moderne Hall-Sensoren integrieren zusätzliche Elektronik auf dem Chip, um diese Spannung zu verstärken und in ein verwertbares Ausgangssignal umzuwandeln. Je nach Anwendung kann dieses Signal analog oder digital sein: | |||
Analoge Hall-Sensoren: | |||
*Liefern ein kontinuierliches Spannungssignal, das proportional zur Magnetfeldstärke ist. | |||
Digitale Hall-Sensoren: | |||
*Vergleichen die gemessene Magnetfeldstärke mit einem Schwellwert und schalten ihren Ausgang entsprechend um. | |||
Für den Aufbau wurden analoge Hall-Sensoren vom Typ 49E verwendet. Diese liefern ein kontinuierliches Spannungssignal, das proportional zur Magnetfeldstärke ist | |||
<br> | |||
<br> | |||
'''Schaltplan / Verdrahtungsplan'''<br> | |||
Der Schaltplan zeigt eine elektronische Schaltung mit folgenden Hauptkomponenten: | |||
Sensoren und Eingänge | |||
*6 Hall-Effekt-Sensoren, jeweils mit 3 Pins ausgestattet | |||
*Ein Taster als Eingabeelement für den Reset | |||
Zentrale Steuerung | |||
*Arduino Uno Mikrocontroller mit verschiedenen Ein- und Ausgängen | |||
*Stromversorgung der Einzelkomponenten vom Arduino über 3,3V und 5V Anschlüsse | |||
*GND (Ground) vom Arduino, Verbindung für die Masseleitung | |||
Ausgänge | |||
*Digital Output 3 (PWM) zur Steuerung des Servo-Motor mit Pulsteuerung | |||
**Ein BC548C Transistor als Schaltelement, zur Motorabschaltung | |||
Verkabelung | |||
*Die Verkabelung ist farblich kodiert: | |||
**Rote Leitungen für die Stromversorgung | |||
**Grüne und Gelbe Leitungen für Signalleitungen | |||
Die Hall-Effekt-Sensoren sind parallel geschaltet und werden zur Positionserkennung der Magnete in den Spielsteinen verwendet. Der Servo-Motor kann über den Mikrocontroller präzise angesteuert werden, während der Transistor BC548C als Schaltverstärker und zum Abschalten dient. Der Taster fungiert als Reset-Knopf. | |||
<br> | <br> | ||
<br> | <br> | ||
=== | |||
<gallery widths="460px" heights="280px" captionalign="center"> | |||
Steckplatine_Pentomino_Steckplatine.jpg| Abb. 8. Verdrahtungsplan | |||
Schaltplan_Pentomino_Schaltplan.jpg | Abb. 9. Schaltplan | |||
</gallery> | |||
===Software=== | |||
'''Software-Planung''' | |||
Für die Software-Planung wurden zunächst die grundlegenden Anforderungen durch Brainstorming definiert. | |||
*Erkennung von 6 Magneten durch Hall-Sensoren | |||
*Steuerung einer Geheimklappe (öffnen/schließen) | |||
*Steuerung eines Servomotors (öffnen/verriegeln) | |||
*Implementierung eines Reset-Tasters (Zurücksetzten das Spiels) | |||
*Kontinuierliche Überprüfung des Systemzustands | |||
*Motor benötigt Zeit zum Auf- und Zufahren | |||
Anschließend erfolgte Festlegung möglicher Zustände die das Programm abdecken muss. | |||
#Spiel eingeschaltet ⇒ Klappe verriegeln | |||
#Klappe verriegelt und Reset Taster Gedrückt ⇒ Keine Reaktion des Systems | |||
#Spielsteine eingelegt ⇒ Klappe öffnen | |||
#Spielsteine eingelegt und Reset-Taster gedrückt ⇒ Keine Reaktion des Systems | |||
#Reset-Taster gedrückt und Spielsteine entfernt ⇒ Klappe verriegeln | |||
<br> | |||
'''Programmablaufplan''' | '''Programmablaufplan''' | ||
[[Datei: Programmablaufplan_Pentomino.png |rechts|200px|mini|alternativtext= Programmablaufplan| Abb. 10. Programmablaufplan]] | |||
Der Programmablaufplan für das Pentomino Puzzle läuft wie folgt ab:<br> | |||
Hauptablauf | |||
*Start des Programms | |||
*Initialisierung der Komponenten | |||
*Übergang in die Main Loop | |||
Prüfungsphase | |||
*Geheimklappe wird verriegelt | |||
*Kontinuierliche Überprüfung der 6 Magnete durch Hall-Sensoren | |||
*Bei erfolgreicher Erkennung aller Magnete: | |||
**Geheimklappe wird geöffnet | |||
**Nach kurzer Zeit fährt der Motor in die Neutralstellung | |||
Wartephase | |||
*Eintritt in Warte-Loop | |||
*Überprüfung ob: | |||
**Spielsteine entfernt wurden | |||
**und Reset-Taster gedrückt wurde | |||
*Falls nicht erfüllt: Zurück zum Warte Loop | |||
*Bei Erfüllung: Rückkehr zur Main Loop | |||
<br> | <br> | ||
| Zeile 158: | Zeile 291: | ||
<br> | <br> | ||
<br> | <br> | ||
'''Modellbasierte Programmierung''' | |||
[[Datei: ProgrammPentomino_Simulink.png |rechts|650px|mini|alternativtext= Simulink Programm| Abb. 11. Simulink Modell Pentomino]] | |||
Das Programm für den Arduino wurde mithilfe von MATLAB und Simulink entwickelt. Um einen Arduino mit MATLAB oder Simulink zu programmieren, müssen zunächst die entsprechenden Add-Ons installiert werden. Eine Anleitung hierzu finden Sie [https://de.mathworks.com/discovery/arduino-programming-matlab-simulink.html hier]<ref name="Arduino Erweiterung Matlab"> https://de.mathworks.com/discovery/arduino-programming-matlab-simulink.html Arduino Erweiterung Matlab</ref>. | |||
Zu Beginn wurde ein neues Simulink-Modell erstellt und, wie bei allen MATLAB/Simulink-Modellen, die Modellparameter angepasst. Eine feste Schrittweite von 0,001 Sekunden wurde gewählt, sodass das erzeugte Programm einmal pro Millisekunde ausgeführt wird. | |||
Im nächsten Schritt wurden die Ein- und Ausgänge des Arduino aus der Simulink-Bibliothek als vorgefertigte Blöcke in den Programmierbereich gezogen: | |||
*Hallsensoren: Analoge Eingänge A0 bis A5. | |||
*Taster: Digitaler Eingang mit auf „Pullup“ eingestelltem PinMode. | |||
*Servomotor-Steuerung: | |||
**Ein digitaler Ausgang steuert die Versorgungsspannung des Motors über einen Bipolartransistor. | |||
**Ein Arduino-Block überträgt den Drehwinkel an den Servomotor über den PWM-Ausgang 3. | |||
Abschließend wurden alle Bausteine so konfiguriert, dass ihre Sample-Time auf „Inf“ gesetzt wurde. Dies stellt sicher, dass sie mit der definierten Schrittweite von 0,001 Sekunden abgefragt werden können. | |||
Für den eigentlichen Programmablauf wurden MATLAB-Funktionen verwendet. In der ersten Funktion wird der vom Taster eingelesene Zustand durch einen Bit-Schiebealgorithmus entprellt. Dies bedeutet, dass auch bei schnellen Änderungen des Tasterzustands in kurzen Abständen der endgültige Zustand stabilisiert wird, sodass der Funktion "Steuerung_Pentomino" ein definierter Zustand übergeben wird. | |||
In der Funktion „Steuerung_Pentomino“ werden zunächst Variablen initialisiert. Beispielsweise werden die einzelnen Motorpositionen und die dazugehörigen Drehwinkel definiert. Das Programm ist so aufgebaut, dass es für jeden Zustand, den der Motor einnehmen kann, sowie für die dazugehörigen Bewegungen zwischen den Zuständen jeweils eine separate Case-Anweisung gibt. Dadurch wird sichergestellt, dass bei jedem Funktionsaufruf genau eine der Cases erfüllt ist. So wird verhindert, dass das Spiel gleichzeitig in mehreren Zuständen sein könnte. | |||
<br> | <br> | ||
<br> | <br> | ||
<div style="width: 650px; height: 500px; overflow-x: scroll; overflow-y: scroll; white-space: pre-wrap; border: 1px solid #ccc; float: right; margin-left: 20px;"> | |||
<pre> | |||
%*************************************************************** * | |||
% Hochschule Hamm-Lippstadt * | |||
%*************************************************************** * | |||
% Modul : * | |||
% * | |||
% Datum : 07.01.2024 * | |||
% * | |||
% Funktion : Ansteuerung der Motoren einer Geheimbox * | |||
% * | |||
% Implementation : MATLAB 2024b * | |||
% * | |||
% Req. Toolbox : - * | |||
% * | |||
% Author : Kevin Ernst, Timo Roch * | |||
% * | |||
% Letzte Änderung : 07.01.2024 * | |||
%***************************************************************** | |||
function [Drehwinkel,MotorON] = Steuerung_Pentomino(A0,A1,A2,A3,A4,A5,Taster) | |||
persistent Init % Initialiesierungs Variable | |||
persistent MotorNeutral % Motor in einer Mittigen Stellung | |||
persistent MotorVorne % Motor öffnet Klappe | |||
persistent MotorVerriegelt % Motor verriegelt Klappe | |||
persistent Zustand % Zustand des Programms | |||
persistent SchwelleHall % Schaltschwelle der Hallsensoren | |||
persistent ZeitReturn % Zeit die der Motor vorne bleibt befor er zurück in Neutral fährt => 1000 = 1s | |||
persistent ZeitReturn_C % Zählvariable für ZeitReturn | |||
persistent ZeitMotor % Zeit die der Motor benötigt um zu fahren | |||
persistent ZeitMotor_C % Zählvariable für ZeitMotor | |||
%Initialiesierung | |||
if isempty(Init) | |||
SchwelleHall=650; | |||
ZeitReturn=1000; | |||
ZeitReturn_C=ZeitReturn; | |||
MotorNeutral=129; | |||
MotorVorne=95; | |||
MotorVerriegelt=140; | |||
Zustand=5; | |||
Init = true; | |||
ZeitMotor=500; | |||
ZeitMotor_C=ZeitMotor; | |||
end | |||
% Setze Standardwerte für die Ausgaben | |||
Drehwinkel = MotorVerriegelt; % Standardwert, falls keine Bedingung erfüllt wird | |||
MotorON = 0; % Standardwert: Motor ist aus | |||
if (Init == true) | |||
% true=Alle 6 Hallsensoren in dem Durchlauf erkannt | |||
SechsMalHall = ((A0>=SchwelleHall)&&(A1>=SchwelleHall)&&(A2>=SchwelleHall)&&(A3>=SchwelleHall)&&(A4>=SchwelleHall)&&(A5>=SchwelleHall)); | |||
switch Zustand | |||
case 0 %"Verriegelt" | |||
MotorON = 0; | |||
Drehwinkel = MotorVerriegelt; | |||
if ((SechsMalHall)&&(Taster==1)) | |||
Zustand=1; %"Bewegung von Verriegelt zu Vorne"; | |||
end | |||
case 1 %"Bewegung von Verriegelt zu Vorne" | |||
MotorON = 1; | |||
Drehwinkel = MotorVorne; | |||
if(ZeitMotor_C<=0) | |||
Zustand=2; %"Vorne"; | |||
ZeitMotor_C=ZeitMotor; | |||
else | |||
ZeitMotor_C=ZeitMotor_C-1; | |||
end | |||
case 2 %"Vorne" | |||
MotorON = 0; | |||
Drehwinkel = MotorVorne; | |||
if(ZeitReturn_C<=0) | |||
Zustand=3; %"Bewegung von Vorne zu Neutral"; | |||
ZeitReturn_C=ZeitReturn; | |||
else | |||
ZeitReturn_C=ZeitReturn_C-1; | |||
end | |||
case 3 %"Bewegung von Vorne zu Neutral" | |||
MotorON = 1; | |||
Drehwinkel = MotorNeutral; | |||
if(ZeitMotor_C<=0) | |||
Zustand=4; %"Neutral"; | |||
ZeitMotor_C=ZeitMotor; | |||
else | |||
ZeitMotor_C=ZeitMotor_C-1; | |||
end | |||
case 4 %"Neutral" | |||
MotorON = 0; | |||
Drehwinkel = MotorNeutral; | |||
if ((~SechsMalHall)&&(Taster==0)) | |||
Zustand=5; %"Bewegung von neutral zu Verriegelt"; | |||
end | |||
case 5 %"Bewegung von neutral zu Verriegelt" | |||
MotorON = 1; | |||
Drehwinkel = MotorVerriegelt; | |||
if(ZeitMotor_C<=0) | |||
Zustand=0; %"Verriegelt"; | |||
ZeitMotor_C=ZeitMotor; | |||
else | |||
ZeitMotor_C=ZeitMotor_C-1; | |||
end | |||
end | |||
end | |||
end | |||
function Taster = Entprellroutine(T) | |||
% Definition der Variablen | |||
persistent buttonState; % Speichert den Zustand des Tasters | |||
persistent holdState; % Speichert, ob der Taster gehalten wird | |||
if isempty(buttonState) | |||
buttonState = uint8(0); % Initialisiere mit 0 | |||
end | |||
if isempty(holdState) | |||
holdState = false; % Initialisiere mit false | |||
end | |||
Taster=0; | |||
%Übergabe des Taster Inputs | |||
currentState = T; | |||
% Die vorherigen Zustände in der 8-Bit-Variable speichern | |||
buttonState = bitshift(buttonState, 1) + uint8(currentState); | |||
% Steigende Flanke erkennen (Wechsel von 0 auf 1) | |||
if bitand(buttonState, uint8(3)) == uint8(1) | |||
Taster=1; | |||
holdState = true; % Taster wird als gehalten markiert | |||
end | |||
% Fallende Flanke erkennen (Wechsel von 1 auf 0) | |||
if bitand(buttonState, uint8(3)) == uint8(2) | |||
Taster=0; | |||
holdState = false; % Taster wird nicht mehr gehalten | |||
end | |||
% Erkennen, ob der Taster gehalten wird | |||
if holdState==true | |||
Taster=1; | |||
end | |||
end | |||
</pre> | |||
</div> | |||
Zustand 5 (Bewegung von Neutral zu Verriegelt): | |||
*Motor fährt in die Sperrstellung. | |||
*Wird immer beim Start des Programms aktiviert, unabhängig vom Zustand beim Ausschalten. | |||
*Nach Erreichen der Sperrstellung wechselt das Programm in Zustand 0. | |||
Zustand 0 (Verriegelt): | |||
*Motor bleibt in der Sperrstellung. | |||
*Wird erst verlassen, wenn alle sechs Hallsensoren einen Magneten erkennen und der Taster nicht gedrückt ist. | |||
*Danach wechselt das Programm in Zustand 1. | |||
Zustand 1 (Bewegung von Verriegelt zu Vorne): | |||
*Motor fährt in die vordere Stellung, um die Geheimklappe zu öffnen. | |||
*Nach Erreichen der vorderen Stellung wechselt das Programm in Zustand 2. | |||
Zustand 2 (Vorne): | |||
*Motor bleibt in der vorderen Stellung. | |||
*Nach einer Sekunde erfolgt der Wechsel in Zustand 3. | |||
Zustand 3 (Bewegung von Vorne zu Neutral): | |||
*Motor fährt in die neutrale Stellung. | |||
Zustand 4 (Neutral): | |||
*Programm wartet, bis mindestens ein Spielstein vom Spielbrett entfernt wurde und der Reset-Taster gedrückt wird. | |||
*Danach wechselt das Programm in Zustand 5 und verriegelt die Geheimklappe erneut. | |||
*In der Zeit wird davon ausgegangen, das der Anwender die Klappe geschlossen hat. | |||
*Das Rätsel beginnt wieder im ersten Zustand. | |||
== Komponententest == | |||
<br> | |||
In den Komponententests werden sämtliche Funktionalitäten des Projekts einzeln geprüft, um sicherzustellen, dass jede Komponente ordnungsgemäß funktioniert. Eine detaillierte Dokumentation der einzelnen Komponententests wird erstellt, die folgende Informationen umfasst: | |||
*Die jeweilige Komponente | |||
*Angewandte Testmethoden | |||
*Erwartete Ergebnisse | |||
*Gemessene Ergebnisse | |||
Diese strukturierte Aufzeichnung ermöglicht eine umfassende Überprüfung der Funktionalität jeder Komponente und bildet die Grundlage für eine gründliche Qualitätssicherung des gesamten Projekts. | |||
<br> | |||
<br> | |||
[[Datei:Prototyp-Pentomino.jpg|200px|mini|alternativtext=Test| Abb. 12. Erster Prototyp]] | |||
===3D-Druck=== | |||
<br> | <br> | ||
Erster Prototyp-Druck: | |||
<br> | <br> | ||
Nach der ersten Konstruktion wurde ein Testdruck der konstruierten Komponenten (Spielbrett und Puzzleteile) durchgeführt. Dabei sind zwei Dinge aufgefallen. | |||
# Das Oben und Unten der Puzzleteile muss klar definiert sein, sonst ergeben sich falsche Magnetpositionen. | |||
# Die Teile benötigen Griffe um das Platzieren und entfernen vom Spielbrett zu erleichtern. | |||
Außerdem wurden die Maßtoleranzen leicht angepasst, um den Puzzleteilen auf dem Spielbrett minimal mehr Spiel zu geben. | |||
<br> | <br> | ||
<br> | <br> | ||
<br> | <br> | ||
Zweiter Prototyp-Druck: | |||
<br> | |||
[[Datei:Zweiter_Prototyp.jpg|200px|mini|alternativtext=Test| Abb. 13. Zweiter Prototyp]] | |||
# Die beim ersten Prototypen-Druck erkannten Probleme wurden beseitigt, sodass sich die Puzzleteile leicht auf das Spielbrett legen und wieder entfernen lassen. | |||
# Zusätzlich wurde der Rand des Spielbretts verbreitert, um Platz für Muttern zur Befestigung zu schaffen. | |||
# Erhöhung der unteren und oberen Schichtanzahl auf jeweils 4 Schichten, damit die Magnete nicht mehr durch den Spielstein zu sehen sind. | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
===Hall-Sensoren=== | |||
<br> | |||
Zur Erprobung der Hall-Sensoren wird ein Ausschnitt des Spielbretts mittels 3D-Druck gefertigt. Diese Testversion ermöglicht die präzise Installation und Verkabelung eines einzelnen Sensors. Nach der Montage dient der Ausschnitt als Testplattform: Ein Spielstein mit integriertem Magneten wird auf die Oberfläche platziert, um die Erkennungsfähigkeit des Sensors zu überprüfen. Dabei wird insbesondere getestet, ob der Sensor den Magneten zuverlässig durch zwei Schichten des PLA-Druckmaterials detektieren kann. Diese Methode gewährleistet eine realitätsnahe Simulation der späteren Spielbrettbedingungen und ermöglicht eine genaue Beurteilung der Sensorleistung. | |||
Testergebnis-Schwellwerte: | |||
*Spielstein liegt nicht auf dem Spielbrett : Sensorwert kleiner 650 | |||
*Spielstein liegt auf dem Spielbrett : Sensorwert größer 650 | |||
Die gemessenen Werte können aufgrund der Toleranzen des Systems geringfügige Schwankungen aufweisen. Aus diesem Grund wurden keine festen Werte für den Analog-Digital-Wandler definiert. Stattdessen wurden Schwellwerte festgelegt, die in jedem Fall entweder über- oder unterschritten werden. | |||
<br> | |||
Der durchgeführte Test demonstriert die zuverlässige Erkennung eines magnetischen Spielsteins durch den Hall-Sensor. Der korrekt platzierte Spielstein erzeugt stabile Messwerte zwischen 750 und 850. Selbst bei Bewegungen innerhalb der Toleranzgrenzen bleiben die Werte deutlich über dem definierten Schwellwert von 650, wobei nur geringfügige Schwankungen durch die Bewegung des Spielsteins zu beobachten sind. Bei Entfernung des Spielsteins fällt der Messwert abrupt unter den Schwellwert von 650. Nach der Wiederauflage steigt der Wert unmittelbar wieder auf das ursprüngliche Niveau an, was eine klare Unterscheidung zwischen An- und Abwesenheit des Spielsteins ermöglicht. | |||
Die Messung zeigt eindeutig die technische Eignung des Hall-Sensors zur Spielsteinerkennung. Der deutliche Abstand zwischen den Messwerten und dem Schwellwert gewährleistet eine robuste Erkennung auch bei leichten Positionsschwankungen des Spielsteins. | |||
<br> | |||
<gallery widths="200" heights="200" > | |||
Anschluss_Funktionstest.jpeg| Abb. 14. Anschluss Funktionstest | |||
Spielbrettaufbau Ohne Stein.jpeg | Abb.15. Spielbrettaufbau ohne Stein | |||
Spielbrettaufbau Mit Stein.jpeg | Abb. 16. Spielbrettaufbau mit Stein | |||
Schwellwerte_Hallsensor.png| Abb. 17. Test Hall-Sensor | |||
</gallery> | |||
<br> | |||
== | ===Reset-Taster=== | ||
<br> | |||
Zur Erprobung des Reset-Tasters wird ein Testaufbau mit dem Mikrocontroller erstellt. Diese Testversion ermöglicht die präzise Installation und Verkabelung eines einzelnen Reset-Tasters. Nach der Montage dient der Aufbau als Testplattform: Der Reset-Taster wird an einen Eingang des Mikrocontrollers angeschlossen, während eine LED zur Signalisierung des Reset-Zustands verwendet wird. Zusätzlich muss bei der Implementierung des Tasters der interne Pullup-Widerstand des Arduino aktiviert werden. | |||
<br> | |||
Der Test umfasst folgende Schritte: | |||
#Betätigung des Reset-Tasters für verschiedene Zeitspannen (kurz, mittel, lang). | |||
#Überprüfung der Reaktion des Mikrocontrollers auf die Tasterbetätigung. | |||
#Beobachtung des Taster-Zustandes zur Verifizierung des Reset-Vorgangs. | |||
<br> | |||
Diese Methode gewährleistet eine realitätsnahe Simulation der späteren Einsatzbedingungen und ermöglicht eine genaue Beurteilung der Reset-Taster-Funktion. | |||
<br> | |||
Testergebnis: | |||
*Kurze Betätigung: Kein Reset | |||
*Mittlere Betätigung: Erfolgreicher Reset des Systems | |||
*Lange Betätigung: Erfolgreicher Reset des Systems | |||
<br> | |||
<br> | |||
<gallery widths="200" heights="200"> | |||
Einbau_Taster.jpeg | Abb.18. Einbau Taster | |||
Verkablung_Taster.jpeg | Abb. 19. Verkabelung Taster | |||
ErsterVersuch_Taster.png | Abb. 20. Test einlesen Taster | |||
</gallery> | |||
<br> | |||
<br> | |||
===Motor und Klappe=== | |||
<br> | |||
Zur Erprobung des Servomotors und der Klappe wird der Aufbau mittels 3D-Druck gefertigt. Der Aufbau der Gesamtkonstruktion ermöglicht die präzise Installation und Verkabelung des Servomotors sowie die Montage der Klappe. Nach der Installation dient der Aufbau als Testplattform: Der Servomotor wird an den Mikrocontroller angeschlossen, der die Steuerungssignale sendet. | |||
Der Test umfasst folgende Schritte: | |||
*Kalibrierung des Servomotors für die korrekte Öffnungs- und Schließposition der Klappe. | |||
*Durchführung mehrerer Öffnungs- und Schließzyklen zur Überprüfung der Zuverlässigkeit. | |||
*Überprüfung der Stabilität der Klappe in geöffnetem und geschlossenem Zustand. | |||
<br> | |||
Testergebnis: | |||
Klappe hält in beiden Endpositionen zuverlässig. | |||
Der Test zeigt, dass der Servomotor die Klappe zuverlässig und präzise öffnet und nach dem Schließen verriegelt. Anschließend halten die Magnete in der Klappe diese in Position. | |||
<br> | <br> | ||
<br> | <br> | ||
Beim Motortest ist jedoch aufgefallen, dass der Motor gelegentlich ein unangenehmes Summen von sich gibt. Um dies zu unterbinden, wurde dem Aufbau ein NPN-Bipolartransistor hinzugefügt, um den Motor abzuschalten solange er nicht benötigt wird. Der Arduino nutzt Ausgang 2, um den Transistor zu aktivieren, wodurch das PWM-Signal von Ausgang 3 durchgeleitet wird. Diese Schaltung ermöglicht eine Steuerung der Leistungsabgabe, indem der Transistor als Schalter fungiert und das PWM-Signal nur durchlässt wenn es benötigt wird. So wird eine effiziente Kontrolle des angeschlossenen Motors erreicht. | |||
<br> | <br> | ||
<br> | <br> | ||
<gallery widths="170" heights="170"> | |||
Anschluss_ServoMotor.jpeg | Abb. 21. Anschluss Servomotor | |||
ServoMotorMittig.jpeg | Abb. 22. Servomotor Mittig | |||
ServoMotorAusgefahren.jpeg | Abb. 23. Servomotor ausgefahren | |||
ServoMotorOffendeKlappe.jpeg | Abb. 24. Servomotor öffen der Klappe | |||
ErsterVersuch_ServoMotor.png | Abb. 25. Test Servomotor | |||
</gallery> | |||
<br> | <br> | ||
<br> | <br> | ||
===Gesamtaufbau=== | |||
<br> | |||
Nach den Test der Einzelkomponenten wird das Gesamtsystem zusammengesetzt und ein umfassender Systemtest durchgeführt, der sämtliche Funktionen beinhaktet. In diesem Zusammenhang wird die Anforderungsliste erweitert und die Erfüllung der einzelnen Anforderungen überprüft. Dadurch können sämtliche Funktionalitäten systematisch geprüft und die Ergebnisse objektiv bewertet werden. | |||
Dazu wurde zuerst die Sensoren mit Kabeln für Stromversorgung, Ground und einer Signalleitung verlötet. Anschließend wurden die Sensoren in die unter dem Spielbrett vorgesehenen Vertiefungen geklebt und mit Heißkleber fixiert. Zusätzlich wurden die Verschiedenen Kabel mit zwei Kabelbindern sortiert und anschließend auf den Arduino gesteckt. Dafür werden die Analogen Eingänge 0-5 des Arduino genutzt. Die Steckreihenfolge ist dabei nicht relevant, da lediglich abgefragt wird, ob alle Steine (Magnete) im Spielbrett liegen. Für die Spannungsversorgung wird der 5V Output des Arduino verwendet sowie ein Ground Pin. <br> | |||
Im zweiten Schritt erfolgte der Einbau des Servo-Motors in das Gehäuse sowie dessen elektrische Anbindung an den Arduino. Hierbei wurde der Servo-Motor im vorgesehenen Bereich des Gehäuses platziert. Anschließend wurde die elektrische Verbindung hergestellt, wobei Verbindungskabel zum Einsatz kamen, um den Servo-Motor mit dem Arduino zu verbinden. Ein wichtiger Bestandteil dieser Verbindung war der Einsatz eines NPN-Transistors. Dieser Transistor dient als elektronischer Schalter und ermöglicht das Ein- und Ausschalten des Servo-Motors durch den Arduino. <br> | |||
Im nächsten Arbeitsschritt wurde der Reset-Knopf eingebaut und die Stromversorgung installiert. Der Reset-Knopf wurde zur Sicherung eingeklebt. Eine elektrische Verbindung zwischen dem Knopf und dem digitalen Eingang 4 des Arduino wurde hergestellt. Diese Konfiguration ermöglicht zwei wichtige Funktionen: | |||
#Ein- und Ausschalten des gesamten Spiels | |||
#Neustart des Spiels nach dem Öffnen und Schließen der Klappe | |||
Die Stromversorgung erfolgt über ein 9V Steckernetzteil, das mit einem Ein- und Ausschalter versehen wurde. | |||
<br> | |||
Zur Abschließenden Montage des Projekts wurden folgende Schritte durchgeführt: | |||
#Einsetzen der Klappe in das Gehäuse | |||
#Montage des Arduino im Gehäuse | |||
#Platzierung des Spielbretts | |||
#Fixierung des Spielbretts mit vier Schrauben | |||
Diese finale Montage vervollständigt den Aufbau des Spiels und macht es einsatzbereit. | |||
<gallery widths="200" heights="200"> | |||
Verdrahtung_Spielbrett_HallSensor.jpeg | Abb. 26. Verdrahtung Spielbrett Hall-Sensor | |||
Einbau_Taster.jpeg | Abb. 27. Einbau Taster | |||
Anschluss_ServoMotor.jpeg | Abb. 28. Anschluss Servomotor | |||
</gallery> | |||
== Ergebnis == | == Ergebnis == | ||
<big>Umsetzung der Anforderungen</big> | |||
<br> | |||
Nach dem Abschluss des mechanischen Aufbaus und der Programmierung des Systems wurden alle zu beginn des Projektes festgelegten Anforderungen getestet. | |||
<br> | |||
{| class="wikitable" | |||
|+ style = "text-align: left"| Tabelle 3: Umsetzung der Anforderungen | |||
|- | |||
! Nr. !! Priorisierung !! Anforderung !! Getestet !! Erfüllt !! Bemerkung | |||
|- | |||
|1 || Gering || Das Puzzle muss in einen Schuhkarton passen. || JA || JA || Abmaße kleiner als Abmaße eines Schuhkartons (20x35x15) | |||
|- | |||
|2 || Mittel || Das Rätsel soll für Escape-Room-Einsteiger geeignet sein. || JA || JA || Erfolgreiche Lösungsversuche durch Kommilitonen | |||
|- | |||
|3 || Hoch || Die Lösungszeit soll maximal 5 Minuten betragen. || JA || JA || Erfolgreiche Lösungsversuche durch Kommilitonen | |||
|- | |||
|4 || Hoch || Die Ausgabe erfolgt bei korrekter Lösung als Vierstelliger Zahlencode. || JA || JA || Test des Gesamtsystems durchgeführt / Klappe öffnet automatisch und bietet platz für Code Karte | |||
|- | |||
|5 || Mittel || Automatische Erkennung der richtigen Lösung || JA || JA || Test des Gesamtsystems durchgeführt / Klappe öffnet automatisch | |||
|- | |||
|6 || Mittel || Einzelteile möglichst mit 3D-Druck fertigbar. || JA || JA || Alle selbst Konstruierten Teile sind 3D gedruckt | |||
|- | |||
|7 || Hoch || Der Mikrocontroller muss vom Typ Arduino Uno R3 sein. || JA || JA || Verbaut wurde ein Arduino Uno R3 | |||
|- | |||
|8 || Hoch || Der Ausgabemechanismus soll mit einem Servo-Motor realisiert werden. || JA || JA || Test des Gesamtsystems durchgeführt / Klappe öffnet automatisch durch drehen eines Servo-Motors | |||
|- | |||
|9 || Hoch || Nach dem Spielende soll ein Reset durchgeführt werden können. || JA || JA || Reset-Taster wurde eingebaut und auf Funktion getestet / Reset wird erfolgreich durchgeführt | |||
|- | |||
|10 || Hoch || Die Stromversorgung soll mit einem geeigneten Steckernetzteil für einen Arduino erfolgen. || JA || JA || Verwendung eines 9V Steckernetzteil | |||
|- | |||
|11 || Hoch || Es soll ein An/Aus-Schalter eingebaut werden. || JA || JA || An/Aus-Schalter wurde eingebaut und auf Funktion getestet | |||
|- | |||
|12 || Hoch || Das Hauptprogramm soll kontinuierlich den Systemzustand überprüfen und den Servo-Motor zur Codeausgabe steuern. || JA || JA || Test des Gesamtsystems durchgeführt / Sensoren werden kontinuierlich abgefragt | |||
|- | |||
|13 || Mittel || Es soll eine Initialisierungsroutine für den Systemstart vorgesehen werden. || JA || JA || System startet immer in der gleichen definierten Position | |||
|- | |||
|14 || Hoch || Das Arduino-System soll über Matlab-Simulink-Funktionen gesteuert werden. || JA || JA || Programmierung wurde mit Matlab und Simulink durchgeführt | |||
|- | |||
|15 || Mittel || Das System muss benutzerfreundlich und für Kinder wie Erwachsene geeignet sein. || JA || JA || Erfolgreiche Lösungsversuche durch Kommilitonen und Familie | |||
|- | |||
|16 || Hoch || Es müssen Tipps und Musterlösungen für Spielleiter bereitgestellt werden. || JA || JA || Drei Karten mit Hilfestellungen und eine Musterlösung liegen dem Spiel bei | |||
|- | |||
|18 || Hoch || Es soll nur eine Lösungsmöglichkeit für das Puzzle geben. || JA || JA || Realisiert durch Form des Spielbretts und der Spielsteine | |||
|- | |||
|} | |||
<br> | |||
<br> | |||
<big>Funktionstest des Pentomino-Puzzles</big> | |||
<br> | |||
Spielstart und Puzzlelösung:<br> | |||
#Kippschalter umlegen, um das Pentomino-Puzzle zu aktivieren. | |||
#Alle Spielsteine in das Spielbrett einlegen. | |||
#Puzzle lösen, bis alle Spielsteine korrekt platziert sind. | |||
Automatische Reaktion bei erfolgreicher Lösung:<br> | |||
*Sobald alle Spielsteine korrekt im Spielbrett liegen, aktiviert sich der Servo-Motor. | |||
*Der Motor öffnet die Klappe und fährt anschließend in die mittlere Position zurück. | |||
*Die Klappe öffnet sich. | |||
Zugang zum Code:<br> | |||
*Nach dem Öffnen der Klappe wird eine Karte mit einem vierstelligen Code zugänglich. | |||
*Die Karte kann nun entnommen werden. | |||
Zurücksetzen des Spiels:<br> | |||
#Karte mit dem vierstelligen Code wieder einlegen. | |||
#Klappe manuell schließen. | |||
#Reset-Taster drücken. | |||
*Nach Betätigung des Reset-Tasters fährt der Motor in die Verriegelungsposition. | |||
Vorbereitung für die nächste Runde:<br> | |||
*Spielsteine können nun für eine neue Spielrunde eingelegt werden. | |||
<br> | |||
<br> | |||
<br> | |||
===Projektergebnis=== | |||
<br> | |||
Das mechatronische Pentomino Puzzle wurde erfolgreich als interaktives Escape-Room-Spiel für Einsteiger entwickelt und umgesetzt. Das fertige Projekt besteht aus einem 3D-gedruckten Spielbrett mit integrierten Hall-Sensoren, einem Gehäuse zur Unterbringung der Technik, sechs Pentomino-Teilen mit eingelassenen Magneten und einem Arduino-gesteuerten Mechanismus zur Codeausgabe. <br> | |||
Bei korrekter Platzierung aller Spielsteine öffnet sich automatisch die Servo-Motor gesteuerte Geheimklappe, die einen vierstelligen Zahlencode freigibt. Der Aufbau umfasst einen Arduino Uno R3 Mikrocontroller, einen Servomotor für den Klappmechanismus und einen Reset-Taster zum Zurücksetzen des Spiels. Das Puzzle erfüllt alle definierten Anforderungen, einschließlich der Eignung für Escape-Room-Einsteiger und einer maximalen Lösungszeit von ca. 5 Minuten. | |||
<gallery widths="450" heights="450"> | |||
Beispielbild Gesamtaufbau Pentomino.jpeg | Abb. 29. Fertiges Pentomino-Puzzle | |||
Beispielbild Pentomino2.jpeg | Abb. 30. Fertiges Pentomino-Puzzle | |||
Gesamtaufbau_Konstruktion.PNG | Abb. 31. Gesamtaufbau Konstruktion | |||
</gallery> | |||
<br> | |||
<big>Verbesserungs- und Erweiterungsmöglichkeiten</big> | |||
<br><br> | |||
Verbesserungsmöglichkeiten: | |||
* Automatisches Schließen der Klappe. | |||
* Weitere Lösungen mit anderen Spielsteinen. | |||
** Ermöglicht mehrfaches Spielen. | |||
<br> | |||
Erweiterungsmöglichkeiten: | |||
*Die Schwierigkeitsstufe des Spiels kann beispielsweise durch eine Erhöhung der Spielsteinanzahl angepasst werden. Dabei muss jedoch beachtet werden, dass es weiterhin nur eine mögliche Lösung geben darf. | |||
* Eine weitere Möglichkeit das Spiel zu erweitern sind weitere Spielsteine, die jedoch gar nicht in die Gesamtlösung des Spiels passen. So kann die Schwierigkeit erhöht werden ohne den Gesamtaufbau zu verändern. | |||
== Zusammenfassung == | == Zusammenfassung == | ||
Das Pentomino Puzzle ist ein mechatronisches Escape-Room-Spiel, das im Rahmen des Projektes im Fachpraktikum Mechatronik im Masterstudiengang Business and Systems Engineering entwickelt wurde. Es kombiniert das klassische geometrische Rätsel mit moderner Elektronik und bietet eine einzigartige Spielerfahrung. | |||
<big>Hauptmerkmale:</big> | |||
*Spielprinzip: Die Spieler müssen sechs Pentomino-Teile korrekt auf einem Spielbrett platzieren. | |||
*Technologie: Das Spiel Verwendet Hall-Sensoren, Magnete, einen Arduino-Mikrocontroller und einen Servomotor. | |||
*Mechanismus: Bei korrekter Lösung öffnet sich automatisch eine Geheimklappe. | |||
*Ausgabe: Ein vierstelliger Zahlencode wird freigegeben. | |||
*Zielgruppe: Geeignet für Escape-Room-Einsteiger. | |||
<big>Technische Umsetzung:</big> | |||
*3D-gedrucktes Spielbrett, Gehäuse mit Klappe und Puzzleteile aus PLA | |||
*Integrierte Hall-Sensoren im Spielbrett | |||
*Magnete in den Puzzleteilen | |||
*Arduino Uno R3 zur Steuerung | |||
*Servomotor für den Klappmechanismus | |||
*Programmierung mittels MATLAB und Simulink | |||
<big>Entwicklungsprozess:</big> | |||
*Sorgfältige Planung und Anforderungsanalyse | |||
*Umsetzung der Hardware und Software | |||
*Umfangreiche Komponenten- und Anforderungstests | |||
*Aufbau und Test des Gesamtsystems | |||
<big>Ergebnis:</big><br> | |||
Das fertige Projekt erfüllt alle definierten Anforderungen und bietet ein funktionierendes, interaktives Puzzle-Erlebnis für Escape-Room-Einsteiger. Es demonstriert erfolgreich die Anwendung mechatronischer Prinzipien in einem spielerischen Kontext. | |||
== Lessons Learned == | |||
'''Strategische Planung''' | |||
*Gründliche Planung erleichtert Projektablauf und erhöht die Chance auf ein erfolgreiches Projekt. | |||
** Hindernisse und Probleme können frühzeitig erkannt werden. | |||
'''Effizientes Ressourcenmanagement''' | |||
*Klare Aufgabenteilung und realistisches Zeitmanagement fördern Verantwortlichkeit und das vorankommen des Projektes. | |||
'''Fertigungstoleranzen berücksichtigen''' | |||
*Frühzeitige Einbeziehung von Toleranzen, besonders beim 3D-Druck, zur Minimierung von Nacharbeiten. | |||
'''Kommunikation und Agilität''' | |||
*Regelmäßiger Austausch im Team und flexible Anpassung an Änderungen. | |||
'''Qualitätssicherung''' | |||
*Tests und kontinuierliche Überprüfungen zur Gewährleistung der Produktqualität. | |||
** Besonders der Mehrfache 3D-Druck als Prototypen. | |||
'''Dokumentation''' | |||
*Sorgfältige Aufzeichnung von Prozessen und Entscheidungen für den Wiki Artikel und die Projektmesse. | |||
** Fördert die korrekte und ausführliche Dokumentation von Arbeitsschritten. | |||
== Projektunterlagen == | == Projektunterlagen == | ||
=== Projektplan === | === Projektplan === | ||
Der Projektplan zeigt den zeitlichen Ablauf des Projekt von Ende September 2024 bis Mitte Januar 2025. Die Abbildung zeigt ein Gantt-Diagramm, dass die Einzelnen Aufgaben als Balken darstellt. Es sind Start- und Endzeit, der Bearbeitung und der Fortschritt der jeweiligen Aufgabe dargestellt. | |||
[[Datei:Projektplan_Pentomino_Puzzle.png|800px|mini|alternativtext=Test| Abb. 32. Projektplan Pentomino Puzzle]] | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
<br> | |||
=== Projektdurchführung === | === Projektdurchführung === | ||
Die Projektdurchführung orientiert sich dabei an dem aufgestellten Projektplan. Es wurde darauf geachtet, die terminlichen Vorgaben einzuhalten. Die Durchführung an sich hat, abgesehen von krankheits- und feiertagsbedingten Ausfällen, zwischenzeitlich zu einer Verzögerung von ein Paar Tagen geführt. Dieser Verzug konnte jedoch durch intensive Arbeitstage ausgeglichen werden. | |||
== YouTube Video == | == YouTube Video == | ||
Das folgende Video bietet einen Einblick in den Aufbau und die Funktionsweise eines Escape Games, das im Rahmen des Moduls Angewandte Mechatronik im Masterstudiengang Business and Systems Engineering entwickelt wurde. Das mechatronische Pentomino Puzzle stellt eine Weiterentwicklung des klassischen geometrischen Rätsels dar. Durch den Einsatz von Magneten, Hall-Sensoren und einem Arduino-Mikrocontroller wird das traditionelle Spiel in ein elektronisches Puzzle für ein Escape Game verwandelt. Die Herausforderung besteht darin, 6 Pentomino-Teile korrekt in ein Spielbrett einzulegen, wobei die Spieler ihr räumliches Denkvermögen und ihre logische Kombinationsgabe unter Beweis stellen müssen. | |||
{{#ev:youtube|https://youtu.be/KevREBAULAc | 800 | | Pentomino Puzzle |frame}} | |||
== Weblinks == | == Weblinks == | ||
Dieses ZIP-Archiv enthält alle relevanten CAD- und Programmier-Dateien für das Projekt. Die Dateien können verwendet werden, um die Konstruktionen und Modelle in einer CAD-Software zu öffnen und weiter zu bearbeiten. Bitte stellen Sie sicher, dass Sie über eine geeignete Software verfügen, um die Dateien zu extrahieren und anzuzeigen. | |||
Konstruktion: [[:Datei: Konstruktion_Pentomino_Puzzle.zip |Konstruktionsdateien Pentomino Puzzle]] | |||
<br> | |||
Projektplanung: [[:Datei: Projektplanung_Pentomino_Puzzle.zip |Projektplanung Pentomino Puzzle]] | |||
<br> | |||
Projektmesse: [[:Datei: Projektmesse_Pentomino_Puzzle.zip |Projektmesse Pentomino Puzzle]] | |||
<br> | |||
Bilder Wiki-Artikel: [[:Datei: Bilder-Wiki-Artikel_Pentomino_Puzzle.zip |Bilder Wiki-Artikel Pentomino Puzzle]] | |||
== Literatur == | == Literatur == | ||
Aktuelle Version vom 16. Januar 2025, 22:17 Uhr
→ zurück zur Übersicht: WS 24/25: Escape Game
| Autoren: | Kevin Ernst und Timo Roch |
| Betreuer: | Prof. Göbel |
Autoren: Timo Roch und Kevin Ernst

Einleitung
Ein Pentomino ist eine geometrische Figur, die aus fünf gleich großen Quadraten besteht, wobei diese Quadrate entlang ihrer Kanten miteinander verbunden sind. Der Begriff "Pentomino" bezieht sich sowohl auf die einzelnen Figuren als auch auf das darauf basierendes Geduldsspiel, bei dem ein Spieler eine bestimmte Anzahl an Pentomino Spielsteine in einem Spielbrett so anordnen muss, dass alle Spielsteine im Spielbrett platz finden.
Das mechatronische Pentomino Puzzle stellt eine Weiterentwicklung des klassischen geometrischen Rätsels dar. Durch den Einsatz von Magneten, Hall-Sensoren und einem Arduino-Mikrocontroller wird das traditionelle Spiel in ein elektronisches Puzzle für ein Escape Game verwandelt. Diese Zusammenführung von Mechanik und Elektronik schafft eine einzigartige Spielerfahrung, die sowohl die räumliche Vorstellungskraft als auch das logische Denken der Teilnehmer herausfordert. Damit ist das Pentomino Puzzle ideal für die Umsetzung des Projektes im Fachpraktikum Mechatronik im Masterstudiengang Business and Systems Engineering. WS 24/25: Escape Game
Escape Rooms sind teambasierte Spiele, bei denen Spieler Rätsel lösen, Experimente durchführen und Aufgaben erfüllen. Wird das Puzzle richtig gelöst, wird ein vierstelliger Zahlencode ausgegeben, um das nächste Escape Game spielen zu können.
Anforderungen
Anforderungen an das Escape Game:
- Jedes Rätsel muss von der Größe her in einen Schuhkarton passen, damit es zu einem Escape-Mobil kombiniert werden kann.
- Jedes Rätselfach wird über ein Schloss mit Schlüssel oder Zahlen geöffnet.
- Ende jedes Rätsels ist ein Schlüssel, 3-4 stellige Zahlenkombination oder Umsetzungstabelle (z. B. Farben/Noten/... in Zahlen).
- Ausnahme können kombinierte Rätsel bieten. Zwei Teams überlegen sich eine abweichende Schnittstelle.
- Für dese Rätsel muss ein Schwierigkeitscode angegeben werden (Einsteiger, Fortgeschrittene, Profi). Das Einsteiger Level ist für Rätsel-Freunde, die noch keine oder wenige Erfahrungen mit Escape-SpieleEscape-Spiele haben. Das Level Fortgeschrittene wird für Rätsel-Fans empfohlen, die schon mehrere Escape Spiele gespielt haben und das Level Profis geht an die Rätsel-Meister.
- Jedes Rätsel sollte in ca. 5 Minuten lösbar sein.
- Stellen Sie für jedes Rätsel für die Spielleiter*in Tipps und Musterlösung bereit.
- Zur Lösung der Haupträtsel darf, sofern der Bedarf bestehen sollte, in den entsprechend bereit gestellten Fachbüchern nachgelesen werden. Eine Internetrecherche (durch Handys, Tablets, Laptops) ist nicht erlaubt, das heißt digidetox = digital detoxification (digitale Entgiftung) spielt daher auch eine Rolle.
| Nr. | Priorisierung | Anforderung | Bemerkung | Erstellt |
|---|---|---|---|---|
| 1 | Gering | Das Puzzle muss in einen Schuhkarton passen. | 03.10.2024 | |
| 2 | Mittel | Das Rätsel soll für Escape-Room-Einsteiger geeignet sein. | Schwierigkeitslevel: Einsteiger | 03.10.2024 |
| 3 | Hoch | Die Lösungszeit soll maximal 5 Minuten betragen. | Hinweise nach 3 und 4 Minuten | 03.10.2024 |
| 4 | Hoch | Die Ausgabe erfolgt bei korrekter Lösung als Vierstelliger Zahlencode. | 03.10.2024 | |
| 5 | Mittel | Automatische Erkennung der richtigen Lösung | 03.10.2024 | |
| 6 | Mittel | Einzelteile möglichst mit 3D-Druck fertigbar. | 04.10.2024 | |
| 7 | Hoch | Der Mikrocontroller muss vom Typ Arduino Uno R3 sein. | 04.10.2024 | |
| 8 | Hoch | Der Ausgabemechanismus soll mit einem Servo-Motor realisiert werden. | 03.10.2024 | |
| 9 | Hoch | Nach dem Spielende soll ein Reset durchgefürt werden können. | Anschließend kann erneut gespielt werden | 03.10.2024 |
| 10 | Hoch | Die Stromversorgung soll mit einem Steckernetzteil geeignet für einen Arduino erfolgen. | 03.10.2024 | |
| 11 | Hoch | Es soll ein An/Aus-Schalter eingebaut werden. | 03.10.2024 | |
| 12 | Hoch | Das Hauptprogramm soll kontinuierlich den Systemzustand überprüfen und den Servo-Motor zur Codeausgabe steuern. | 03.10.2024 | |
| 13 | Mittel | Es soll eine Initialisierungsroutine für den Systemstart vorgesehen werden. | 03.10.2024 | |
| 14 | Hoch | Das Arduino-System soll über Matlab-Simulink-Funktionen gesteuert werden. | 03.10.2024 | |
| 15 | Mittel | Das System muss benutzerfreundlich und für Kinder wie Erwachsene geeignet sein. | 03.10.2024 | |
| 16 | Hoch | Es müssen Tipps und Musterlösungen für Spielleiter bereitgestellt werden. | 03.10.2024 | |
| 18 | Hoch | Es soll nur eine Lösungsmöglichkeit für das Puzzle geben. | z.B. durch Spezielle Form von Spielbrett und Spielsteinen | 04.10.2024 |
Funktionaler Systementwurf/Technischer Systementwurf

Aus den Anforderungen wurde im nächsten Schritt eine erste Spielidee entworfen, die alle Anforderungen erfüllt.
Der funktionale Systementwurf aus Abbildung 2 sieht ein Spielbrett vor, in das Hall-Sensoren eingebettet sind. Die Pentomino-Teile werden mit Magneten ausgestattet, deren Position für jedes Teil einzigartig ist. Ein Arduino Uno verarbeitet die Signale der Hall-Sensoren und steuert ein Servomotor so an, dass die Ausgabe des vierstelligen Codes erfolgt.
Bei der technischen Konzeption spielt die Gestaltung des Spielbretts und der Spielsteine eine entscheidende Rolle. Die besondere Form dieser Elemente ist darauf ausgerichtet, dass für das Pentomino-Rätsel nur eine einzige korrekte Lösung existiert. Diese Eindeutigkeit ist von besonderer Wichtigkeit, um zu gewährleisten, dass die Magnete immer genau an den vorgesehenen Positionen platziert werden. Zur Erstellung des Spielbrettes und der Spielsteine wurde ein Online-Tool verwendet. Dieses kann von folgender Website[1] heruntergeladen werden und zur Erstellung von Pentomino-Puzzeln verwendet werden.
Durch diesen Ansatz wird nicht nur die Funktionalität des Spiels sichergestellt, sondern auch die Herausforderung für den Spieler auf ein gut lösbares Niveau gebracht.
Technischer Aufbau:
- Spielbrett mit integrierten Hall-Sensoren
- Pentomino-Teile mit eingebetteten Magneten
- Arduino Uno R3-Mikrocontroller zur Signalverarbeitung
- Mechanische Ausgabe des vierstelligen Codes
- Stromversorgung über Stromkabel
Technischer Systementwurf:

Der in der Abbildung 3 dargestellte technische Systementwurf zeigt die Architektur des Arduino-basierten Pentomino Puzzles.
Eingabekomponenten
- Hall-Sensoren: Insgesamt sechs Hall-Sensoren (A0 bis A5), die an verschiedenen Analogeingängen des Arduino angeschlossen sind
- Reset Taster: Angeschlossen am digitalen Eingang DI des Arduino
- Spannungsquelle: Verbunden mit dem Arduino zur Stromversorgung
Ausgabekomponenten
- Elektromotor: Angesteuert über den PWM3-Ausgang des Arduino
Signalwege
- Analoge Eingänge: A0 bis A5 für die Hall-Sensoren
- Digitaler Eingang: DI für den Reset-Taster
- PWM-Ausgang: PWM3 zur Motorsteuerung
- Digital Output 4: NPN-Transistor zur Motorabschaltung
- Stromversorgung: Separate Spannungsquelle zur Systemversorgung
Komponentenspezifikation
| Nr. | Anz. | Beschreibung |
|---|---|---|
| 1 | 6 | Pentomino-Teile: 3D-gedruckt mit eingelassenen Magneten [1] |
| 2 | 6 | Hall-Sensoren: TLE 4905L Hallsensor, digital, uni-/bipolar, 3,8 - 24 V [2] |
| 3 | 1 | Gehäuse 3D-Druck |
| 4 | 1 | Mikrocontroller: Arduino Uno R3 [3] |
| 5 | 1 | DEBO KABELSET8 Entwicklerboards - Steckbrückenkabel, 20cm, 3x 20 Kabel [4] |
| 6 | 1 | Stromversorgung: Steckernetzteil 9V für ARD Mega [5] |
| 7 | 1 | Taster TRU COMPONENTS 701280 GQ 16F-S Vandalismusgeschützter Drucktaster 48 V/DC 2 A 1 x Aus/(Ein) tastend IP65 [6] |
| 8 | 1 | Servo-Motor: JAMARA 033212 Servo High End Micro Analog [7] |
| 9 | 1 | An/Aus-Schalter TRU COMPONENTS 700185 Wippschalter R13-112A B/B 0-I 250 V/AC 6 A 1 x Aus/Ein rastend [8] |
| 10 | 1 | Diotec Transistor (BJT) - diskret BC548C TO-92 Anzahl Kanäle 1 NPN [9] |
Umsetzung (HW/SW)
Hardware
Konstruktion
Das Spielbrett, die Puzzleteile und das Gehäuse wurden in SolidWorks konstruiert. SolidWorks ermöglichte eine einfache Modellierung aller Komponenten unter Berücksichtigung der spezifischen Anforderungen des Spiels. Nach Abschluss der Konstruktion wurden die Modelle im STL-Dateiformat gespeichert, um für den 3D-Druck nutzbar zu sein. Die besondere Herausforderung bei der Konstruktion bestand in der Geheimklappe selbst. Diese sollte separat gedruckt und später in die Geheimbox eingesetzt werden können. Dafür wurde einer der beiden Stifte, um die sich die Klappe später drehen soll, als Federmechanismus gestaltet. Dieser Stift kann eingedrückt werden, um die Klappe in die Geheimbox einzusetzen.
Eine weitere Herausforderung stellte der Schließmechanismus der Klappe dar. Dieser wurde so konstruiert, dass ein Servomotor die Klappe sowohl öffnen als auch sicher verschließen kann. Hierbei kann ein bewegliches Schloss beim Schließen der Klappe über die Sperrstellung des Servomotors hinwegdrehen. In die entgegengesetzte Richtung lässt sich das Schloss jedoch nicht zurückdrücken, es sei denn, der Motor bewegt es aktiv nach vorne. Nach dem ersten Testdruck stellte sich heraus, dass das Schloss zu klein und zu leicht war, um die innere Reibung zu überwinden. Dadurch drehte es sich nicht zuverlässig. Um dieses Problem zu lösen, wurde am Ende des Schlosses ein kleiner Metallstift eingesetzt, der dafür sorgt, dass sich das Schloss nun immer vertikal ausrichtet.
-
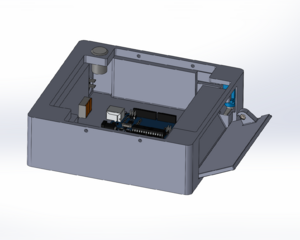 Abb. 4. Baugruppe Pentomino Puzzle
Abb. 4. Baugruppe Pentomino Puzzle -
 Abb. 5. Verschlussmechanismus
Abb. 5. Verschlussmechanismus -
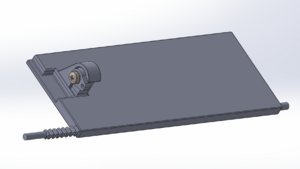 Abb. 6. Feder und Klappe
Abb. 6. Feder und Klappe -
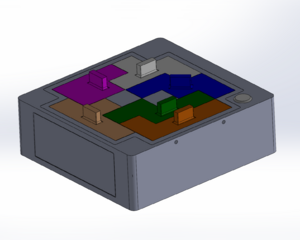 Abb. 7. Gesamtaufbau Pentomino-Puzzle
Abb. 7. Gesamtaufbau Pentomino-Puzzle




Vorbereitung für den 3D-Druck
Die erstellten STL-Dateien wurden anschließend in den Bambulab-Slicer importiert. Dieser spezielle Slicer ist darauf ausgelegt, 3D-Modelle für den Druck mit Bambulab-Druckern vorzubereiten, indem er sie in dünne Schichten zerlegt und den Druckpfad für den 3D-Drucker generiert.
Druckeinstellungen und Materialwahl
Im Bambulab-Slicer wurden die spezifischen Druckeigenschaften sorgfältig eingestellt. Diese Einstellungen umfassen Parameter wie:
- Schichthöhe: 0,1 mm für Spielbrett sonst alle Komponenten 0,2 mm
- Druckgeschwindigkeit: Abhängig von Drucker und Material --> Standard für PLA sollte bevorzugt werden
- Füllgrad: 15-20 %
- Struktur der Füllung: Einfache Linien (Monotonisch)
- Temperatur für Druckbett und Düse: Abhängig von Material (Für PLA ca.: Druckbett 40 Düse 220 Grad)
Als Druckmaterial wurde PLA (Polylactid) von Bambulab gewählt, ein biologisch abbaubarer Kunststoff, der sich durch gute Druckeigenschaften und eine glatte Oberfläche auszeichnet.
Druckprozess mit Magnetintegration
Der Druckvorgang selbst war besonders interessant, da er die Integration von Magneten in die Puzzleteile und der Klappe beinhaltete. Dieser Prozess lief wie folgt ab:
- Start des Druckvorgangs mit den vorbereiteten Einstellungen.
- Pausieren des Drucks in der spezifischen Ebene, in der die Magnete platziert werden sollten.
- Manuelles Einsetzen der Magnete in die vorgesehenen Aussparungen.
- Fortsetzen des Druckvorgangs, wobei die nachfolgenden Schichten die Magnete fest umschlossen und integrierten.
Diese Methode ermöglichte eine nahtlose Integration der Magnete in die Puzzleteile, ohne dass nachträgliche Materialbearbeitungen erforderlich waren.
Funktionsweise von Hall-Sensoren
Ein Hall-Sensor besteht aus einem dünnen Halbleiterplättchen, durch das ein elektrischer Strom fließt. Wenn ein Magnetfeld senkrecht auf dieses Plättchen einwirkt, werden die Ladungsträger im Halbleiter durch die Lorentzkraft abgelenkt. Diese Ablenkung führt zur Entstehung einer elektrischen Spannung quer zur Stromrichtung, der sogenannten Hall-Spannung.
Die Hall-Spannung ist proportional zur Stärke des einwirkenden Magnetfeldes. Moderne Hall-Sensoren integrieren zusätzliche Elektronik auf dem Chip, um diese Spannung zu verstärken und in ein verwertbares Ausgangssignal umzuwandeln. Je nach Anwendung kann dieses Signal analog oder digital sein:
Analoge Hall-Sensoren:
- Liefern ein kontinuierliches Spannungssignal, das proportional zur Magnetfeldstärke ist.
Digitale Hall-Sensoren:
- Vergleichen die gemessene Magnetfeldstärke mit einem Schwellwert und schalten ihren Ausgang entsprechend um.
Für den Aufbau wurden analoge Hall-Sensoren vom Typ 49E verwendet. Diese liefern ein kontinuierliches Spannungssignal, das proportional zur Magnetfeldstärke ist
Schaltplan / Verdrahtungsplan
Der Schaltplan zeigt eine elektronische Schaltung mit folgenden Hauptkomponenten: Sensoren und Eingänge
- 6 Hall-Effekt-Sensoren, jeweils mit 3 Pins ausgestattet
- Ein Taster als Eingabeelement für den Reset
Zentrale Steuerung
- Arduino Uno Mikrocontroller mit verschiedenen Ein- und Ausgängen
- Stromversorgung der Einzelkomponenten vom Arduino über 3,3V und 5V Anschlüsse
- GND (Ground) vom Arduino, Verbindung für die Masseleitung
Ausgänge
- Digital Output 3 (PWM) zur Steuerung des Servo-Motor mit Pulsteuerung
- Ein BC548C Transistor als Schaltelement, zur Motorabschaltung
Verkabelung
- Die Verkabelung ist farblich kodiert:
- Rote Leitungen für die Stromversorgung
- Grüne und Gelbe Leitungen für Signalleitungen
Die Hall-Effekt-Sensoren sind parallel geschaltet und werden zur Positionserkennung der Magnete in den Spielsteinen verwendet. Der Servo-Motor kann über den Mikrocontroller präzise angesteuert werden, während der Transistor BC548C als Schaltverstärker und zum Abschalten dient. Der Taster fungiert als Reset-Knopf.
-
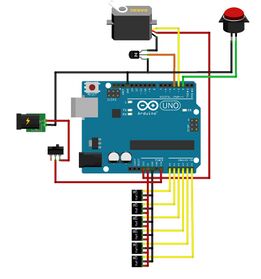 Abb. 8. Verdrahtungsplan
Abb. 8. Verdrahtungsplan -
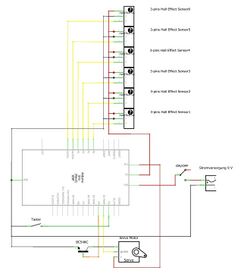 Abb. 9. Schaltplan
Abb. 9. Schaltplan


Software
Software-Planung Für die Software-Planung wurden zunächst die grundlegenden Anforderungen durch Brainstorming definiert.
- Erkennung von 6 Magneten durch Hall-Sensoren
- Steuerung einer Geheimklappe (öffnen/schließen)
- Steuerung eines Servomotors (öffnen/verriegeln)
- Implementierung eines Reset-Tasters (Zurücksetzten das Spiels)
- Kontinuierliche Überprüfung des Systemzustands
- Motor benötigt Zeit zum Auf- und Zufahren
Anschließend erfolgte Festlegung möglicher Zustände die das Programm abdecken muss.
- Spiel eingeschaltet ⇒ Klappe verriegeln
- Klappe verriegelt und Reset Taster Gedrückt ⇒ Keine Reaktion des Systems
- Spielsteine eingelegt ⇒ Klappe öffnen
- Spielsteine eingelegt und Reset-Taster gedrückt ⇒ Keine Reaktion des Systems
- Reset-Taster gedrückt und Spielsteine entfernt ⇒ Klappe verriegeln
Programmablaufplan

Der Programmablaufplan für das Pentomino Puzzle läuft wie folgt ab:
Hauptablauf
- Start des Programms
- Initialisierung der Komponenten
- Übergang in die Main Loop
Prüfungsphase
- Geheimklappe wird verriegelt
- Kontinuierliche Überprüfung der 6 Magnete durch Hall-Sensoren
- Bei erfolgreicher Erkennung aller Magnete:
- Geheimklappe wird geöffnet
- Nach kurzer Zeit fährt der Motor in die Neutralstellung
Wartephase
- Eintritt in Warte-Loop
- Überprüfung ob:
- Spielsteine entfernt wurden
- und Reset-Taster gedrückt wurde
- Falls nicht erfüllt: Zurück zum Warte Loop
- Bei Erfüllung: Rückkehr zur Main Loop
Modellbasierte Programmierung

Das Programm für den Arduino wurde mithilfe von MATLAB und Simulink entwickelt. Um einen Arduino mit MATLAB oder Simulink zu programmieren, müssen zunächst die entsprechenden Add-Ons installiert werden. Eine Anleitung hierzu finden Sie hier[2].
Zu Beginn wurde ein neues Simulink-Modell erstellt und, wie bei allen MATLAB/Simulink-Modellen, die Modellparameter angepasst. Eine feste Schrittweite von 0,001 Sekunden wurde gewählt, sodass das erzeugte Programm einmal pro Millisekunde ausgeführt wird.
Im nächsten Schritt wurden die Ein- und Ausgänge des Arduino aus der Simulink-Bibliothek als vorgefertigte Blöcke in den Programmierbereich gezogen:
- Hallsensoren: Analoge Eingänge A0 bis A5.
- Taster: Digitaler Eingang mit auf „Pullup“ eingestelltem PinMode.
- Servomotor-Steuerung:
- Ein digitaler Ausgang steuert die Versorgungsspannung des Motors über einen Bipolartransistor.
- Ein Arduino-Block überträgt den Drehwinkel an den Servomotor über den PWM-Ausgang 3.
Abschließend wurden alle Bausteine so konfiguriert, dass ihre Sample-Time auf „Inf“ gesetzt wurde. Dies stellt sicher, dass sie mit der definierten Schrittweite von 0,001 Sekunden abgefragt werden können.
Für den eigentlichen Programmablauf wurden MATLAB-Funktionen verwendet. In der ersten Funktion wird der vom Taster eingelesene Zustand durch einen Bit-Schiebealgorithmus entprellt. Dies bedeutet, dass auch bei schnellen Änderungen des Tasterzustands in kurzen Abständen der endgültige Zustand stabilisiert wird, sodass der Funktion "Steuerung_Pentomino" ein definierter Zustand übergeben wird.
In der Funktion „Steuerung_Pentomino“ werden zunächst Variablen initialisiert. Beispielsweise werden die einzelnen Motorpositionen und die dazugehörigen Drehwinkel definiert. Das Programm ist so aufgebaut, dass es für jeden Zustand, den der Motor einnehmen kann, sowie für die dazugehörigen Bewegungen zwischen den Zuständen jeweils eine separate Case-Anweisung gibt. Dadurch wird sichergestellt, dass bei jedem Funktionsaufruf genau eine der Cases erfüllt ist. So wird verhindert, dass das Spiel gleichzeitig in mehreren Zuständen sein könnte.
%*************************************************************** *
% Hochschule Hamm-Lippstadt *
%*************************************************************** *
% Modul : *
% *
% Datum : 07.01.2024 *
% *
% Funktion : Ansteuerung der Motoren einer Geheimbox *
% *
% Implementation : MATLAB 2024b *
% *
% Req. Toolbox : - *
% *
% Author : Kevin Ernst, Timo Roch *
% *
% Letzte Änderung : 07.01.2024 *
%*****************************************************************
function [Drehwinkel,MotorON] = Steuerung_Pentomino(A0,A1,A2,A3,A4,A5,Taster)
persistent Init % Initialiesierungs Variable
persistent MotorNeutral % Motor in einer Mittigen Stellung
persistent MotorVorne % Motor öffnet Klappe
persistent MotorVerriegelt % Motor verriegelt Klappe
persistent Zustand % Zustand des Programms
persistent SchwelleHall % Schaltschwelle der Hallsensoren
persistent ZeitReturn % Zeit die der Motor vorne bleibt befor er zurück in Neutral fährt => 1000 = 1s
persistent ZeitReturn_C % Zählvariable für ZeitReturn
persistent ZeitMotor % Zeit die der Motor benötigt um zu fahren
persistent ZeitMotor_C % Zählvariable für ZeitMotor
%Initialiesierung
if isempty(Init)
SchwelleHall=650;
ZeitReturn=1000;
ZeitReturn_C=ZeitReturn;
MotorNeutral=129;
MotorVorne=95;
MotorVerriegelt=140;
Zustand=5;
Init = true;
ZeitMotor=500;
ZeitMotor_C=ZeitMotor;
end
% Setze Standardwerte für die Ausgaben
Drehwinkel = MotorVerriegelt; % Standardwert, falls keine Bedingung erfüllt wird
MotorON = 0; % Standardwert: Motor ist aus
if (Init == true)
% true=Alle 6 Hallsensoren in dem Durchlauf erkannt
SechsMalHall = ((A0>=SchwelleHall)&&(A1>=SchwelleHall)&&(A2>=SchwelleHall)&&(A3>=SchwelleHall)&&(A4>=SchwelleHall)&&(A5>=SchwelleHall));
switch Zustand
case 0 %"Verriegelt"
MotorON = 0;
Drehwinkel = MotorVerriegelt;
if ((SechsMalHall)&&(Taster==1))
Zustand=1; %"Bewegung von Verriegelt zu Vorne";
end
case 1 %"Bewegung von Verriegelt zu Vorne"
MotorON = 1;
Drehwinkel = MotorVorne;
if(ZeitMotor_C<=0)
Zustand=2; %"Vorne";
ZeitMotor_C=ZeitMotor;
else
ZeitMotor_C=ZeitMotor_C-1;
end
case 2 %"Vorne"
MotorON = 0;
Drehwinkel = MotorVorne;
if(ZeitReturn_C<=0)
Zustand=3; %"Bewegung von Vorne zu Neutral";
ZeitReturn_C=ZeitReturn;
else
ZeitReturn_C=ZeitReturn_C-1;
end
case 3 %"Bewegung von Vorne zu Neutral"
MotorON = 1;
Drehwinkel = MotorNeutral;
if(ZeitMotor_C<=0)
Zustand=4; %"Neutral";
ZeitMotor_C=ZeitMotor;
else
ZeitMotor_C=ZeitMotor_C-1;
end
case 4 %"Neutral"
MotorON = 0;
Drehwinkel = MotorNeutral;
if ((~SechsMalHall)&&(Taster==0))
Zustand=5; %"Bewegung von neutral zu Verriegelt";
end
case 5 %"Bewegung von neutral zu Verriegelt"
MotorON = 1;
Drehwinkel = MotorVerriegelt;
if(ZeitMotor_C<=0)
Zustand=0; %"Verriegelt";
ZeitMotor_C=ZeitMotor;
else
ZeitMotor_C=ZeitMotor_C-1;
end
end
end
end
function Taster = Entprellroutine(T)
% Definition der Variablen
persistent buttonState; % Speichert den Zustand des Tasters
persistent holdState; % Speichert, ob der Taster gehalten wird
if isempty(buttonState)
buttonState = uint8(0); % Initialisiere mit 0
end
if isempty(holdState)
holdState = false; % Initialisiere mit false
end
Taster=0;
%Übergabe des Taster Inputs
currentState = T;
% Die vorherigen Zustände in der 8-Bit-Variable speichern
buttonState = bitshift(buttonState, 1) + uint8(currentState);
% Steigende Flanke erkennen (Wechsel von 0 auf 1)
if bitand(buttonState, uint8(3)) == uint8(1)
Taster=1;
holdState = true; % Taster wird als gehalten markiert
end
% Fallende Flanke erkennen (Wechsel von 1 auf 0)
if bitand(buttonState, uint8(3)) == uint8(2)
Taster=0;
holdState = false; % Taster wird nicht mehr gehalten
end
% Erkennen, ob der Taster gehalten wird
if holdState==true
Taster=1;
end
end
Zustand 5 (Bewegung von Neutral zu Verriegelt):
- Motor fährt in die Sperrstellung.
- Wird immer beim Start des Programms aktiviert, unabhängig vom Zustand beim Ausschalten.
- Nach Erreichen der Sperrstellung wechselt das Programm in Zustand 0.
Zustand 0 (Verriegelt):
- Motor bleibt in der Sperrstellung.
- Wird erst verlassen, wenn alle sechs Hallsensoren einen Magneten erkennen und der Taster nicht gedrückt ist.
- Danach wechselt das Programm in Zustand 1.
Zustand 1 (Bewegung von Verriegelt zu Vorne):
- Motor fährt in die vordere Stellung, um die Geheimklappe zu öffnen.
- Nach Erreichen der vorderen Stellung wechselt das Programm in Zustand 2.
Zustand 2 (Vorne):
- Motor bleibt in der vorderen Stellung.
- Nach einer Sekunde erfolgt der Wechsel in Zustand 3.
Zustand 3 (Bewegung von Vorne zu Neutral):
- Motor fährt in die neutrale Stellung.
Zustand 4 (Neutral):
- Programm wartet, bis mindestens ein Spielstein vom Spielbrett entfernt wurde und der Reset-Taster gedrückt wird.
- Danach wechselt das Programm in Zustand 5 und verriegelt die Geheimklappe erneut.
- In der Zeit wird davon ausgegangen, das der Anwender die Klappe geschlossen hat.
- Das Rätsel beginnt wieder im ersten Zustand.
Komponententest
In den Komponententests werden sämtliche Funktionalitäten des Projekts einzeln geprüft, um sicherzustellen, dass jede Komponente ordnungsgemäß funktioniert. Eine detaillierte Dokumentation der einzelnen Komponententests wird erstellt, die folgende Informationen umfasst:
- Die jeweilige Komponente
- Angewandte Testmethoden
- Erwartete Ergebnisse
- Gemessene Ergebnisse
Diese strukturierte Aufzeichnung ermöglicht eine umfassende Überprüfung der Funktionalität jeder Komponente und bildet die Grundlage für eine gründliche Qualitätssicherung des gesamten Projekts.

3D-Druck
Erster Prototyp-Druck:
Nach der ersten Konstruktion wurde ein Testdruck der konstruierten Komponenten (Spielbrett und Puzzleteile) durchgeführt. Dabei sind zwei Dinge aufgefallen.
- Das Oben und Unten der Puzzleteile muss klar definiert sein, sonst ergeben sich falsche Magnetpositionen.
- Die Teile benötigen Griffe um das Platzieren und entfernen vom Spielbrett zu erleichtern.
Außerdem wurden die Maßtoleranzen leicht angepasst, um den Puzzleteilen auf dem Spielbrett minimal mehr Spiel zu geben.
Zweiter Prototyp-Druck:

- Die beim ersten Prototypen-Druck erkannten Probleme wurden beseitigt, sodass sich die Puzzleteile leicht auf das Spielbrett legen und wieder entfernen lassen.
- Zusätzlich wurde der Rand des Spielbretts verbreitert, um Platz für Muttern zur Befestigung zu schaffen.
- Erhöhung der unteren und oberen Schichtanzahl auf jeweils 4 Schichten, damit die Magnete nicht mehr durch den Spielstein zu sehen sind.
Hall-Sensoren
Zur Erprobung der Hall-Sensoren wird ein Ausschnitt des Spielbretts mittels 3D-Druck gefertigt. Diese Testversion ermöglicht die präzise Installation und Verkabelung eines einzelnen Sensors. Nach der Montage dient der Ausschnitt als Testplattform: Ein Spielstein mit integriertem Magneten wird auf die Oberfläche platziert, um die Erkennungsfähigkeit des Sensors zu überprüfen. Dabei wird insbesondere getestet, ob der Sensor den Magneten zuverlässig durch zwei Schichten des PLA-Druckmaterials detektieren kann. Diese Methode gewährleistet eine realitätsnahe Simulation der späteren Spielbrettbedingungen und ermöglicht eine genaue Beurteilung der Sensorleistung.
Testergebnis-Schwellwerte:
- Spielstein liegt nicht auf dem Spielbrett : Sensorwert kleiner 650
- Spielstein liegt auf dem Spielbrett : Sensorwert größer 650
Die gemessenen Werte können aufgrund der Toleranzen des Systems geringfügige Schwankungen aufweisen. Aus diesem Grund wurden keine festen Werte für den Analog-Digital-Wandler definiert. Stattdessen wurden Schwellwerte festgelegt, die in jedem Fall entweder über- oder unterschritten werden.
Der durchgeführte Test demonstriert die zuverlässige Erkennung eines magnetischen Spielsteins durch den Hall-Sensor. Der korrekt platzierte Spielstein erzeugt stabile Messwerte zwischen 750 und 850. Selbst bei Bewegungen innerhalb der Toleranzgrenzen bleiben die Werte deutlich über dem definierten Schwellwert von 650, wobei nur geringfügige Schwankungen durch die Bewegung des Spielsteins zu beobachten sind. Bei Entfernung des Spielsteins fällt der Messwert abrupt unter den Schwellwert von 650. Nach der Wiederauflage steigt der Wert unmittelbar wieder auf das ursprüngliche Niveau an, was eine klare Unterscheidung zwischen An- und Abwesenheit des Spielsteins ermöglicht.
Die Messung zeigt eindeutig die technische Eignung des Hall-Sensors zur Spielsteinerkennung. Der deutliche Abstand zwischen den Messwerten und dem Schwellwert gewährleistet eine robuste Erkennung auch bei leichten Positionsschwankungen des Spielsteins.
-
 Abb. 14. Anschluss Funktionstest
Abb. 14. Anschluss Funktionstest -
 Abb.15. Spielbrettaufbau ohne Stein
Abb.15. Spielbrettaufbau ohne Stein -
 Abb. 16. Spielbrettaufbau mit Stein
Abb. 16. Spielbrettaufbau mit Stein -
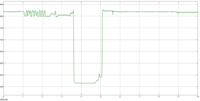 Abb. 17. Test Hall-Sensor
Abb. 17. Test Hall-Sensor




Reset-Taster
Zur Erprobung des Reset-Tasters wird ein Testaufbau mit dem Mikrocontroller erstellt. Diese Testversion ermöglicht die präzise Installation und Verkabelung eines einzelnen Reset-Tasters. Nach der Montage dient der Aufbau als Testplattform: Der Reset-Taster wird an einen Eingang des Mikrocontrollers angeschlossen, während eine LED zur Signalisierung des Reset-Zustands verwendet wird. Zusätzlich muss bei der Implementierung des Tasters der interne Pullup-Widerstand des Arduino aktiviert werden.
Der Test umfasst folgende Schritte:
- Betätigung des Reset-Tasters für verschiedene Zeitspannen (kurz, mittel, lang).
- Überprüfung der Reaktion des Mikrocontrollers auf die Tasterbetätigung.
- Beobachtung des Taster-Zustandes zur Verifizierung des Reset-Vorgangs.
Diese Methode gewährleistet eine realitätsnahe Simulation der späteren Einsatzbedingungen und ermöglicht eine genaue Beurteilung der Reset-Taster-Funktion.
Testergebnis:
- Kurze Betätigung: Kein Reset
- Mittlere Betätigung: Erfolgreicher Reset des Systems
- Lange Betätigung: Erfolgreicher Reset des Systems
-
 Abb.18. Einbau Taster
Abb.18. Einbau Taster -
 Abb. 19. Verkabelung Taster
Abb. 19. Verkabelung Taster -
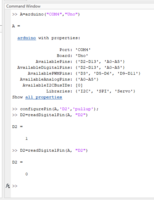 Abb. 20. Test einlesen Taster
Abb. 20. Test einlesen Taster



Motor und Klappe
Zur Erprobung des Servomotors und der Klappe wird der Aufbau mittels 3D-Druck gefertigt. Der Aufbau der Gesamtkonstruktion ermöglicht die präzise Installation und Verkabelung des Servomotors sowie die Montage der Klappe. Nach der Installation dient der Aufbau als Testplattform: Der Servomotor wird an den Mikrocontroller angeschlossen, der die Steuerungssignale sendet.
Der Test umfasst folgende Schritte:
- Kalibrierung des Servomotors für die korrekte Öffnungs- und Schließposition der Klappe.
- Durchführung mehrerer Öffnungs- und Schließzyklen zur Überprüfung der Zuverlässigkeit.
- Überprüfung der Stabilität der Klappe in geöffnetem und geschlossenem Zustand.
Testergebnis:
Klappe hält in beiden Endpositionen zuverlässig.
Der Test zeigt, dass der Servomotor die Klappe zuverlässig und präzise öffnet und nach dem Schließen verriegelt. Anschließend halten die Magnete in der Klappe diese in Position.
Beim Motortest ist jedoch aufgefallen, dass der Motor gelegentlich ein unangenehmes Summen von sich gibt. Um dies zu unterbinden, wurde dem Aufbau ein NPN-Bipolartransistor hinzugefügt, um den Motor abzuschalten solange er nicht benötigt wird. Der Arduino nutzt Ausgang 2, um den Transistor zu aktivieren, wodurch das PWM-Signal von Ausgang 3 durchgeleitet wird. Diese Schaltung ermöglicht eine Steuerung der Leistungsabgabe, indem der Transistor als Schalter fungiert und das PWM-Signal nur durchlässt wenn es benötigt wird. So wird eine effiziente Kontrolle des angeschlossenen Motors erreicht.
-
 Abb. 21. Anschluss Servomotor
Abb. 21. Anschluss Servomotor -
 Abb. 22. Servomotor Mittig
Abb. 22. Servomotor Mittig -
 Abb. 23. Servomotor ausgefahren
Abb. 23. Servomotor ausgefahren -
 Abb. 24. Servomotor öffen der Klappe
Abb. 24. Servomotor öffen der Klappe -
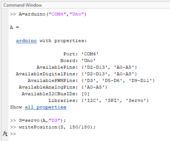 Abb. 25. Test Servomotor
Abb. 25. Test Servomotor





Gesamtaufbau
Nach den Test der Einzelkomponenten wird das Gesamtsystem zusammengesetzt und ein umfassender Systemtest durchgeführt, der sämtliche Funktionen beinhaktet. In diesem Zusammenhang wird die Anforderungsliste erweitert und die Erfüllung der einzelnen Anforderungen überprüft. Dadurch können sämtliche Funktionalitäten systematisch geprüft und die Ergebnisse objektiv bewertet werden.
Dazu wurde zuerst die Sensoren mit Kabeln für Stromversorgung, Ground und einer Signalleitung verlötet. Anschließend wurden die Sensoren in die unter dem Spielbrett vorgesehenen Vertiefungen geklebt und mit Heißkleber fixiert. Zusätzlich wurden die Verschiedenen Kabel mit zwei Kabelbindern sortiert und anschließend auf den Arduino gesteckt. Dafür werden die Analogen Eingänge 0-5 des Arduino genutzt. Die Steckreihenfolge ist dabei nicht relevant, da lediglich abgefragt wird, ob alle Steine (Magnete) im Spielbrett liegen. Für die Spannungsversorgung wird der 5V Output des Arduino verwendet sowie ein Ground Pin.
Im zweiten Schritt erfolgte der Einbau des Servo-Motors in das Gehäuse sowie dessen elektrische Anbindung an den Arduino. Hierbei wurde der Servo-Motor im vorgesehenen Bereich des Gehäuses platziert. Anschließend wurde die elektrische Verbindung hergestellt, wobei Verbindungskabel zum Einsatz kamen, um den Servo-Motor mit dem Arduino zu verbinden. Ein wichtiger Bestandteil dieser Verbindung war der Einsatz eines NPN-Transistors. Dieser Transistor dient als elektronischer Schalter und ermöglicht das Ein- und Ausschalten des Servo-Motors durch den Arduino.
Im nächsten Arbeitsschritt wurde der Reset-Knopf eingebaut und die Stromversorgung installiert. Der Reset-Knopf wurde zur Sicherung eingeklebt. Eine elektrische Verbindung zwischen dem Knopf und dem digitalen Eingang 4 des Arduino wurde hergestellt. Diese Konfiguration ermöglicht zwei wichtige Funktionen:
- Ein- und Ausschalten des gesamten Spiels
- Neustart des Spiels nach dem Öffnen und Schließen der Klappe
Die Stromversorgung erfolgt über ein 9V Steckernetzteil, das mit einem Ein- und Ausschalter versehen wurde.
Zur Abschließenden Montage des Projekts wurden folgende Schritte durchgeführt:
- Einsetzen der Klappe in das Gehäuse
- Montage des Arduino im Gehäuse
- Platzierung des Spielbretts
- Fixierung des Spielbretts mit vier Schrauben
Diese finale Montage vervollständigt den Aufbau des Spiels und macht es einsatzbereit.
-
 Abb. 26. Verdrahtung Spielbrett Hall-Sensor
Abb. 26. Verdrahtung Spielbrett Hall-Sensor -
Abb. 27. Einbau Taster
-
 Abb. 28. Anschluss Servomotor
Abb. 28. Anschluss Servomotor

Ergebnis
Umsetzung der Anforderungen
Nach dem Abschluss des mechanischen Aufbaus und der Programmierung des Systems wurden alle zu beginn des Projektes festgelegten Anforderungen getestet.
| Nr. | Priorisierung | Anforderung | Getestet | Erfüllt | Bemerkung |
|---|---|---|---|---|---|
| 1 | Gering | Das Puzzle muss in einen Schuhkarton passen. | JA | JA | Abmaße kleiner als Abmaße eines Schuhkartons (20x35x15) |
| 2 | Mittel | Das Rätsel soll für Escape-Room-Einsteiger geeignet sein. | JA | JA | Erfolgreiche Lösungsversuche durch Kommilitonen |
| 3 | Hoch | Die Lösungszeit soll maximal 5 Minuten betragen. | JA | JA | Erfolgreiche Lösungsversuche durch Kommilitonen |
| 4 | Hoch | Die Ausgabe erfolgt bei korrekter Lösung als Vierstelliger Zahlencode. | JA | JA | Test des Gesamtsystems durchgeführt / Klappe öffnet automatisch und bietet platz für Code Karte |
| 5 | Mittel | Automatische Erkennung der richtigen Lösung | JA | JA | Test des Gesamtsystems durchgeführt / Klappe öffnet automatisch |
| 6 | Mittel | Einzelteile möglichst mit 3D-Druck fertigbar. | JA | JA | Alle selbst Konstruierten Teile sind 3D gedruckt |
| 7 | Hoch | Der Mikrocontroller muss vom Typ Arduino Uno R3 sein. | JA | JA | Verbaut wurde ein Arduino Uno R3 |
| 8 | Hoch | Der Ausgabemechanismus soll mit einem Servo-Motor realisiert werden. | JA | JA | Test des Gesamtsystems durchgeführt / Klappe öffnet automatisch durch drehen eines Servo-Motors |
| 9 | Hoch | Nach dem Spielende soll ein Reset durchgeführt werden können. | JA | JA | Reset-Taster wurde eingebaut und auf Funktion getestet / Reset wird erfolgreich durchgeführt |
| 10 | Hoch | Die Stromversorgung soll mit einem geeigneten Steckernetzteil für einen Arduino erfolgen. | JA | JA | Verwendung eines 9V Steckernetzteil |
| 11 | Hoch | Es soll ein An/Aus-Schalter eingebaut werden. | JA | JA | An/Aus-Schalter wurde eingebaut und auf Funktion getestet |
| 12 | Hoch | Das Hauptprogramm soll kontinuierlich den Systemzustand überprüfen und den Servo-Motor zur Codeausgabe steuern. | JA | JA | Test des Gesamtsystems durchgeführt / Sensoren werden kontinuierlich abgefragt |
| 13 | Mittel | Es soll eine Initialisierungsroutine für den Systemstart vorgesehen werden. | JA | JA | System startet immer in der gleichen definierten Position |
| 14 | Hoch | Das Arduino-System soll über Matlab-Simulink-Funktionen gesteuert werden. | JA | JA | Programmierung wurde mit Matlab und Simulink durchgeführt |
| 15 | Mittel | Das System muss benutzerfreundlich und für Kinder wie Erwachsene geeignet sein. | JA | JA | Erfolgreiche Lösungsversuche durch Kommilitonen und Familie |
| 16 | Hoch | Es müssen Tipps und Musterlösungen für Spielleiter bereitgestellt werden. | JA | JA | Drei Karten mit Hilfestellungen und eine Musterlösung liegen dem Spiel bei |
| 18 | Hoch | Es soll nur eine Lösungsmöglichkeit für das Puzzle geben. | JA | JA | Realisiert durch Form des Spielbretts und der Spielsteine |
Funktionstest des Pentomino-Puzzles
Spielstart und Puzzlelösung:
- Kippschalter umlegen, um das Pentomino-Puzzle zu aktivieren.
- Alle Spielsteine in das Spielbrett einlegen.
- Puzzle lösen, bis alle Spielsteine korrekt platziert sind.
Automatische Reaktion bei erfolgreicher Lösung:
- Sobald alle Spielsteine korrekt im Spielbrett liegen, aktiviert sich der Servo-Motor.
- Der Motor öffnet die Klappe und fährt anschließend in die mittlere Position zurück.
- Die Klappe öffnet sich.
Zugang zum Code:
- Nach dem Öffnen der Klappe wird eine Karte mit einem vierstelligen Code zugänglich.
- Die Karte kann nun entnommen werden.
Zurücksetzen des Spiels:
- Karte mit dem vierstelligen Code wieder einlegen.
- Klappe manuell schließen.
- Reset-Taster drücken.
- Nach Betätigung des Reset-Tasters fährt der Motor in die Verriegelungsposition.
Vorbereitung für die nächste Runde:
- Spielsteine können nun für eine neue Spielrunde eingelegt werden.
Projektergebnis
Das mechatronische Pentomino Puzzle wurde erfolgreich als interaktives Escape-Room-Spiel für Einsteiger entwickelt und umgesetzt. Das fertige Projekt besteht aus einem 3D-gedruckten Spielbrett mit integrierten Hall-Sensoren, einem Gehäuse zur Unterbringung der Technik, sechs Pentomino-Teilen mit eingelassenen Magneten und einem Arduino-gesteuerten Mechanismus zur Codeausgabe.
Bei korrekter Platzierung aller Spielsteine öffnet sich automatisch die Servo-Motor gesteuerte Geheimklappe, die einen vierstelligen Zahlencode freigibt. Der Aufbau umfasst einen Arduino Uno R3 Mikrocontroller, einen Servomotor für den Klappmechanismus und einen Reset-Taster zum Zurücksetzen des Spiels. Das Puzzle erfüllt alle definierten Anforderungen, einschließlich der Eignung für Escape-Room-Einsteiger und einer maximalen Lösungszeit von ca. 5 Minuten.
-
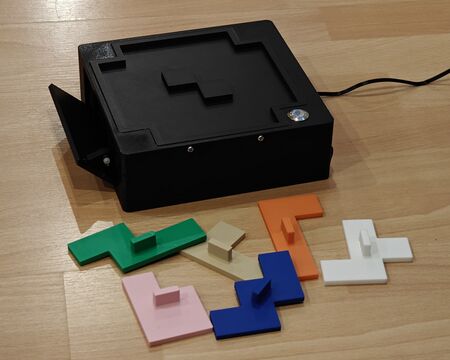 Abb. 29. Fertiges Pentomino-Puzzle
Abb. 29. Fertiges Pentomino-Puzzle -
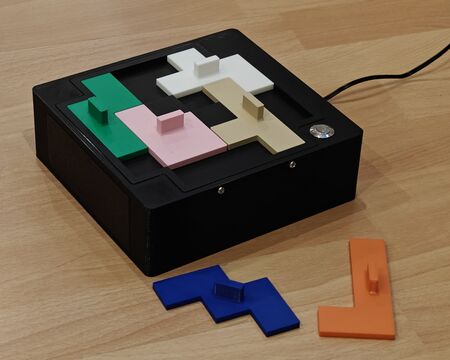 Abb. 30. Fertiges Pentomino-Puzzle
Abb. 30. Fertiges Pentomino-Puzzle -
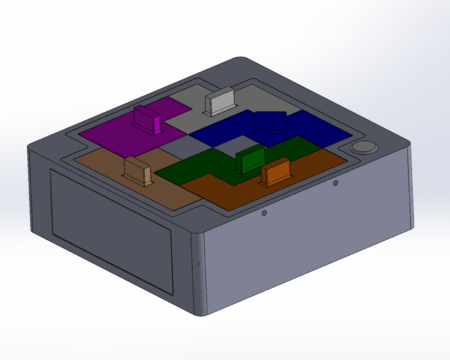 Abb. 31. Gesamtaufbau Konstruktion
Abb. 31. Gesamtaufbau Konstruktion

Verbesserungs- und Erweiterungsmöglichkeiten
Verbesserungsmöglichkeiten:
- Automatisches Schließen der Klappe.
- Weitere Lösungen mit anderen Spielsteinen.
- Ermöglicht mehrfaches Spielen.
Erweiterungsmöglichkeiten:
- Die Schwierigkeitsstufe des Spiels kann beispielsweise durch eine Erhöhung der Spielsteinanzahl angepasst werden. Dabei muss jedoch beachtet werden, dass es weiterhin nur eine mögliche Lösung geben darf.
- Eine weitere Möglichkeit das Spiel zu erweitern sind weitere Spielsteine, die jedoch gar nicht in die Gesamtlösung des Spiels passen. So kann die Schwierigkeit erhöht werden ohne den Gesamtaufbau zu verändern.
Zusammenfassung
Das Pentomino Puzzle ist ein mechatronisches Escape-Room-Spiel, das im Rahmen des Projektes im Fachpraktikum Mechatronik im Masterstudiengang Business and Systems Engineering entwickelt wurde. Es kombiniert das klassische geometrische Rätsel mit moderner Elektronik und bietet eine einzigartige Spielerfahrung.
Hauptmerkmale:
- Spielprinzip: Die Spieler müssen sechs Pentomino-Teile korrekt auf einem Spielbrett platzieren.
- Technologie: Das Spiel Verwendet Hall-Sensoren, Magnete, einen Arduino-Mikrocontroller und einen Servomotor.
- Mechanismus: Bei korrekter Lösung öffnet sich automatisch eine Geheimklappe.
- Ausgabe: Ein vierstelliger Zahlencode wird freigegeben.
- Zielgruppe: Geeignet für Escape-Room-Einsteiger.
Technische Umsetzung:
- 3D-gedrucktes Spielbrett, Gehäuse mit Klappe und Puzzleteile aus PLA
- Integrierte Hall-Sensoren im Spielbrett
- Magnete in den Puzzleteilen
- Arduino Uno R3 zur Steuerung
- Servomotor für den Klappmechanismus
- Programmierung mittels MATLAB und Simulink
Entwicklungsprozess:
- Sorgfältige Planung und Anforderungsanalyse
- Umsetzung der Hardware und Software
- Umfangreiche Komponenten- und Anforderungstests
- Aufbau und Test des Gesamtsystems
Ergebnis:
Das fertige Projekt erfüllt alle definierten Anforderungen und bietet ein funktionierendes, interaktives Puzzle-Erlebnis für Escape-Room-Einsteiger. Es demonstriert erfolgreich die Anwendung mechatronischer Prinzipien in einem spielerischen Kontext.
Lessons Learned
Strategische Planung
- Gründliche Planung erleichtert Projektablauf und erhöht die Chance auf ein erfolgreiches Projekt.
- Hindernisse und Probleme können frühzeitig erkannt werden.
Effizientes Ressourcenmanagement
- Klare Aufgabenteilung und realistisches Zeitmanagement fördern Verantwortlichkeit und das vorankommen des Projektes.
Fertigungstoleranzen berücksichtigen
- Frühzeitige Einbeziehung von Toleranzen, besonders beim 3D-Druck, zur Minimierung von Nacharbeiten.
Kommunikation und Agilität
- Regelmäßiger Austausch im Team und flexible Anpassung an Änderungen.
Qualitätssicherung
- Tests und kontinuierliche Überprüfungen zur Gewährleistung der Produktqualität.
- Besonders der Mehrfache 3D-Druck als Prototypen.
Dokumentation
- Sorgfältige Aufzeichnung von Prozessen und Entscheidungen für den Wiki Artikel und die Projektmesse.
- Fördert die korrekte und ausführliche Dokumentation von Arbeitsschritten.
Projektunterlagen
Projektplan
Der Projektplan zeigt den zeitlichen Ablauf des Projekt von Ende September 2024 bis Mitte Januar 2025. Die Abbildung zeigt ein Gantt-Diagramm, dass die Einzelnen Aufgaben als Balken darstellt. Es sind Start- und Endzeit, der Bearbeitung und der Fortschritt der jeweiligen Aufgabe dargestellt.

Projektdurchführung
Die Projektdurchführung orientiert sich dabei an dem aufgestellten Projektplan. Es wurde darauf geachtet, die terminlichen Vorgaben einzuhalten. Die Durchführung an sich hat, abgesehen von krankheits- und feiertagsbedingten Ausfällen, zwischenzeitlich zu einer Verzögerung von ein Paar Tagen geführt. Dieser Verzug konnte jedoch durch intensive Arbeitstage ausgeglichen werden.
YouTube Video
Das folgende Video bietet einen Einblick in den Aufbau und die Funktionsweise eines Escape Games, das im Rahmen des Moduls Angewandte Mechatronik im Masterstudiengang Business and Systems Engineering entwickelt wurde. Das mechatronische Pentomino Puzzle stellt eine Weiterentwicklung des klassischen geometrischen Rätsels dar. Durch den Einsatz von Magneten, Hall-Sensoren und einem Arduino-Mikrocontroller wird das traditionelle Spiel in ein elektronisches Puzzle für ein Escape Game verwandelt. Die Herausforderung besteht darin, 6 Pentomino-Teile korrekt in ein Spielbrett einzulegen, wobei die Spieler ihr räumliches Denkvermögen und ihre logische Kombinationsgabe unter Beweis stellen müssen.
Weblinks
Dieses ZIP-Archiv enthält alle relevanten CAD- und Programmier-Dateien für das Projekt. Die Dateien können verwendet werden, um die Konstruktionen und Modelle in einer CAD-Software zu öffnen und weiter zu bearbeiten. Bitte stellen Sie sicher, dass Sie über eine geeignete Software verfügen, um die Dateien zu extrahieren und anzuzeigen.
Konstruktion: Konstruktionsdateien Pentomino Puzzle
Projektplanung: Projektplanung Pentomino Puzzle
Projektmesse: Projektmesse Pentomino Puzzle
Bilder Wiki-Artikel: Bilder Wiki-Artikel Pentomino Puzzle
Literatur
→ zurück zur Übersicht: WS 24/25: Escape Game
- ↑ https://www.pentoma.de/download-loesungsprogramme Pentomino-Puzzle erstellen
- ↑ https://de.mathworks.com/discovery/arduino-programming-matlab-simulink.html Arduino Erweiterung Matlab