Winkerrätsel - Entschlüsselung der Signalcodes: Unterschied zwischen den Versionen
| (11 dazwischenliegende Versionen desselben Benutzers werden nicht angezeigt) | |||
| Zeile 318: | Zeile 318: | ||
Nachdem die SPI-Schnittstelle verbunden wurde, muss der LCD128x64-Bildschirm mit Strom versorgt werden. Der Bildschirm benötigt nicht nur Strom für das LCD-Modul und den Controller, sondern auch eine separate Stromversorgung für die Hintergrundbeleuchtung. | Nachdem die SPI-Schnittstelle verbunden wurde, muss der LCD128x64-Bildschirm mit Strom versorgt werden. Der Bildschirm benötigt nicht nur Strom für das LCD-Modul und den Controller, sondern auch eine separate Stromversorgung für die Hintergrundbeleuchtung. | ||
# Das LCD-Modul wird über die Pins '''GND (-)''' und '''VCC (+)''' mit 5V-Stromquelle versorgt. | # Das LCD-Modul wird über die Pins '''GND (-)''' und '''VCC (+)''' mit 5V-Stromquelle versorgt. | ||
# Die Hintergrundbeleuchtung wird über die Pins '''BLK (-)''' und '''BLA (+)''' mit 5V-Stromquelle versorgt. | # Die Hintergrundbeleuchtung wird über die Pins '''BLK (-)''' und '''BLA (+)''' mit 5V-Stromquelle versorgt. | ||
==== | |||
====AMDIS03B Webcam mit Raspberry Pi 5==== | |||
Im Schaltplan wird der USB-Anschluss nicht dargestellt, da er nicht direkt in der Schaltung verbunden werden kann. | Im Schaltplan wird der USB-Anschluss nicht dargestellt, da er nicht direkt in der Schaltung verbunden werden kann. | ||
# Verbinden Sie den USB-Anschluss der '''AMDIS03B Webcam''' direkt mit einem beliebigen USB 3.0-Port des '''Raspberry Pi 5'''. | # Verbinden Sie den USB-Anschluss der '''AMDIS03B Webcam''' direkt mit einem beliebigen USB 3.0-Port des '''Raspberry Pi 5'''. | ||
====Servo MG996R==== | |||
====Taste mit Raspberry Pi 5==== | |||
Basierend auf den Anforderungen dieses Projekts müssen zwei Tasten angeschlossen werden: | |||
Eine Taste dient zum Starten des Spiels, die andere zur Auswahl des Schwierigkeitsgrades. | |||
Da die Funktion der Tasten relativ einfach ist, sollten GPIO-Pins gewählt werden, die keine zusätzlichen Funktionen besitzen. Dies verhindert Portkonflikte und erleichtert die zukünftige Erweiterung für externe Geräte. | |||
# Die erste Taste wird mit einer Seite an den '''GPIO23''' des Raspberry Pi und mit der anderen Seite an '''GND''' angeschlossen. | |||
# Die zweite Taste wird mit einer Seite an den '''GPIO24''' des Raspberry Pi und mit der anderen Seite an '''GND''' angeschlossen. | |||
====LED mit Raspberry Pi 5==== | |||
Zu Beginn des Projekts wurde nicht berücksichtigt, dass das Spiel möglicherweise nicht ordnungsgemäß funktioniert, wenn sich der Spieler außerhalb des Kamerabereichs befindet. Um dieses Problem zu lösen, wurde eine auffällige rote LED hinzugefügt, die anzeigt, ob der Spieler außerhalb des Bereichs ist. | |||
Leuchtet die LED, bedeutet dies, dass der Spieler nicht im Bereich ist. Dieses Prinzip wird vor Spielbeginn über den LCD-Bildschirm in den Spielhinweisen erläutert. | |||
Beim Anschließen der LED muss sie mit einem GPIO verbunden werden, der keine zusätzlichen Funktionen hat. Außerdem ist aufgrund der geringen Vorwärtsimpedanz und des hohen Stromflusses einer LED ein geeigneter Vorwiderstand erforderlich. | |||
# Der positive Pol der LED wird mit dem GPIO16 des Raspberry Pi verbunden. | |||
# Ein 150Ω-Widerstand wird zwischen den negativen Pol der LED und GND geschaltet. | |||
====Servo MG996R mit Raspberry Pi 5==== | |||
Der Einsatz der MG996R-Servos ist zwar nicht Teil der aktuellen Projektanforderungen, jedoch wurden in der Hardwareverbindung bereits Anschlüsse für die Servos vorgesehen, um eine zukünftige Erweiterung zu ermöglichen. Falls zusätzliche Zeit zur Verfügung steht, soll ein doppelachsiges System aus zwei MG996R-Servos integriert werden, das mithilfe von PID-Regelung die Kamera in X- und Y-Richtung automatisch ausrichtet, um den Spieler optimal im Bild zu positionieren und die Spielerfahrung zu verbessern. | |||
# Der erste MG996R wird mit dem '''GPIO12''' des Raspberry Pi verbunden, da dieser Pin ein präzises Hardware-PWM-Signal erzeugen kann. | |||
# Der zweite MG996R wird mit dem '''GPIO13''' des Raspberry Pi verbunden, der ebenfalls ein präzises Hardware-PWM-Signal erzeugen kann. | |||
# Beide MG996R-Servos werden mit ihren VCC- und GND-Pins an eine 5V-Stromquelle angeschlossen. | |||
==== Stromversorgung für Raspberry Pi 5 und Peripheriegeräte ==== | |||
Da der Raspberry Pi 5 während des Betriebs einen hohen Strombedarf hat (mindestens 3A), wird eine Stromversorgung mit vier in Reihe geschalteten 3,7V-Akkus mit hoher Stromabgabe verwendet. Diese Akkus werden mit zwei MP1584-DC-DC-Abwärtswandlern kombiniert, um den Raspberry Pi 5 und die Peripheriegeräte separat mit Energie zu versorgen und einen stabilen Systembetrieb zu gewährleisten. | |||
# Der erste MP1584-DC-DC-Wandler versorgt über seine Ausgänge '''OUT+''' und '''OUT-''' das LCD128x64-Display und die Servos mit '''VCC''' und '''GND'''. | |||
# Der zweite MP1584-DC-DC-Wandler versorgt den Raspberry Pi 5, indem seine Ausgänge '''OUT+''' und '''OUT-''' mit den physischen Pins '''1 (VCC)''' und '''3 (GND)''' des Raspberry Pi 5 verbunden werden. | |||
= Umsetzung SW = | = Umsetzung SW = | ||
Version vom 24. November 2024, 17:41 Uhr
Autor: Benedikt Lipinski und Weiran Wang

Einleitung
Unter Flaggenwinken versteht man in der Nautik nicht das wilde Gestikulieren mit einer Fahne, sondern vielmehr ein komplexes System rein optischer Kommunikation. Während sich an Land schon früh die Kommunikation mittels optischer Telegrafie durchsetzte[1], wurde auch in der Schifffahrt die Kommunikation mittels Flaggenzeichen, den so genannten Semaphoren, immer populärer. Heute wird aufgrund der leistungsfähigen Funktechnik in der Regel nicht mehr mit Flaggen kommuniziert. Dennoch soll die Kommunikation via flaggen auch im Zeitalter der Elektronischen kommunikation zum Einsatz kommen, z.B. von der US Navy bei der Betankung von Schiff zu Schiff.[2]
Der Spieler soll nun selbst die Rolle eines Kommunikationspartners übernehmen und seinem Gegenüber (dem Spiel) eine geheime und verschlüsselte Nachricht zukommen lassen.
Theoretische Grundlagen
Flaggen Semaphore
Eine Kommunikation über Flaggen ist, anders als man auf den ersten Blick vermuten könnte, gar nicht so weit von der Kommunikation entfernt, die uns Studierenden der 2020er Jahren in den Informatikmodulen gelehrt wird[3]. Denn die in dem "Video 1" zusehende und für Menschen lesbare Codierung einzelner Flaggenpositionen ist nichts anderes als die Codierung von Zeichen in eine Bitfolge, nur dass sich an dieser Stelle die Codierung der Nachricht und das Transportprotokoll unterscheiden[4]. Die Kommunikation mit den Flaggen beginnt mit der Aufforderung zum Verbindungsaufbau (Attention #Anker:AttentionMessage).
| # | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | A | 
|
2 | B | 
|
3 | C | 
|
4 | D |
|
| 5 | E | 
|
6 | F | 
|
7 | G | 
|
8 | H | 
|
| 9 | I | 
|
10 | J | 
|
11 | K | 
|
12 | L | 
|
| 13 | M | 
|
14 | N | 
|
15 | O | 
|
16 | P | 
|
| 17 | Q | 
|
18 | R | 
|
19 | S | 
|
20 | T | 
|
| 21 | U | 
|
22 | V | 
|
23 | W | 
|
24 | X | 
|
| 25 | Y | 
|
26 | Z | 
|

Bestehende Arbeiten
Die Eingabe von Flaggensignalen in ein Computersystem ist nicht nur als Rätsel für ein Escape-Game interessant, sondern auch in anderen Projekten ein nicht zu vernachlässigender Faktor. Beispielsweise kann die Abbildung des Flaggenalphabets auf die Arme eines Benutzers dazu verwendet werden, Tastenanschläge auf der Tastatur zu simulieren. Ein Beispiel dafür ist das GitHub-Projekt des Entwicklers everythingishacked, der eine vollständige Tastatursimulation mit Hilfe von Handsemaphoren in Python umgesetzt hat[5]. Auch in der Mathematiksoftware Matlab gibt es bereits Beispiele für Vorstufen einer Armpositionserkennung[6] In beiden Fällen führt der Weg zur Buchstabenerkennung über den Schritt einer Schätzung der Körperhaltung. Konkret ist in diesem Fall die Ermittlung mittels Deep Learning Algorithmen gemeint.
Anforderungen
| ID | Inhalt | Erstellt von: | Erstellt am: | Geprüft von: | Geprüft am: | |
|---|---|---|---|---|---|---|
| 1 | System Anforderungen | |||||
| 1.1 | Das System muss eine Person durch bildbasierte Verfahren identifizieren. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.2 | Das System muss die Armhaltung erkennen. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.3 | Das System muss die Position der Arme in Winkel umwandeln. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.4 | Das System muss die Winkel in Buchstaben einteilen. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.5 | Das System muss eine Rückmeldung über den eingegebenen Buchstaben geben. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.6 | Das System muss eine Rückmeldung über die richtige Eingabe signalisieren, wenn der Buchstabe richtig angezeigt wird. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.7 | Das System muss bei korrekter Eingabe eine korrekte Stelle des Lösungswortes ausgeben. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.8 | Zur Erkennung der menschlichen Körperhaltung ist die Open-CV-Bibliothek zu verwenden. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.9 | Die verwendete Kamera muss eine Auflösung haben, bei der eine Person vollständig in das Bild passt. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.10 | Das Spiel soll per Knopfdruck oder über eine angeschlossene Tastatur gestartet werden. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.11 | Der Schwierigkeitsgrad muss über eine Taste oder eine angeschlossene Tastatur einstellbar sein. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.12 | Im Profi-Spielmodus sollen nicht nur Buchstaben, sondern auch kurze Wörter oder Zahlen eingegeben werden. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.13 | Im Profi-Spielmodus soll die bisherige Eingabe auf dem Bildschirm angezeigt werden. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.14 | Im Spielmodus Profi muss das Löschen der letzten Ziffer durch ein Flaggensignal möglich sein. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.15 | Das System soll nach Möglichkeit in Matlab realisiert werden; sollten gute Gründe gegen die Verwendung von Matlab sprechen, wird alternativ die Sprache Python verwendet. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 1.16 | Im Anfängermodus soll die spielende Person eine Hilfestellung erhalten | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 2 | Oganisatorische Anforderungen | |||||
| 2.1 | Das Rätsel soll nach Erklärung innerhalb von 5 Minuten lösbar sein. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 2.2 | Das Puzzle soll verschiedene Schwierigkeitsgrade haben. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 2.3 | Das Material zum Verständnis des Puzzles sollte in nicht-elektrischer Hardware vorhanden sein. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 | |
| 2.4 | Das System muss zur Aufbewahrung und zum Transport in einen Schuhkarton passen. | Benedikt Lipinski | 10.10.2024 | Weiran Wang | 10.10.2024 |
Funktionaler Systementwurf/Technischer Systementwurf
Funktionaler Systementwurf
Als Vorbereitung für das Winkerrätsel, zunächst durch die spielende Person, der Schwierigkeitsgrad gewählt werden. Das Spiel beginnt bei dem Winkerrätsel nicht mit dem drücken eines Startbuttons oder ähnlichem, sondern in Escape-Room Manier mit dem erkennen des Problems selbst. Hierzu bekommt die Spielende Person nach einstellen des Schwierigkeitsgrades, lediglich die 2 Flaggen und Literatur über Signale ausgehändigt. Somit ergibt sich als erste Aufgabe für die Spielenden, unter zu Hilfenahme der Flaggen zu erkenne, dass es sich bei der geforderten Aufgabe um das Winkeralphabet handelt. Mit der Erkenntnis aus der Literatur und der Tatsache, dass die spielende Person bereits unweigerlich Feedback zur erkannten Position bekommen wird, sollte durch die spielende Person kombiniert werden, nun mittels Körperposition
den erhaltenen Rätselcode einzugeben.
Die spielende Person wird aufgrund des grafischen Feedbacks schnell verstehen, dass bei korrekter Eingabe eines Buchstabens, dieser umcodiert wird.
Für den Spielmodus Profi, bei dem die spielende Person kleine Wörter aus der gängigen Sprache oder dem Internationalen Signal Kommunikation verwendet werden, bekommt die nutzende Person die bereits korrekt eingegebenen Buchstaben aufgelistet. Zudem wird der nutzenden Person aufgezeigt ob die eingegebene stelle korrekt oder falsch ist. Ziel ist es an dieser stelle, das Korrektur Signal zu benutzen.
Mit der erfolgreichen Entschlüsselung der letzten Stelle, hat die spielende Person das Rätsel beendet und sich innerhalb des gesamten Spiels Schritt für schritt das Lösungswort erspielt. An dieser stelle ist nun auch das Winkerrätsel beendet. Grundsätzlich stehen der spielenden Person 3 Spielmodi zur Verfügung. Leicht: hier soll eine visuelle Hilfestellung für die spielende Person gegeben werden, diese muss durch die spielende Person nur noch Nach gemacht werden.
Im fortgeschrittenen Modus muss die Spielende Person, sich nun selbst an die Einzunehmende Position erinnern oder im Buch nachschlagen. Eingegeben werden müssen in diesem Modus auch nur einzelne Buchstaben.
Der schwierigste Spielmodus, nur geeignet für Profis, fordert von der nutzenden Person die Eingabe kurzer Wörter, was gegebenen falls das Korrigieren der Eingabe nötig macht.
Der Ablauf des Winkerrätsels, wie er aus der Sicht des Anwenders dargestellt werden soll, kann dem Ablaufschema in Bild 2 entnommen werden.

Technischer Systementwurf
Da der im Arduino Uno R3 verwendete Atmega328-Mikrocontroller hinsichtlich Datenverarbeitung, RAM und Flash-Speicher begrenzt ist und somit für Bildverarbeitungsaufgaben ungeeignet, wird der Raspberry Pi 5B als Ersatz eingesetzt, um die Kernaufgaben der maschinellen Bildverarbeitung zu übernehmen. Das System wird über ein 5V 5A Netzteil mit Strom versorgt, um den stabilen Betrieb aller Geräte zu gewährleisten.
In diesem Flaggen-Signal-Interaktionssystem fungiert eine Kamera als Sensor, die über das USB-Protokoll Bilddaten an den Raspberry Pi 5B überträgt. Der Raspberry Pi 5B verwendet vordefinierte Algorithmen, um die von den Spielern eingegebenen Flaggen-Signale zu erkennen, und gibt Rückmeldungen über ein 128x64 Pixel Display aus. Das Display ist über das SPI-Protokoll mit dem Raspberry Pi 5B verbunden, um eine effiziente Datenübertragung sicherzustellen.
Darüber hinaus ist das System mit einem Moduswahlknopf ausgestattet, der an die GPIO-Pins des Raspberry Pi 5B angeschlossen ist. Durch Überwachung der Spannungsänderungen an den Pins kann das System die Benutzereingaben erkennen und verarbeiten.
Das gesamte System wird auf einer speziell angefertigten Leiterplatte integriert, um eine saubere und zuverlässige Verbindung der Leitungen sicherzustellen und das Gerät erfolgreich in ein Gehäuse von der Größe einer Schuhschachtel einzubauen.
Eine Gesamtübersicht über die beschriebenen Komponenten und ihre Verknüpfung ist in "Bild 3" dargestellt.

Material und Stückliste
| ID | Anzahl | Kosten pro Stück € | Summe | Bezeichnung / Komponente | technische Bezeichnung | Abbildung |
|---|---|---|---|---|---|---|
| 1 | 1x | 104,50€ | 104,50€ | RASP PI 5B 4GB mit Ladegerät und Gehäuse | RPI5 BBDL 4GB Das Raspberry PI 5 B 4GB Black Bundle |  |
| 2 | 1x | 0,2€ | 0,2€ | Kurzhubtaster | JTP-1130 Kurzhubtaster 6x6 mm, Höhe: 13 mm, 12 V, vert |  |
| 3 | 1x | 9,9€ | 9,9€ | LCD128X64 | DEBO LCD128X64 Entwicklerboards - Display Grafik-LCD, 128x64 Pixel |  |
| 4 | 1x | 14,95€ | 14,95€ | Webcam | AMDIS03B Webcam, 720p, HDready |  |
| 5 | 2x | 0 € | 0 € | Signalflaggen | Kleine Fahne 20 x 14 cm |  |
| 6 | 1x | 0€ | 0€ | Map mit Flaggensignalen | Flaggensprache oder Winkeralphabet |
 |
Komponentenspezifikation
Im Folgenden werden die Spezifikationen der für dieses Projekt verwendeten wichtigen Komponenten kurz erläutert.
Raspberry Pi 5
![Abb.??: Zusammensetzung der Hardware Raspberry Pi 5 [13]](/wiki/index.php/Datei:Hardware_Raspberry_Pi_5.jpg)
![Abb.??: Pin Belegung Raspberry Pi 5 [14]](/wiki/index.php/Datei:GPIO_Raspberry_Pi_5.png)
Prozessor:
- Der Raspberry Pi 5 verwendet den BCM2712-Prozessor, einen Quad-Core-ARM-Cortex-A76-Chip mit bis zu 2,4 GHz. Er ermöglicht das Betriebssystem und die Verarbeitung anspruchsvoller Aufgaben, wie z. B. Bildverarbeitung.
Schnittstellen:
- Der Raspberry Pi 5 bietet 40 Pins.
- Unterstützt Kommunikationsschnittstellen wie I2C, SPI und UART.
- Die Unterstützung von Hardware-PWM-Signalen.
- Ausgestattet mit 2x USB 3.0 und 2x USB 2.0.
- Die genaue Pin-Belegung ist in der Abbildung?? dargestellt.
Stromversorgung:
- Über den USB-C-Anschluss mit einer empfohlenen Versorgung von 5,1 V und einem Strom von 5 A.
- Alternativ über die VCC- und GND-Pins, die für integrierte Anwendungen nützlich sind.
AMDIS03B Webcam
-

Abbildung??: AMDIS03B Webcam

Schnittstellen:
- Verwendet eine standardmäßige USB-3.0-Schnittstelle.
Systemkompatibilität:
- Kompatibel mit verschiedenen Betriebssystemen (wie Windows, Linux, macOS usw.), keine zusätzlichen Treiber erforderlich, sofort einsatzbereit.
Auflösungsunterstützung:
- Unterstützt eine Auflösung von bis zu 1080P (Full HD).
LCD 128x64
-

Abbildung??: Hauptcontoller ST7920
-
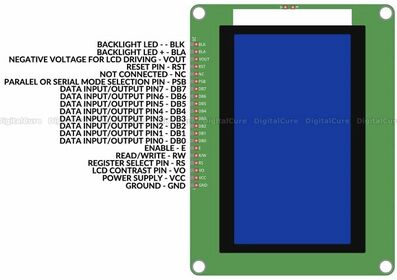
Abbildung??: Pin Belegng LCD 128x64


Display-Typ:
- Monochromes LCD mit einer Auflösung von 128x64 Pixeln.
- Unterstützt sowohl grafische als auch alphanumerische Darstellung.
Controller:
- Ausgestattet mit dem ST7920-Controller.
Betriebsspannung:
- Betriebsspannung: 5V DC.
Kommunikationsschnittstellen:
- 8-Bit-Parallel-Modus.
- Serieller SPI-Modus.(die entsprechenden Pins sind in der Abbildung als RS (CS), RW (MOSI) und E (SCK) gekennzeichnet)
- Der Pin PSB ist für die Auswahl des Kommunikationsmodus verantwortlich. Bei einem Low-Pegel wird SPI aktiviert, bei einem High-Pegel erfolgt die parallele Kommunikation.
Servo MG996R
-

Abbildung??: MG996R Servo

Servo Typ:
- Standardgröße Digitalservo
Drehbereich:
- 0° bis 180°
Steuersignal:
- PWM-Signal
- Pulsweiten zwischen 500 µs bis 2500 µs, entsprechend einem Drehbereich von 0° bis 180°.
Betriebsspannung:
- 4,8 V bis 7,2 V
Umsetzung HW
Visualisierung der Hardwareverbindung
-
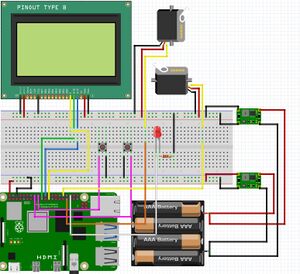
Abildung 1: Verkabelungsplan
-
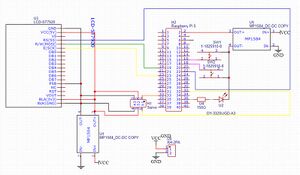
Abildung 2: Schaltplan
-
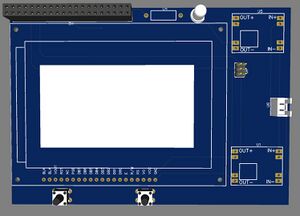
Abildung 3: PCB



Die obigen drei Abbildungen zeigen:
- Wie ein Modell auf einem Breadboard schnell aufgebaut werden kann.
- Die Verbindungen zwischen den Pins.
- Das spätere 3D-Modell, das erstellt werden soll.
Beschreibung der Hardwareverbindung
LCD128x64 mit Raspberry Pi 5
Die Hardwareverbindung basiert auf den in der Komponentenspezifikation beschriebenen Eigenschaften. Als erstes wird die Verbindung des wichtigsten Hardwareelements, dem LCD-Bildschirm, hergestellt. Da sowohl der LCD-Bildschirm als auch der Raspberry Pi die Hardware-SPI-Schnittstelle unterstützen, wird SPI-Kommunikation gewählt. Im Vergleich zur parallelen Kommunikation reduziert SPI die Verkabelungskomplexität erheblich und vermeidet die Verschwendung von GPIO-Ressourcen.
- Der digitale Pin GPIO25 des Raspberry Pi 5 wird als Chip-Select-Pin verwendet und mit dem Chip-Select-Pin RS des LCD-Bildschirms verbunden. GPIO25 wurde gewählt, da es lediglich als I/O-Pin verwendet wird und keine anderen Funktionen erfüllt.
- Der SPI-Daten-Pin GPIO19 (MOSI) des Raspberry Pi wird mit dem RW (MOSI)-Pin des LCD-Bildschirms verbunden.
- Der SPI-Takt-Pin GPIO23 (SCK) des Raspberry Pi wird mit dem E (SCK)-Pin des LCD-Bildschirms verbunden.
- Der PSB-Pin des LCD-Bildschirms wird mit GND verbunden, um den Pegel auf Low zu setzen und damit die SPI-Kommunikation zu aktivieren.
Nachdem die SPI-Schnittstelle verbunden wurde, muss der LCD128x64-Bildschirm mit Strom versorgt werden. Der Bildschirm benötigt nicht nur Strom für das LCD-Modul und den Controller, sondern auch eine separate Stromversorgung für die Hintergrundbeleuchtung.
- Das LCD-Modul wird über die Pins GND (-) und VCC (+) mit 5V-Stromquelle versorgt.
- Die Hintergrundbeleuchtung wird über die Pins BLK (-) und BLA (+) mit 5V-Stromquelle versorgt.
AMDIS03B Webcam mit Raspberry Pi 5
Im Schaltplan wird der USB-Anschluss nicht dargestellt, da er nicht direkt in der Schaltung verbunden werden kann.
- Verbinden Sie den USB-Anschluss der AMDIS03B Webcam direkt mit einem beliebigen USB 3.0-Port des Raspberry Pi 5.
Taste mit Raspberry Pi 5
Basierend auf den Anforderungen dieses Projekts müssen zwei Tasten angeschlossen werden: Eine Taste dient zum Starten des Spiels, die andere zur Auswahl des Schwierigkeitsgrades. Da die Funktion der Tasten relativ einfach ist, sollten GPIO-Pins gewählt werden, die keine zusätzlichen Funktionen besitzen. Dies verhindert Portkonflikte und erleichtert die zukünftige Erweiterung für externe Geräte.
- Die erste Taste wird mit einer Seite an den GPIO23 des Raspberry Pi und mit der anderen Seite an GND angeschlossen.
- Die zweite Taste wird mit einer Seite an den GPIO24 des Raspberry Pi und mit der anderen Seite an GND angeschlossen.
LED mit Raspberry Pi 5
Zu Beginn des Projekts wurde nicht berücksichtigt, dass das Spiel möglicherweise nicht ordnungsgemäß funktioniert, wenn sich der Spieler außerhalb des Kamerabereichs befindet. Um dieses Problem zu lösen, wurde eine auffällige rote LED hinzugefügt, die anzeigt, ob der Spieler außerhalb des Bereichs ist. Leuchtet die LED, bedeutet dies, dass der Spieler nicht im Bereich ist. Dieses Prinzip wird vor Spielbeginn über den LCD-Bildschirm in den Spielhinweisen erläutert.
Beim Anschließen der LED muss sie mit einem GPIO verbunden werden, der keine zusätzlichen Funktionen hat. Außerdem ist aufgrund der geringen Vorwärtsimpedanz und des hohen Stromflusses einer LED ein geeigneter Vorwiderstand erforderlich.
- Der positive Pol der LED wird mit dem GPIO16 des Raspberry Pi verbunden.
- Ein 150Ω-Widerstand wird zwischen den negativen Pol der LED und GND geschaltet.
Servo MG996R mit Raspberry Pi 5
Der Einsatz der MG996R-Servos ist zwar nicht Teil der aktuellen Projektanforderungen, jedoch wurden in der Hardwareverbindung bereits Anschlüsse für die Servos vorgesehen, um eine zukünftige Erweiterung zu ermöglichen. Falls zusätzliche Zeit zur Verfügung steht, soll ein doppelachsiges System aus zwei MG996R-Servos integriert werden, das mithilfe von PID-Regelung die Kamera in X- und Y-Richtung automatisch ausrichtet, um den Spieler optimal im Bild zu positionieren und die Spielerfahrung zu verbessern.
- Der erste MG996R wird mit dem GPIO12 des Raspberry Pi verbunden, da dieser Pin ein präzises Hardware-PWM-Signal erzeugen kann.
- Der zweite MG996R wird mit dem GPIO13 des Raspberry Pi verbunden, der ebenfalls ein präzises Hardware-PWM-Signal erzeugen kann.
- Beide MG996R-Servos werden mit ihren VCC- und GND-Pins an eine 5V-Stromquelle angeschlossen.
Stromversorgung für Raspberry Pi 5 und Peripheriegeräte
Da der Raspberry Pi 5 während des Betriebs einen hohen Strombedarf hat (mindestens 3A), wird eine Stromversorgung mit vier in Reihe geschalteten 3,7V-Akkus mit hoher Stromabgabe verwendet. Diese Akkus werden mit zwei MP1584-DC-DC-Abwärtswandlern kombiniert, um den Raspberry Pi 5 und die Peripheriegeräte separat mit Energie zu versorgen und einen stabilen Systembetrieb zu gewährleisten.
- Der erste MP1584-DC-DC-Wandler versorgt über seine Ausgänge OUT+ und OUT- das LCD128x64-Display und die Servos mit VCC und GND.
- Der zweite MP1584-DC-DC-Wandler versorgt den Raspberry Pi 5, indem seine Ausgänge OUT+ und OUT- mit den physischen Pins 1 (VCC) und 3 (GND) des Raspberry Pi 5 verbunden werden.
Umsetzung SW
-

Abb.??: Raspberry Pi 5 Start

Betriebssysteminstallation:
- Bei der ersten Nutzung des Raspberry Pi 5 muss ein Betriebssystem installiert werden. Benutzer können das offizielle Tool Raspberry Pi Imager herunterladen und das empfohlene Betriebssystem Raspberry Pi OS auswählen. Dieses wird auf eine MicroSD-Karte geschrieben, die anschließend in den Raspberry Pi eingesetzt wird, um die Installation abzuschließen.
- Nach erfolgreicher Installation zeigt die Abbildung die Benutzeroberfläche des Betriebssystems, die für Desktop-Anwendungen, Programmierung und Hardwaresteuerung verwendet werden kann.
Ansatz

Da die Position der Arme beim Flaggenwinken in feste Bereiche mit einer festen Ausrichtung eingeteilt werden kann, ist die Idee, die Position der Arme mit grafischen oder geometrischen Verfahren zu bestimmen. Die Idee ist, die Ausrichtung des Armes zur Körpermitte mit graphischen beziehungsweise geometrischen Methoden zu bestimmen.
Komponententest
Ergebnis
Fehler
Zusammenfassung
Lessons Learned
Projektunterlagen
Projektplan
Projektdurchführung
YouTube Video
Quellen
→ zurück zur Übersicht: WS 24/25: Escape Game
- ↑ SELLERI, Stefano, 2017. Claude Chappe and the first telecommunication network (without electricity). URSI Radio Science Bulletin [online]. März 2017. Bd. 2017, Nr. 360, S. 96–101. [Zugriff am: 1 Oktober 2024]. DOI 10.23919/URSIRSB.2017.8113174. Verfügbar unter: https://ieeexplore.ieee.org/document/8113174/?arnumber=8113174
- ↑ Navy Seaman Ryan Ruona uses semaphore flags to signal another ship., [kein Datum]. [online]. [Zugriff am: 1 Oktober 2024]. Verfügbar unter: https://www.defense.gov/Multimedia/Photos/igphoto/2001244016/
- ↑ Codierung von Texten - Fakultät für Elektrotechnik, Informatik und Mathematik - Fakultäten - Kategorien - Videoportal der Uni Paderborn, [kein Datum]. [online]. [Zugriff am: 1 Oktober 2024]. Verfügbar unter: https://videos.uni-paderborn.de/category/video/codierung-von-texten/3a9cfca393633045f308a88c20e8ad82/7
- ↑ Education Codes and Communication, [kein Datum]. National Museum of the Marine Corps [online]. [Zugriff am: 1 Oktober 2024]. Verfügbar unter: https://www.usmcmuseum.com/uploads/6/0/3/6/60364049/nmmc_semaphore_flag_booklet_final_1.pdf
- ↑ EVERYTHINGISHACKED, [kein Datum]. Semaphore [online]. Verfügbar unter: https://github.com/everythingishacked/Semaphore
- ↑ Estimate Body Pose Using Deep Learning - MATLAB & Simulink - MathWorks Deutschland, [kein Datum]. [online]. [Zugriff am: 2 Oktober 2024]. Verfügbar unter: https://de.mathworks.com/help/deeplearning/ug/estimate-body-pose-using-deep-learning.html
- ↑ Raspberry Pi 5 Gruppe., [kein Datum]. [online]. [Zugriff am: 11 Oktober 2024]. Verfügbar unter:https://www.reichelt.de/das-raspberry-pi-5-b-4gb-black-bundle-rpi5-bbdl-4gb-p362101.html?&nbc=1&trstct=lp_1358_155298
- ↑ Kurzhubtaster 6x6 mm, [kein Datum]. [online]. [Zugriff am: 11 Oktober 2024]. Verfügbar unter:https://www.reichelt.de/kurzhubtaster-6x6-mm-hoehe-13-mm-12-v-vert--jtp-1130-p27894.html?&trstct=pos_0&nbc=1
- ↑ LCD128X64, [kein Datum]. [online]. [Zugriff am: 11 Oktober 2024]. Verfügbar unter:https://www.reichelt.de/entwicklerboards-display-grafik-lcd-128x64-pixel-debo-lcd128x64-p335007.html?&trstct=pos_0&nbc=1
- ↑ CON AMDIS03B Webcam, [kein Datum]. [online]. [Zugriff am: 11 Oktober 2024]. Verfügbar unter:https://www.reichelt.de/webcam-720p-hdready-con-amdis03b-p292005.html?&trstct=pos_7&nbc=1CON
- ↑ Deutschland Flagge, [kein Datum]. [online]. [Zugriff am: 11 Oktober 2024]. Verfügbar unter:https://www.amazon.de/molinoRC-Deutschland-Fahne-Stockfahne-Kinder-Fahne-Deutschland-Flagge/dp/B079SL8MRD
- ↑ Flaggensignale, [kein Datum]. [online]. [Zugriff am: 11 Oktober 2024]. Verfügbar unter:https://www.irisluckhaus.de/2016/infografik-flaggensprache/
- ↑ Technische Daten des Raspberry PI 5, [kein Datum]. [online]. [Zugriff am: 23 November 2024]. Verfügbar unter: https://www.nerdsheaven.de/raspberry-pi-5/
- ↑ Raspberry Pi hardware - Raspberry Pi Documentation, [kein Datum]. [online]. [Zugriff am: 23 November 2024]. Verfügbar unter: https://www.raspberrypi.com/documentation/computers/raspberry-pi.html