Sensor-/Aktortest BSF längs: Unterschied zwischen den Versionen
Eigenen Test ergänzt, Kopierfehler behoben, SVN Revisionen aktualisiert, Testbeschreibung entfernt |
Beschreibung S-Funktion get_direction ergänzt |
||
| Zeile 21: | Zeile 21: | ||
Datei: Gierratensensor ControlDesk.PNG| Gierratensensor | Datei: Gierratensensor ControlDesk.PNG| Gierratensensor | ||
</gallery> | </gallery> | ||
== Test Beschleunigung für Hall-Test == | |||
Um die Geschwindigkeitsbestimmung mithilfe der Hallsensoren zu durchzuführen, muss in Control Desk 7.1 manuell die Puls Modulation Breite des Antriebmotors eingestellt werden. | |||
Anfang des Wintersemesters 23/24 funktioniert das manuelle Ansteuern mit der aktuellen Software der Revision 9142 nicht! | |||
Der Wiki-Artikel [[Hall-Sensor]] beschreibt die Funktionsweise der Richtungsbestimmung und [[Softwarearchitektur des Fahrzeugs]] die Implementation. | |||
Daher wird im Folgenden der Quellcode der S-Funktion "get_direction" zur Richtungsbestimmung mit den Hallsensoren bzw. Taktflanken dieser analysiert: | |||
=== Quellcode der S-Funktion get_direction === | |||
<div class="mw-collapsible mw-collapsed"> | |||
<syntaxhighlight lang="c++"> | |||
// CASES: | |||
// | |||
// A B C CaseNum | |||
// 1 0 1 1 | |||
// 1 0 0 2 | |||
// 1 1 0 3 | |||
// 0 1 0 4 | |||
// 0 1 1 5 | |||
// 0 0 1 6 | |||
#define FORWARD 1 | |||
#define BACKWARD 0 | |||
static int last_case = 0; | |||
static int last_dir = FORWARD; | |||
int state; | |||
int case_num = 0; | |||
state = 0; | |||
if(HALL_A[0]>0){ | |||
state +=100; | |||
} | |||
if(HALL_B[0]>0){ | |||
state+=10; | |||
} | |||
if(HALL_C[0]>0){ | |||
state+=1; | |||
} | |||
switch(state){ | |||
case 101: | |||
case_num = 1; | |||
break; | |||
case 100: | |||
case_num = 2; | |||
break; | |||
case 110: | |||
case_num = 3; | |||
break; | |||
case 10: | |||
case_num = 4; | |||
break; | |||
case 11: | |||
case_num = 5; | |||
break; | |||
case 1: | |||
case_num = 6; | |||
break; | |||
default: | |||
break; | |||
} | |||
//Case: Forward Wrap-Around 6->1 | |||
if(case_num == 1 && last_case == 6){ | |||
direction[0] = FORWARD; | |||
last_dir = FORWARD; | |||
//Case: Backward Wrap-Around 1->6 | |||
}else if(case_num == 6 && last_case == 1){ | |||
direction[0] = BACKWARD; | |||
last_dir = BACKWARD; | |||
//Case: Forward 1->2 .. 5->6 | |||
}else if(case_num > last_case){ | |||
direction[0] = FORWARD; | |||
last_dir = FORWARD; | |||
//Case: Backward 6->5 .. 2->1 | |||
}else if(case_num < last_case){ | |||
direction[0] = BACKWARD; | |||
last_dir = BACKWARD; | |||
//Case: No change | |||
}else if(case_num == last_case){ | |||
direction[0] = last_dir; | |||
} | |||
current_state[0] = case_num; | |||
//save current case number | |||
last_case = case_num; | |||
</syntaxhighlight> | |||
</div> | |||
== Beschreibung der S-Funktion get_direction == | |||
Die Funktion fragt jeden Sampleschritt den Zustand der digitalen Eingänge C2, C3 und C4 ab. Die Hallsensoren sind so angeordnet, | |||
dass die HIGH und LOW Flanken der Hallsensoren gestaffelt hintereinander erzeugt werden. | |||
Durch die Bestimmung der Reihenfolge der Flanken kann die Fahrtrichtung des CCF ermittelt werden. | |||
Dafür werden die sechs möglichen Zustände definiert, die über eine Switch Case Verzweigung abgefragt werden. | |||
Weitere Ergebnisse werden im [[https://svn.hshl.de/svn/MTR_SDE_Praktikum/trunk/Dokumentation/Taetigkeitsbericht/Vorlage/Excel-Tool_Problemloesungsblatt.xlsx|Problemloesungsblatt]] erläutert. | |||
== Beispiel: Test der Sensoren und Aktoren des Fahrzeugs == | == Beispiel: Test der Sensoren und Aktoren des Fahrzeugs == | ||
| Zeile 45: | Zeile 148: | ||
|- | |- | ||
|} | |} | ||
===Testfälle=== | ===Testfälle=== | ||
Aktuelle Version vom 10. Oktober 2023, 09:40 Uhr
Autoren: Tim Schonlau, Xiangyao Liu,Yuhan Pan
Vorlage von: Lukas Honerlage, Noah Greis, Jonas Hokamp
Einleitung
Dieser Artikel beschäftigt sich mit dem Sensor-/Aktortest für das Carolo Cup Fahrzeug. Für den Test liegt ein Simulink-Modell vor, welches als Grundlage für das ControlDesk-Projekt dient. Sämtliche Sensorwerte sind somit in ControlDesk sichtbar und alle Aktoren ansteuerbar. Vor einer Inbetriebnahme des Fahrzeuges sollten sämtliche Prüfschritte durchlaufen und in dem entsprechenden Prüfprotokoll dokumentiert werden.
Simulink-Modell (SVN Revision 9139)

ControlDesk-Oberfläche
-
 Lichtsteuerung
Lichtsteuerung -
 Tasterabfrage
Tasterabfrage -
 Gas & Lenkung
Gas & Lenkung -
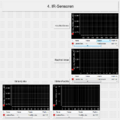 IR-Sensore
IR-Sensore -
 Fernbedienungssignale
Fernbedienungssignale -
 Gierratensensor
Gierratensensor





Test Beschleunigung für Hall-Test
Um die Geschwindigkeitsbestimmung mithilfe der Hallsensoren zu durchzuführen, muss in Control Desk 7.1 manuell die Puls Modulation Breite des Antriebmotors eingestellt werden. Anfang des Wintersemesters 23/24 funktioniert das manuelle Ansteuern mit der aktuellen Software der Revision 9142 nicht! Der Wiki-Artikel Hall-Sensor beschreibt die Funktionsweise der Richtungsbestimmung und Softwarearchitektur des Fahrzeugs die Implementation.
Daher wird im Folgenden der Quellcode der S-Funktion "get_direction" zur Richtungsbestimmung mit den Hallsensoren bzw. Taktflanken dieser analysiert:
Quellcode der S-Funktion get_direction
// CASES:
//
// A B C CaseNum
// 1 0 1 1
// 1 0 0 2
// 1 1 0 3
// 0 1 0 4
// 0 1 1 5
// 0 0 1 6
#define FORWARD 1
#define BACKWARD 0
static int last_case = 0;
static int last_dir = FORWARD;
int state;
int case_num = 0;
state = 0;
if(HALL_A[0]>0){
state +=100;
}
if(HALL_B[0]>0){
state+=10;
}
if(HALL_C[0]>0){
state+=1;
}
switch(state){
case 101:
case_num = 1;
break;
case 100:
case_num = 2;
break;
case 110:
case_num = 3;
break;
case 10:
case_num = 4;
break;
case 11:
case_num = 5;
break;
case 1:
case_num = 6;
break;
default:
break;
}
//Case: Forward Wrap-Around 6->1
if(case_num == 1 && last_case == 6){
direction[0] = FORWARD;
last_dir = FORWARD;
//Case: Backward Wrap-Around 1->6
}else if(case_num == 6 && last_case == 1){
direction[0] = BACKWARD;
last_dir = BACKWARD;
//Case: Forward 1->2 .. 5->6
}else if(case_num > last_case){
direction[0] = FORWARD;
last_dir = FORWARD;
//Case: Backward 6->5 .. 2->1
}else if(case_num < last_case){
direction[0] = BACKWARD;
last_dir = BACKWARD;
//Case: No change
}else if(case_num == last_case){
direction[0] = last_dir;
}
current_state[0] = case_num;
//save current case number
last_case = case_num;
Beschreibung der S-Funktion get_direction
Die Funktion fragt jeden Sampleschritt den Zustand der digitalen Eingänge C2, C3 und C4 ab. Die Hallsensoren sind so angeordnet, dass die HIGH und LOW Flanken der Hallsensoren gestaffelt hintereinander erzeugt werden. Durch die Bestimmung der Reihenfolge der Flanken kann die Fahrtrichtung des CCF ermittelt werden.
Dafür werden die sechs möglichen Zustände definiert, die über eine Switch Case Verzweigung abgefragt werden.
Weitere Ergebnisse werden im [[1]] erläutert.
Beispiel: Test der Sensoren und Aktoren des Fahrzeugs
Autor: Tim Schonlau, Xiangyao Liu,Yuhan Pan
Betreuer: Prof. Schneider, Prof. Göbel, Marc Ebmeyer
SVN Version
Für die Durchführung der Testfällen habe ich folgende SVN Version verwendet.
| Software | File Revision | by |
|---|---|---|
| Matlab Datei: start.m | 8811 | Mirek Goebel |
| Simulink Modell: CCF_online_SensorAktorTest.slx | 9117 | Mirek Goebel |
| ControlDesk Projekt: Test der Sensor und Aktoren | 8851 | Mirek Goebel |
Testfälle
Die ausführlichen Tabellen zu den Testfällen lassen sich mit Klick auf den Button "Ausklappen" anzeigen
Testfall 1
Bezeichnung: Simulink-Modell für den Sensor-/Aktortest builden
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: Simulink 10.0 (Matlab 2019b)
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Fahrzeug versorgen | Fahrzeug ist nicht mit Stromversorgung angeschlossen | Kabel anschließen | Anweisungslicht für Stromversorgung leuchtet | Anweisungslicht für Stromversorgung leuchtet | i.O | - |
| Vorbedingung 2 | Akkus einlegen und anschließen | Akkus sind in der Aufbewahrungskiste | Akkus ins Fahrzeug einlegen und anschließen | die Akkus sind korrekt angeschlossen | die Akkus sind korrekt angeschlossen | i.O | - |
| Vorbedingung 3 | Motorschalter nach rechts machen | Motorschalter bleibt links | Motorschalter nach rechts bringen | Motorschalter ist nach rechts gebracht | Motorschalter ist nach rechts gebracht | i.O | - |
| Vorbedingung 4 | PC vom Fahrzeug hochfahren und anmelden | PC ist aus | Knopf "PC ein" drücken und mit .\hshl-user anmelden | PC ist hochgefahren | PC ist hochgefahren | i.O | - |
| Vorbedingung 5 | Fahrzeug aufbocken | Fahrzeug auf die Bücher | Stelle des Fahrzeugs einstellen | Reifen sind freilaufend | Reifen sind freilaufend | i.O | - |
| Testschritt 1 | start.m öffnen | Matlab ist nicht geöffnet | start.m aktualisieren und öffnen | start.m ist geöffnet | start.m ist geöffnet | i.O | - |
| Testschritt 2 | start.m ausführen | Parameter "Schalter_offline" auf 0 | Parameter "Schalter_offline" auf 2 stellen und "Run" drücken | das Simulink Modell CCF_online_SensorAktorTest.slx geöffnet | das Simulink Modell CCF_online_SensorAktorTest.slx geöffnet | i.O | - |
| Testschritt 3 | Modell builden | Simulink Modell CCF_online_SensorAktorTest.slx ist geöffnet | das geöffnete Simulink Modell builden (strg+B) | ohne Fehler gebuildet | ohne Fehler gebuildet | i.O | - |
Testfall 2
Bezeichnung: ccf_online_sensoraktortest.sdf-Datei in ControlDesk Projekt laden
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 1 erfolgreich durchgeführt | - | - | ccf_online_sensoraktortest.sdf erzeugt | ccf_online_sensoraktortest.sdf erzeugt | i.O | Der erzeugte .sdf-Datei ist in Ordner "CaroloCupFahrzeug" |
| Testschritt 1 | in ControllDesk das Projekt "Test der Sensoren und Aktoren" öffnen | ControllDesk ist nicht geöffnet | ControllDesk öffnen, dann Projekt öffnen | das projekt "Test der Sensoren und Aktoren" ist geöffnet | das projekt "Test der Sensoren und Aktoren" ist geöffnet | i.O | - |
| Testschritt 2 | ccf_online_sensoraktortest.sdf im Projekt laden | Projekt geöffnet | ccf_online_sensoraktortest.sdf neu laden | Der geladene .sdf-Datei hat ein aktuelles Erstelldatum | Der geladene .sdf-Datei hat ein aktuelles Erstelldatum | i.O | - |
Testfall 3
Bezeichnung: LED-Blinker links
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Der geladene .sdf-Datei hat ein aktuelles Erstelldatum | Der geladene .sdf-Datei hat ein aktuelles Erstelldatum | i.O | - |
| Vorbedingung 2 | Messung start | der aktuelle .sdf-Datei neu geladet | Online gehen und Messung start | Die Live-Werte werden angezeigt | Die Live-Werte werden nicht angezeigt | n.i.O | Die Signale werden manuell ins entsprechende Fenster gezogen |
| Vorbedingung 3 | Fernbedienung einschalten | Fernbedienung ist ausgeschaltet | Fernbedienung wird eingeschaltet | Anweisungslicht für Power leuchtet | Anweisungslicht für Power leuchtet | i.O | - |
| Testschritt 1 | LED-Blinker links mit ControlDesk | Die Blinker an der linken Fahrzeugseite sind aus. | Betätigen des entsprechenden Buttons in ControlDesk auf "an" | Die Blinker an der linken Fahrzeugseite leuchten | Die Blinker an der linken Fahrzeugseite leuchten | i.O | - |
| Testschritt 2 | LED-Blinker links mit ControlDesk | Die Blinker an der linken Fahrzeugseite leuchten | Betätigen des entsprechenden Buttons in ControlDesk auf "aus" | Die Blinker an der linken Fahrzeugseite aus | Die Blinker an der linken Fahrzeugseite aus | i.O | - |
| Testschritt 3 | LED-Blinker links mit Fernbedingung | Die Blinker an der linken Fahrzeugseite sind aus. | Mit der Fernbedienung nach Links lenken | Die Blinker an der linken Fahrzeugseite blinken | Die Blinker an der linken Fahrzeugseite blinken | i.O | - |
Testfall 4
Bezeichnung: LED-Blinker rechts
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | LED-Blinker rechts mit ControlDesk | Die Blinker an der rechten Fahrzeugseite sind aus. | Betätigen des entsprechenden Buttons in ControlDesk auf "an" | Die Blinker an der rechten Fahrzeugseite leuchten | Die Blinker an der rechten Fahrzeugseite leuchten | i.O | - |
| Testschritt 2 | LED-Blinker rechts mit ControlDesk | Die Blinker an der rechten Fahrzeugseite leuchten | Betätigen des entsprechenden Buttons in ControlDesk auf "aus" | Die Blinker an der rechten Fahrzeugseite aus | Die Blinker an der rechten Fahrzeugseite aus | i.O | - |
| Testschritt 3 | LED-Blinker rechts mit Fernbedingung | Die Blinker an der rechten Fahrzeugseite sind aus. | Mit der Fernbedienung nach Rechts lenken | Die Blinker an der rechten Fahrzeugseite blinken | Die Blinker an der rechten Fahrzeugseite blinken | i.O | - |
Testfall 5
Bezeichnung: LED Bremsenlichter
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | LED Bremsenlichter mit ControlDesk | Die LED Bremsenlichter am hinteren Fahrzeugteil sind aus | Betätigen des entsprechenden Buttons in ControlDesk auf "an" | Die LED Bremsenlichter leuchten | Die LED Bremsenlichter leuchten | i.O | - |
| Testschritt 2 | LED Bremsenlichter mit ControlDesk | Die LED Bremsenlichter am hinteren Fahrzeugteil leuchten | Betätigen des entsprechenden Buttons in ControlDesk auf "aus" | Die LED Bremsenlichter sind aus | Die LED Bremsenlichter sind aus | i.O | - |
| Testschritt 3 | LED Bremsenlichter mit Fernbedingung | Die LED Bremsenlichter am hinteren Fahrzeugteil sind aus. | Mit der Fernbedienung bremsen | Die LED Bremsenlichter bleiben aus | Die LED Bremsenlichter bleiben aus | n.i.O | - |
Testfall 6
Bezeichnung: LED Rückfahrlichter
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | LED Rückfahrlichter mit ControlDesk | Die LED Bremsenlichter am hinteren Fahrzeugteil leuchten | Betätigen des entsprechenden Buttons in ControlDesk auf "aus" | Die LED Bremsenlichter bleiben ein | Die LED Bremsenlichter bleiben ein | n.i.O | Rückfahrlicht aktuell nicht funktionsfähig |
| Testschritt 2 | LED Bremsenlichter mit Fernbedingung | Die LED Bremsenlichter am hinteren Fahrzeugteil sind ein. | Mit der Fernbedienung rückwärts fahren | Die LED Bremsenlichter bleiben ein | Die LED Bremsenlichter bleiben ein | n.i.O | Rückfahrlicht aktuell nicht funktionsfähig |
Testfall 7
Bezeichnung: Blaulicht
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Blaulicht mit ControlDesk | Das Blaulicht an der Kamera leuchtet | Betätigen des entsprechenden Buttons in ControlDesk auf "aus" | Das Blaulicht aus | Das Blaulicht aus | i.O | - |
| Testschritt 2 | Blaulicht mit ControlDesk | Das Blaulicht an der Kamera ist aus | Betätigen des entsprechenden Buttons in ControlDesk auf "an" | Das Blaulicht leuchtet | Das Blaulicht leuchtet | i.O | - |
Testfall 8
Bezeichnung: Taster AEP (Einpackalgorithmus starten)
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Taster AEP mit ControlDesk | Der Wert des Tasters AEP wird in ControlDesk als 1 angezeigt | das Taster AEP am hinteren Teil des Autos drücken | Der Wert des Tasters AEP wird in ControlDesk als 0 angezeigt | Der Wert des Tasters AEP wird in ControlDesk als 0 angezeigt | i.O | - |
| Testschritt 2 | Blaulicht mit ControlDesk | Der Wert des Tasters AEP wird in ControlDesk als 0 angezeigt | das Taster AEP am hinteren Teil des Autos nicht drücken | Der Wert des Tasters AEP wird in ControlDesk als 1 angezeigt | Der Wert des Tasters AEP wird in ControlDesk als 1 angezeigt | i.O | - |
Testfall 9
Bezeichnung: Taster BSFoH
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Taster BSFoH mit ControlDesk | Der Wert des Tasters BSFoH wird in ControlDesk als 1 angezeigt | das Taster BSFoH am hinteren Teil des Autos drücken | Der Wert des Tasters BSFoH wird in ControlDesk als 0 angezeigt | Der Wert des Tasters BSFoH wird in ControlDesk als 0 angezeigt | i.O | - |
| Testschritt 2 | Taster BSFoH mit ControlDesk | Der Wert des Tasters BSFoH wird in ControlDesk als 0 angezeigt | das Taster BSFoH am hinteren Teil des Autos nicht drücken | Der Wert des Tasters BSFoH wird in ControlDesk als 1 angezeigt | Der Wert des Tasters BSFoH wird in ControlDesk als 1 angezeigt | i.O | - |
Testfall 10
Bezeichnung: Taster BSFmH
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Taster BSFmH mit ControlDesk | Der Wert des Tasters BSFmH wird in ControlDesk als 1 angezeigt | das Taster BSFmH am hinteren Teil des Autos drücken | Der Wert des Tasters BSFmH wird in ControlDesk als 0 angezeigt | Der Wert des Tasters BSFmH wird in ControlDesk als 0 angezeigt | i.O | - |
| Testschritt 2 | Taster BSFoH mit ControlDesk | Der Wert des Tasters BSFmH wird in ControlDesk als 0 angezeigt | das Taster BSFmH am hinteren Teil des Autos nicht drücken | Der Wert des Tasters BSFmH wird in ControlDesk als 1 angezeigt | Der Wert des Tasters BSFmH wird in ControlDesk als 1 angezeigt | i.O | - |
Testfall 11
Bezeichnung: Taster Reset
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Taster Reset mit ControlDesk | Der Wert des Tasters Reset wird in ControlDesk als 1 angezeigt | das Taster Reset am hinteren Teil des Autos drücken | Der Wert des Tasters Reset wird in ControlDesk als 0 angezeigt | Der Wert des Tasters Reset wird in ControlDesk als 0 angezeigt | i.O | - |
| Testschritt 2 | Taster Reset mit ControlDesk | Der Wert des Tasters Reset wird in ControlDesk als 0 angezeigt | das Taster Reset am hinteren Teil des Autos nicht drücken | Der Wert des Tasters Reset wird in ControlDesk als 1 angezeigt | Der Wert des Tasters Reset wird in ControlDesk als 1 angezeigt | i.O | - |
Testfall 12
Bezeichnung: Vorwärts und Rückwärts
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Verstellen des Gaspedal-Wertes mit ControlDesk | Hinterräder stillhalten | Verstellen des Wertes in ControlDesk mit Slider auf "85" | Hinterräder nach vorne laufen | Hinterräder nach vorne laufen | i.O | - |
| Testschritt 2 | Verstellen des Gaspedal-Wertes mit ControlDesk | Hinterräder nach vorne laufen | Verstellen des Wertes in ControlDesk mit Slider auf "90" | Hinterräder schneller nach vorne laufen | Hinterräder schneller nach vorne laufen | i.O | - |
| Testschritt 3 | Verstellen des Gaspedal-Wertes mit ControlDesk | Hinterräder nach vorne laufen | Verstellen des Wertes in ControlDesk mit Slider auf "75" | Hinterräder rückwärts laufen | Hinterräder rückwärts laufen | i.O | - |
| Testschritt 4 | Verstellen des Gaspedal-Wertes mit ControlDesk | Hinterräder rückwärts laufen | Verstellen des Wertes in ControlDesk mit Slider auf "80" | Hinterräder Schneller rückwärts laufen | Hinterräder schneller rückwärts laufen | i.O | - |
| Testschritt 5 | Verstellen des Gaspedal-Wertes mit ControlDesk | Hinterräder rückwärts laufen | Verstellen des Wertes in ControlDesk mit Slider auf "85" | Hinterräder stillhalten | Hinterräder stillhalten | i.O | - |
| Testschritt 6 | vorwärts fahren mit Fernbedingung | Hinterräder stillhalten | Mit der Fernbedienung nach vorwärts fahren | Hinterräder nach vorwärts laufen | Hinterräder nach vorwärts laufen | i.O | - |
| Testschritt 7 | rückwärts fahren mit Fernbedingung | Hinterräder nach vorwärts laufen | Mit der Fernbedienung nach rückwärts fahren | Hinterräder nach rückwärts laufen | Hinterräder nach vorwärts laufen | n.i.O | - |
Testfall 13
Bezeichnung: Lenkung
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | Fernbedienung ist eingeschaltet und die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Verstellen des Lenkwinkel-Wertes mit ControlDesk | Vorderräder gerade stehen | Verstellen des Wertes in ControlDesk mit Slider auf "500" | Vorderräder nach rechts lenken | Vorderräder nach rechts lenken | i.O | - |
| Testschritt 2 | Verstellen des Lenkwinkel-Wertes mit ControlDesk | Vorderräder nach rechts lenken | Verstellen des Wertes in ControlDesk mit Slider auf "550" | Vorderräder weiter nach rechts lenken | Vorderräder weiter nach rechts lenken | i.O | - |
| Testschritt 3 | Verstellen des Lenkwinkel-Wertes mit ControlDesk | Vorderräder nach rechts lenken | Verstellen des Wertes in ControlDesk mit Slider auf "590" | Vorderräder nach links lenken | Vorderräder nach links lenken | i.O | - |
| Testschritt 4 | Verstellen des Lenkwinkel-Wertes mit ControlDesk | Vorderräder nach links lenken | Verstellen des Wertes in ControlDesk mit Slider auf "580" | Vorderräder weiter nach links lenken | Vorderräder weiter nach links lenken | i.O | - |
| Testschritt 5 | Verstellen des Lenkwinkel-Wertes mit ControlDesk | Vorderräder nach links lenken | Verstellen des Wertes in ControlDesk mit Slider auf "110" | Vorderräder gerade stehen | Vorderräder gerade stehen | i.O | - |
| Testschritt 6 | nach rechts mit Fernbedingung lenken | Vorderräder gerade stehen | Mit der Fernbedienung nach rechts lenken | Vorderräder nach rechts lenken | Vorderräder nach rechts lenken | i.O | - |
| Testschritt 7 | nach links mit Fernbedingung lenken | Vorderräder nach rechts stehen | Mit der Fernbedienung nach links lenken | Vorderräder nach links lenken | Vorderräder nach links lenken | i.O | - |
Testfall 14
Bezeichnung: IR-Sensor Rechts vorne
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Objekt Abstand kleiner als 4cm | Messwerte steht auf 0.19 | Abstand zwischen Objekt und Infrarotsensor weniger als 4 cm | Messwerte steht auf 0.19 | Messwerte steht auf 0.19 | i.O | - |
| Testschritt 2 | Objekt Abstand zwischen 4 und 30cm | Messwerte steht auf 0.19 | Objekt bewegt sich zwischen 4 und 30cm | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | i.O | Je größer die Entfernung, desto kleiner der Messwert |
| Testschritt 3 | Objekt Abstand größer als 30 cm | Messwerte sind nicht stabil | Abstand zwischen Objekt und Infrarotsensor größer als 30 cm | Messwerte steht auf 0.19 | Messwerte steht auf 0.19 | i.O | - |
Testfall 15
Bezeichnung: IR-Sensor Rechts hinten
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Objekt Abstand kleiner als 4cm | Messwerte steht auf 0.19 | Abstand zwischen Objekt und Infrarotsensor weniger als 4 cm | Messwerte steht auf 0.19 | Messwerte steht auf 0.19 | i.O | - |
| Testschritt 2 | Objekt Abstand zwischen 4 und 30cm | Messwerte steht auf 0.19 | Objekt bewegt sich zwischen 4 und 30cm | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | i.O | Je größer die Entfernung, desto kleiner der Messwert |
| Testschritt 3 | Objekt Abstand größer als 30 cm | Messwerte sind nicht stabil | Abstand zwischen Objekt und Infrarotsensor größer als 30 cm | Messwerte steht auf 0.19 | Messwerte steht auf 0.19 | i.O | - |
Testfall 16
Bezeichnung: IR-Sensor Hinten rechts
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Objekt Abstand kleiner als 4cm | Messwerte sind nicht stabil | Abstand zwischen Objekt und Infrarotsensor weniger als 4 cm | Messwerte steht auf 0.19 | Messwerte sind nicht stabil | n.i.O | Einfluss der Kabel,die vor dem Sensor stehen |
| Testschritt 2 | Objekt Abstand zwischen 4 und 30cm | Messwerte sind nicht stabil | Objekt bewegt sich zwischen 4 und 30cm | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | Messwerte antworten nicht auf den Abstand des Objektes zum Sensor | n.i.O | Einfluss der Kabel,die vor dem Sensor stehen |
| Testschritt 3 | Objekt Abstand größer als 30 cm | Messwerte sind nicht stabil | Abstand zwischen Objekt und Infrarotsensor größer als 30 cm | Messwerte steht auf 0.19 | Messwerte sind nicht stabil | n.i.O | Einfluss der Kabel,die vor dem Sensor stehen |
Testfall 17
Bezeichnung: IR-Sensor Hinten links
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Objekt Abstand kleiner als 4cm | Messwerte steht auf 0.19 | Abstand zwischen Objekt und Infrarotsensor weniger als 4 cm | Messwerte steht auf 0.19 | Messwerte steht auf 0.19 | i.O | - |
| Testschritt 2 | Objekt Abstand zwischen 4 und 30cm | Messwerte steht auf 0.19 | Objekt bewegt sich zwischen 4 und 30cm | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | Bei Verändern des Abstandes des Objektes zum Sensor verändert sich auch der angezeigte Messwert | i.O | Je größer die Entfernung, desto kleiner der Messwert |
| Testschritt 3 | Objekt Abstand größer als 30 cm | Messwerte sind nicht stabil | Abstand zwischen Objekt und Infrarotsensor größer als 30 cm | Messwerte steht auf 0.19 | Messwerte steht auf 0.19 | i.O | - |
Testfall 18
Bezeichnung: Gierratensensor
Tester: Xiangyao Liu,Yuhan Pan, Tim Schonlau
Datum: 05.10.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung |
|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Testfall 2 erfolgreich durchgeführt | - | - | die Live-Werte sind angezeigt | die Live-Werte sind angezeigt | i.O | - |
| Testschritt 1 | Fahrzeug dreht sich horizontal hin und her | Fahrzeug auf der Bücher und Messwerte sind nicht stabil | das Fahrzeug heben und horizontal hin und her drehen | Eines der Sensorsignale schwankt zwischen positiv und negativ | Alle vier Sensorsignale schwingen mit der gleichen Frequenz und Amplitude und sind immer größer als 0 | n.i.O | - |
| Testschritt 2 | Fahrzeug dreht sich vertikal hin und her | Fahrzeug auf der Bücher und Messwerte sind nicht stabil | das Fahrzeug heben und vertikal hin und her drehen | Eines der Sensorsignale schwankt zwischen positiv und negativ | Alle vier Sensorsignale schwingen mit der gleichen Frequenz und Amplitude und sind immer größer als 0 | n.i.O | - |
Testfall 19
Bezeichnung: Test mit Online Software
Tester: Tim Schonlau
Datum: 26.09.2023
Status: getestet
Testinstanz: Online am Fahrzeug
Verwendete Software: ControlDesk 7.1
| Schritt Nr. | Beschreibung | Ausgangszustand | Aktion(en) | Erwartetes Ergebnis | Ergebnis | Bewertung | Bemerkung | |
|---|---|---|---|---|---|---|---|---|
| Vorbedingung 1 | Control Desk 7.1 ist mit dem Online Modell geöffnet | - | - | die Live-Werte sind angezeigt | i.O | - | ||
| Testschritt 1 | Vorwärtsbeschleunigung | Die Räder stehen still. | Manuell die Beschleunigung in Control Desk ansteuern. | Die Räder drehen sich so, dass das CCF nach vorne fährt. | Die Räder beginnen sich zu drehen, nach ein paar Sekunden stürzt Control Desk ab | Alle vier Sensorsignale schwingen mit der gleichen Frequenz und Amplitude und sind immer größer als 0 | n.i.O | - |
→ zurück zum Hauptartikel: Praktikum SDE