Schüler*innenprogramm: Mechatronik mit Arduino: Unterschied zwischen den Versionen
Keine Bearbeitungszusammenfassung |
|||
| (Eine dazwischenliegende Version desselben Benutzers wird nicht angezeigt) | |||
| Zeile 4: | Zeile 4: | ||
|- | |- | ||
| '''Autor:''' || [[Benutzer:Ulrich_Schneider| Prof. Dr.-Ing. Schneider]] | | '''Autor:''' || [[Benutzer:Ulrich_Schneider| Prof. Dr.-Ing. Schneider]] | ||
|- | |||
| colspan="2" | '''Workshop''' | |||
|} | |} | ||
{| class="wikitable" | {| class="wikitable" | ||
|- | |- | ||
| '''Schwerpunkt:''' || Programmierung, Microcontroller | |||
| '''Schwerpunkt:''' || | |||
|- | |- | ||
| '''Wo?''' || | | '''Wo?''' || Schulen im Raum Lippstadt, Voraussetzungen vor Ort: Informatikraum mit PCs und Beamer, optional auch als Onlinekurs | ||
|- | |- | ||
| '''Für wen?''' || | | '''Für wen?''' || Ab Klasse 9 | ||
|} | |} | ||
| Zeile 27: | Zeile 27: | ||
* Ansteuerung von LEDs und Motoren | * Ansteuerung von LEDs und Motoren | ||
* Tonausgabe über Lautsprecher | * Tonausgabe über Lautsprecher | ||
* Aufbau einfacher Schaltungen auf einem | * Aufbau einfacher Schaltungen auf einem Steckbrett | ||
{| class="wikitable" | |||
|+ Tabelle 1: Ablauf des Workshops | |||
|- | |||
! Uhrzeit !! Inhalt!! Dauer | |||
|- | |||
| 13:00 || Begrüßung || 5 Min. | |||
|- | |||
| 13:05 || Einführung Mikrocontroller || 5 Min. | |||
|- | |||
| 13:10 || Open Roberta Lab, "Hello World!" || 10 Min. | |||
|- | |||
| 13:20 || Blinkende LED (D13) || 10 Min. | |||
|- | |||
| 13:40 || Wechselblinker || 15 Min. | |||
|- | |||
| 13:55 || LED pulsieren lassen || 15 Min. | |||
|- | |||
| 14:10 || LED mit Potentiometer dimmen || 15 Min. | |||
|- | |||
| 14:25 || Verabschiedung || 5 Min. | |||
|} | |||
== Motivation == | |||
Mikrocontroller sind in unserer modernen Welt überall etwas versteckt zu finden. Sie steuern Kaffeemaschinen, Lichtschalter, Staubsauger, Kühlschränke, Waschmaschinen bis hin zu Rasenmähern. Sie bewässern automatisch unsere Pflanzen und prüfen den Kalkgehalt unseres Wassers. Dieser Workshop gibt einen Einblick in die Funktion eines Mikrocontrollers am Beispiel der Plattform Arduino. | |||
Was als Experimentierprojekt für Elektronikbegeisterte begann, ist mittlerweile zur professionellen Lösung für industrielle Anwendungen geworden – der Microcontroller Arduino. In praktischen Versuchen erlernst Du das Programmieren des beliebten Microcontrollers. Vorkenntnisse sind nicht notwendig – Schritt für Schritt erklären wir Dir den Arduino und seine Komponenten – und warum Programmierung kein Hexenwerk ist. | |||
== Software == | |||
Der Arduino lässt sich mir viele Entwicklungsumgebungen programmieren. Die einfachste Umgebung stellt das [https://lab.open-roberta.org/ Open Roberta Lab] bereit. | |||
== Vorbereitung des Labors == | |||
* Pro zweier Team einen PC mit USB-Eingang und Internetzugang | |||
* Auf den PCs muss der [https://github.com/OpenRoberta/openroberta-connector/releases Open Roberta Connector] in der neuesten Version (1.6.8) und [https://www.oracle.com/de/java/technologies/downloads/ Java] installiert sein. | |||
* Download JRE 8u441: [https://www.java.com/en/download/manual.jsp] | |||
* Eine Anleitung gibt es [https://jira.iais.fraunhofer.de/wiki/display/ORInfo/Vorbereitung+Nepo4Arduino hier]. | |||
* Die Seite [https://lab.open-roberta.org/ Open Roberta Lab] muss erreichbar sein, da wir mit dieser programmieren wollen. | |||
* Dozenten-PC und Beamer für die visuelle Anleitung müssen verfügbar sein. | |||
* 10x [[HSHL-Mechatronik-Baukasten]] | |||
* 1x Multimeter | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Funktionstest: Hallo Welt! </strong> | |||
|- | |||
| | |||
# Open Roberta Lab starten. | |||
# <code>Nepo4Arduino</code> wählen. | |||
# Arduino via USB anschließen. | |||
# <code>Open Roberta Connector</code> starten. | |||
# Verbindung herstellen. | |||
# Token kopieren und unter <code>Roboter→Verbinden</code> eingeben (<code>STRG+V</code>). | |||
# Programm in Abb. 2 schreiben und mit ▶ übertragen. | |||
# <code>Arduino Uno→Serieller Monitor</code> im <code>Open Roberta Connector</code> öffnen. | |||
# Erscheint dort <code>Hallo Welt</code>? - Gratulation!! | |||
[[Datei:ORL Hallo Welt.jpg|mini|links|Abb. 2: Testprogramm gibt "Hallo Welt!" auf dem seriellen Monitor aus.]] | |||
|- | |||
|} | |||
== Aufgabe 1: Blinkende LED == | |||
[[Datei:Arduino-onboard-led-pin13-blink.jpg|thumb|rigth|300px|Abb. 3: Blinkende Leuchten werden im Verkehr]] | |||
[[Datei:Anode Kathode.png|thumb|rigth|100px|Abb. 4: LED]] | |||
Auf dem Arduino ist an Pin 13 bereits eine LED eingebaut (siehe Abb. 3). Häufig blinkt diese Lampe schon, wenn man ein neues Arduino-Board anschließt, da das Blink-Programm zum Testen des Boards je nach Hersteller bereits vorab installiert ist. Wir werden dieses Blinken jetzt selbst programmieren. | |||
# Roboterkonfiguration (LED an D13) | |||
# In einer Schleife - LED einschalten, 1 s warten, LED ausschalten, 1 s warten,usw. | |||
# Programm auf Arduino übertragen | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Einführung: Steckbrett </strong> | |||
|- | |||
| | |||
[[Datei:Steckbrett.png|mini|links|Abb. 4: Auf dem Steckbrett werden experimentelle Schaltungen aufgebaut]] | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Musterlösung </strong> | |||
|- | |||
| | |||
[[Datei:ORL A1 Roboterkonfiguration.jpg|mini|links|Abb. 5: Roboterkonfiguration für die interne LED]] | |||
[[Datei:ORL A1 Programm.jpg|mini|links|Abb. 6: Testprogramm gibt "Hallo Welt!" auf dem seriellen Monitor aus.]] | |||
|- | |||
|} | |||
== Aufgabe 2: Wechselblinker == | |||
[[Datei:Blinker Ueberweg.jpg|thumb|rigth|300px|Abb. 7: Blinkende Leuchten werden im Verkehr]] | |||
Zwei Leuchtdioden sollen abwechselnd blinken. Blinkende Leuchten werden im Verkehr als Warnsignal an Fußgängerüberwegen und an Bahnübergängen eingesetzt (vgl. Abb. 6). | |||
# Schalte eine LED mit Vorwiderstand über D8 gegen GND. | |||
# Schalte eine LED mit Vorwiderstand über D7 gegen GND. | |||
# Passe die Roboterkonfiguration entsprechend an. | |||
# Schalte im Sekundentakt wechselnd eine LED an und die andere aus. | |||
# Übertrage das Programm auf den Arduino. | |||
'''Frage:''' Wieso hat die LED unterschiedlich lange Beine (vgl. Abb. 4)? | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Stückliste </strong> | |||
|- | |||
| | |||
{| class="wikitable" | |||
|+ Tabelle 2: Stückliste für den Wechselblinker | |||
|- | |||
! Anzahl !! Bauteil !! Abbildung | |||
|- | |||
| 2 || blaue LED || [[Datei:BlaueLED.jpg|ohne|100px|]] | |||
|- | |||
| 2 || 100 Ω Widerstand (braun - schwarz - braun) || [[Datei:100Ohm.jpg|ohne|100px|]] | |||
|} | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Schaltplan </strong> | |||
|- | |||
| | |||
[[Datei:ORL A2 Schaltplan.jpg|mini|links|Abb. 8: Schaltplan für den Wechselblinker]] | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Musterlösung </strong> | |||
|- | |||
| | |||
[[Datei:ORL_A2_Programm.jpg|mini|links|Abb. 9: Programm für den Wechselblinker]] | |||
|- | |||
|} | |||
== Aufgabe 3: LED pulsieren lassen == | |||
[[Datei:FAQ PWM dimmen DE.PNG|thumb|rigth|450px|Abb. 10: Pulsweitenmodulation zur Einstellung der Helligkeit einer LED]] | |||
Eine LED soll pulsierend heller und dunkler werden (engl. faden). | |||
# Schalte eine LED mit Vorwiderstand über D6 gegen GND. | |||
# Passe die Roboterkonfiguration entsprechend an (s. Abb. 12). | |||
# Schicke Werte von 0..255 an die LED. | |||
# Übertrage das Programm auf den Arduino. | |||
# Bonus: Erweitern Sie Ihr Programm, so dass die LED abwechselnd heller und wieder dunkler wird. | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Stückliste </strong> | |||
|- | |||
| | |||
{| class="wikitable" | |||
|+ Tabelle 3: Stückliste für die pulsierende LED | |||
|- | |||
! Anzahl !! Bauteil !! Abbildung | |||
|- | |||
| 1 || blaue LED || [[Datei:BlaueLED.jpg|ohne|100px|]] | |||
|- | |||
| 1 || 100 Ω Widerstand (braun - schwarz - braun) || [[Datei:100Ohm.jpg|ohne|100px|]] | |||
|} | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Schaltplan </strong> | |||
|- | |||
| | |||
[[Datei:ORL A3 Schaltplan.jpg|mini|links|Abb. 11: Schaltplan für die pulsierende LED]] | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Tipp 1 </strong> | |||
|- | |||
| Die LED benötigt einen 100 Ω Vorwiderstand, damit Sie nicht kaputt geht (Farbcode: Braun-Schwarz-Braun). | |||
|- | |||
| Das lange Beinchen der Diode ist Plus (+) und das Kurze Minus (-, GND). | |||
|- | |||
| Mit einer Pulsweitenmodulation (s. Abb. 10) lässt sich eine LED dimmen. | |||
|- | |||
| Die PWM-fähigen Ports sind mit ~ markiert. Wir nehmen Digitalport ~6. | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Musterlösung </strong> | |||
|- | |||
| | |||
[[Datei:ORL A3 Roboterkonfiguration.jpg|mini|links|Abb. 12: Roboterkonfiguration]] | |||
[[Datei:ORL_A3_Programm.jpg|mini|links|Abb. 13: Programm für die pulsierende LED]] | |||
|- | |||
|} | |||
== Aufgabe 4: LED mit Potentiometer dimmen == | |||
Eine LED soll gedimmt werden. Die Helligkeit soll mit einem Drehregler (Potentiometer) eingestellt werden. | |||
Lerninhalt: Spannung eines Drehreglers auslesen, Sensorwerte mathematisch verarbeiten und für eine Ausgabe verwenden. | |||
Ein Drehregler hat drei Anschlüsse. Außen wird rechts + und links – angeschlossen. Von dem mittleren Pin geht ein Kabel zu einem analogen Eingangspin am Mikrocontroller-Board. Wenn man den Drehregler dreht, dann gibt der mittlere Pin eine Spannung zwischen 0 und 5 Volt aus. Drehregler ganz links: 0 V und Drehregler ganz rechts: 5 V, bzw. seitenverkehrt, je nach Verkabelung. Der 10-Bit Analog-Digital-Wandler wandelt die gemessene Spannung in einen Wertebereich um. | |||
# Schalte eine LED mit Vorwiderstand über D6 gegen GND. | |||
# Schließe das Potentiometer an A0 an und Versorge es mit 5V. | |||
# Passe die Roboterkonfiguration entsprechend an (s. Abb. 15). | |||
# Messe die Eingangswerte des Potentiometers. Welchen Wertebereich hat A0? | |||
# Rechne die Eingangswerte in die Ausgangswerte um. | |||
# Schicke Werte von 0..255 an die LED. | |||
# Übertrage das Programm auf den Arduino. | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Stückliste </strong> | |||
|- | |||
| | |||
{| class="wikitable" | |||
|+ Tabelle 4: Stückliste für die gedimmte LED | |||
|- | |||
! Anzahl !! Bauteil !! Abbildung | |||
|- | |||
| 1 || blaue LED || [[Datei:BlaueLED.jpg|ohne|100px|]] | |||
|- | |||
| 1 || 100 Ω Widerstand (braun - schwarz - braun) || [[Datei:100Ohm.jpg|ohne|100px|]] | |||
|- | |||
| 1 || 10 kΩ Potentiometer || [[Datei:R12-KT-16.jpg|ohne|100px|]] | |||
|} | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Schaltplan </strong> | |||
|- | |||
| | |||
[[Datei:ORL A4 Schaltplan.jpg|mini|links|Abb. 14: Schaltplan für die gedimmte LED]] | |||
|- | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Tipp 1 </strong> | |||
|- | |||
| Die LED benötigt einen 100 Ω Vorwiderstand, damit Sie nicht kaputt geht (Farbcode: Braun-Schwarz-Braun). | |||
|- | |||
| Das lange Beinchen der Diode ist Plus (+) und das Kurze Minus (-, GND). | |||
|- | |||
| Mit einer Pulsweitenmodulation (s. Abb. 9) lässt sich eine LED dimmen. | |||
|- | |||
| Die PWM-fähigen Ports sind mit ~ markiert. Wir nehmen Digitalport ~6 (vgl. Abb. 134). | |||
|- | |||
| Das Potentiometer hat drei Beinchen: rechts (5 V), mitte (A0), links (GND) (vgl. Abb. 14). | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Tipp 2 </strong> | |||
|- | |||
| Am Analogeingang A0 ist ein 10-Bit Analog-Digital-Wandler verbaut. 0 V wird zum Digitalwert 0 und 5 V zum Digitalwert 1023 (<math>2^{10}-1</math>). | |||
|- | |||
| 0..1023 wird über die Division durch 4 ungefähr zum Wertebereich 0..255 für die PWM. | |||
|} | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Musterlösung </strong> | |||
|- | |||
| | |||
[[Datei:ORL A4 Roboterkonfiguration.jpg|mini|links|Abb. 15: Roboterkonfiguration]] | |||
[[Datei:ORL_A4_Programm.jpg|mini|links|Abb. 16: Programm für die gedimmte LED]] | |||
|- | |||
|} | |||
== Weiterführende Links == | |||
* [[Arduino| Einstieg in die Welt des Arduino Uno R3]] | |||
* Gäste-WLAN an der HSHL: [[Medium:WLAN Gäste Handzettel.pdf|DE]]/[[Medium:WiFi Guests Handout.pdf|EN]] | |||
= Programm = | |||
{| role="presentation" class="wikitable mw-collapsible mw-collapsed" | |||
| <strong>Programmübersicht </strong> | |||
|- | |||
| | |||
[[Datei:260212 GruppeD.png|1000px]] | |||
|- | |||
|} | |||
= Anreise = | |||
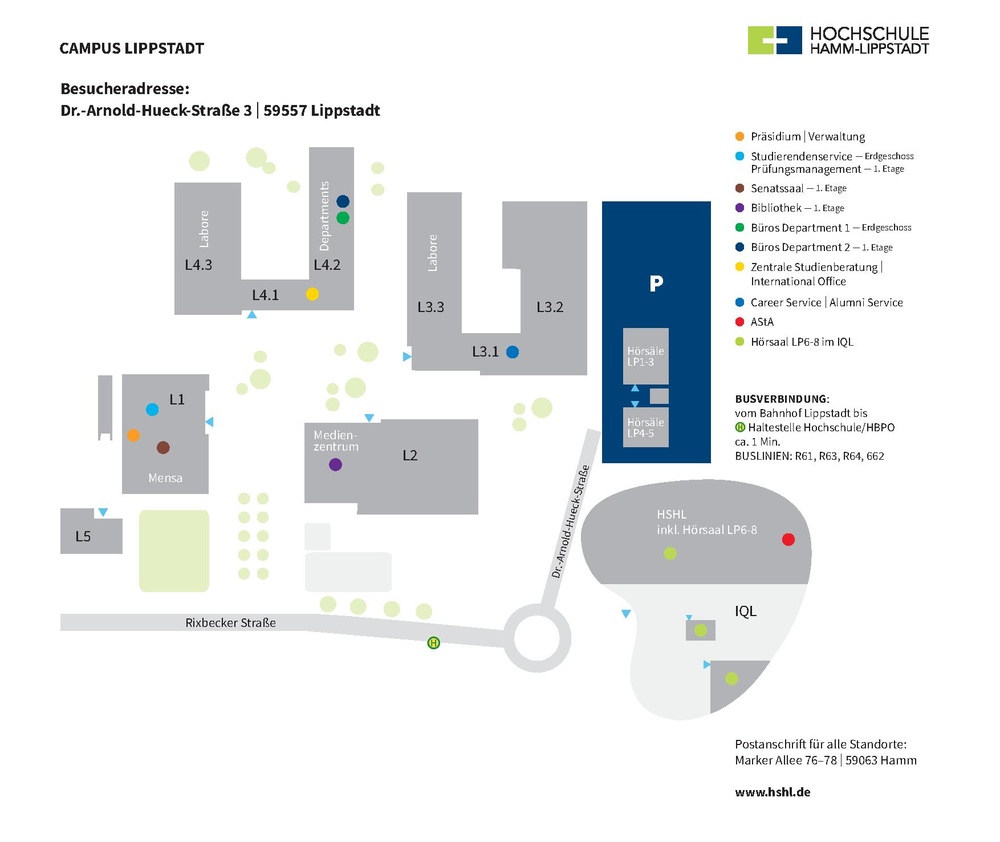
[[Datei:240314 Plan Anreise LIP DE.pdf|1000px]] | |||
---- | ---- | ||
→ zurück zum Hauptartikel: [[Übersicht_der_Programmpunkte_für_Schulen|Übersicht der Programmpunkte für Schulen]] | → zurück zum Hauptartikel: [[Übersicht_der_Programmpunkte_für_Schulen|Übersicht der Programmpunkte für Schulen]] | ||
Aktuelle Version vom 27. Juni 2026, 10:40 Uhr

| Autor: | Prof. Dr.-Ing. Schneider |
| Workshop | |
| Schwerpunkt: | Programmierung, Microcontroller |
| Wo? | Schulen im Raum Lippstadt, Voraussetzungen vor Ort: Informatikraum mit PCs und Beamer, optional auch als Onlinekurs |
| Für wen? | Ab Klasse 9 |
Einstieg und Faszination für Mechatronik
Was damals als Experimentierprojekt für Elektronikbegeisterte begann, ist mittlerweile auch zur professionellen Lösung für industrielle Anwendungen geworden – der Microcontroller Arduino.
Im Workshop von Prof. Ulrich Schneider lernst Du in praktischen Versuchen das Programmieren des beliebten Microcontrollers. Vorkenntnisse sind nicht notwendig. Schritt für Schritt erklärt Dir Prof. Schneider den Arduino und seine Komponenten. Du wirst merken, Programmierung ist kein Hexenwerk.
- Einstieg in die Welt des Arduino
- Einlesen von Tastern und Sensoren
- Ansteuerung von LEDs und Motoren
- Tonausgabe über Lautsprecher
- Aufbau einfacher Schaltungen auf einem Steckbrett
| Uhrzeit | Inhalt | Dauer |
|---|---|---|
| 13:00 | Begrüßung | 5 Min. |
| 13:05 | Einführung Mikrocontroller | 5 Min. |
| 13:10 | Open Roberta Lab, "Hello World!" | 10 Min. |
| 13:20 | Blinkende LED (D13) | 10 Min. |
| 13:40 | Wechselblinker | 15 Min. |
| 13:55 | LED pulsieren lassen | 15 Min. |
| 14:10 | LED mit Potentiometer dimmen | 15 Min. |
| 14:25 | Verabschiedung | 5 Min. |
Motivation
Mikrocontroller sind in unserer modernen Welt überall etwas versteckt zu finden. Sie steuern Kaffeemaschinen, Lichtschalter, Staubsauger, Kühlschränke, Waschmaschinen bis hin zu Rasenmähern. Sie bewässern automatisch unsere Pflanzen und prüfen den Kalkgehalt unseres Wassers. Dieser Workshop gibt einen Einblick in die Funktion eines Mikrocontrollers am Beispiel der Plattform Arduino.
Was als Experimentierprojekt für Elektronikbegeisterte begann, ist mittlerweile zur professionellen Lösung für industrielle Anwendungen geworden – der Microcontroller Arduino. In praktischen Versuchen erlernst Du das Programmieren des beliebten Microcontrollers. Vorkenntnisse sind nicht notwendig – Schritt für Schritt erklären wir Dir den Arduino und seine Komponenten – und warum Programmierung kein Hexenwerk ist.
Software
Der Arduino lässt sich mir viele Entwicklungsumgebungen programmieren. Die einfachste Umgebung stellt das Open Roberta Lab bereit.
Vorbereitung des Labors
- Pro zweier Team einen PC mit USB-Eingang und Internetzugang
- Auf den PCs muss der Open Roberta Connector in der neuesten Version (1.6.8) und Java installiert sein.
- Download JRE 8u441: [1]
- Eine Anleitung gibt es hier.
- Die Seite Open Roberta Lab muss erreichbar sein, da wir mit dieser programmieren wollen.
- Dozenten-PC und Beamer für die visuelle Anleitung müssen verfügbar sein.
- 10x HSHL-Mechatronik-Baukasten
- 1x Multimeter
| Funktionstest: Hallo Welt! |
 |
Aufgabe 1: Blinkende LED


Auf dem Arduino ist an Pin 13 bereits eine LED eingebaut (siehe Abb. 3). Häufig blinkt diese Lampe schon, wenn man ein neues Arduino-Board anschließt, da das Blink-Programm zum Testen des Boards je nach Hersteller bereits vorab installiert ist. Wir werden dieses Blinken jetzt selbst programmieren.
- Roboterkonfiguration (LED an D13)
- In einer Schleife - LED einschalten, 1 s warten, LED ausschalten, 1 s warten,usw.
- Programm auf Arduino übertragen
| Einführung: Steckbrett |
 |
| Musterlösung |
  |
Aufgabe 2: Wechselblinker

Zwei Leuchtdioden sollen abwechselnd blinken. Blinkende Leuchten werden im Verkehr als Warnsignal an Fußgängerüberwegen und an Bahnübergängen eingesetzt (vgl. Abb. 6).
- Schalte eine LED mit Vorwiderstand über D8 gegen GND.
- Schalte eine LED mit Vorwiderstand über D7 gegen GND.
- Passe die Roboterkonfiguration entsprechend an.
- Schalte im Sekundentakt wechselnd eine LED an und die andere aus.
- Übertrage das Programm auf den Arduino.
Frage: Wieso hat die LED unterschiedlich lange Beine (vgl. Abb. 4)?
| Stückliste | |||||||||
|


| Schaltplan |
 |
| Musterlösung |
 |
Aufgabe 3: LED pulsieren lassen

Eine LED soll pulsierend heller und dunkler werden (engl. faden).
- Schalte eine LED mit Vorwiderstand über D6 gegen GND.
- Passe die Roboterkonfiguration entsprechend an (s. Abb. 12).
- Schicke Werte von 0..255 an die LED.
- Übertrage das Programm auf den Arduino.
- Bonus: Erweitern Sie Ihr Programm, so dass die LED abwechselnd heller und wieder dunkler wird.
| Stückliste | |||||||||
|
| Schaltplan |
 |
| Tipp 1 |
| Die LED benötigt einen 100 Ω Vorwiderstand, damit Sie nicht kaputt geht (Farbcode: Braun-Schwarz-Braun). |
| Das lange Beinchen der Diode ist Plus (+) und das Kurze Minus (-, GND). |
| Mit einer Pulsweitenmodulation (s. Abb. 10) lässt sich eine LED dimmen. |
| Die PWM-fähigen Ports sind mit ~ markiert. Wir nehmen Digitalport ~6. |
| Musterlösung |
  |
Aufgabe 4: LED mit Potentiometer dimmen
Eine LED soll gedimmt werden. Die Helligkeit soll mit einem Drehregler (Potentiometer) eingestellt werden.
Lerninhalt: Spannung eines Drehreglers auslesen, Sensorwerte mathematisch verarbeiten und für eine Ausgabe verwenden.
Ein Drehregler hat drei Anschlüsse. Außen wird rechts + und links – angeschlossen. Von dem mittleren Pin geht ein Kabel zu einem analogen Eingangspin am Mikrocontroller-Board. Wenn man den Drehregler dreht, dann gibt der mittlere Pin eine Spannung zwischen 0 und 5 Volt aus. Drehregler ganz links: 0 V und Drehregler ganz rechts: 5 V, bzw. seitenverkehrt, je nach Verkabelung. Der 10-Bit Analog-Digital-Wandler wandelt die gemessene Spannung in einen Wertebereich um.
- Schalte eine LED mit Vorwiderstand über D6 gegen GND.
- Schließe das Potentiometer an A0 an und Versorge es mit 5V.
- Passe die Roboterkonfiguration entsprechend an (s. Abb. 15).
- Messe die Eingangswerte des Potentiometers. Welchen Wertebereich hat A0?
- Rechne die Eingangswerte in die Ausgangswerte um.
- Schicke Werte von 0..255 an die LED.
- Übertrage das Programm auf den Arduino.
| Stückliste | ||||||||||||
|

| Schaltplan |
 |
| Tipp 1 |
| Die LED benötigt einen 100 Ω Vorwiderstand, damit Sie nicht kaputt geht (Farbcode: Braun-Schwarz-Braun). |
| Das lange Beinchen der Diode ist Plus (+) und das Kurze Minus (-, GND). |
| Mit einer Pulsweitenmodulation (s. Abb. 9) lässt sich eine LED dimmen. |
| Die PWM-fähigen Ports sind mit ~ markiert. Wir nehmen Digitalport ~6 (vgl. Abb. 134). |
| Das Potentiometer hat drei Beinchen: rechts (5 V), mitte (A0), links (GND) (vgl. Abb. 14). |
| Tipp 2 |
| Am Analogeingang A0 ist ein 10-Bit Analog-Digital-Wandler verbaut. 0 V wird zum Digitalwert 0 und 5 V zum Digitalwert 1023 (). |
| 0..1023 wird über die Division durch 4 ungefähr zum Wertebereich 0..255 für die PWM. |
| Musterlösung |
  |
Weiterführende Links
- Einstieg in die Welt des Arduino Uno R3
- Gäste-WLAN an der HSHL: DE/EN
Programm
| Programmübersicht |
|
|

Anreise
→ zurück zum Hauptartikel: Übersicht der Programmpunkte für Schulen