Das Geheimnis der Feder
→ zurück zur Übersicht: WS 24/25: Escape Game

| Autor: | Sophie Koerner & Dorothea Tege |
| Betreuer: | Prof. Göbel |
Einleitung
Escape Games haben sich als wirksame Methode zur Stärkung von Teamarbeit, Problemlösungsfähigkeiten und kritischem Denken. Ein Beispiel dafür ist das Spiel „Das Geheimnis der Feder“. Es stellt die Teilnehmenden vor die Herausforderung, eine präzise Gewichtsbalance zu ermitteln und die Funktionsweise eines sensorgesteuerten Systems zu testen.
Das Spiel konzentriert sich auf eine mechanische Anordnung. Eine Feder ist an einem Stativ befestigt, an dem eine Waagschale hängt. Die Spieler müssen die optimale Masse bestimmen und auf den Waagschale legen, um ein stabiles Gleichgewicht zu erreichen. So wird experimentell das Hooke‘ sche Gesetz getestet.
Eine LED-Anzeige liefert visuelle Rückmeldungen. Zwei rote und gelbe LEDs signalisieren Abweichungen vom optimalen Gewicht. Eine grüne LED zeigt an, dass die gewünschte Position mit der richtigen Masse erreicht wurde. Ein Ultraschallsensor misst die Distanz zwischen der Unterseite der Waagschale und dem Sensor. Ziel des Spiels ist es, das exakte Gewicht zu identifizieren, das die optimale Balance im System sichert.
Das Escape Game „Das Geheimnis der Feder“ ist Teil einer Reihe von miteinander verknüpften Spielen. Das Lösen eines Spiels ist notwendig, um auf die nachfolgenden Herausforderungen zugreifen zu können. Dieses Konzept fördert die kognitive Flexibilität und die Zusammenarbeit innerhalb der Gruppe.
Anforderungen
| ID | Inhalt | Prio | Ersteller | Datum | Geprüft von | Datum |
|---|---|---|---|---|---|---|
| 1 | Das Escape-Game muss in 5 min lösbar sein | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 2 | Der verbaute Sensor muss eine Distanz messen können | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 3 | Die Distanz zur Waagschale wird durch ein LED-Ampelsystem visualisiert | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 4 | Wenn das gewählte Gewicht korrekt ist, leuchtet die LED in grün. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 5 | Das Experiment kann entweder durch Ausprobieren (leicht) oder Berechnen (mittel/schwer) erfolgen. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024
|
| 6 | Das Experiment darf nur mit den gegebenen Hilfsmitteln bearbeitet werden: Zettel, Stift und Taschenrechner. | Mittel | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 7 | Das System muss anwenderfreundlich sein. | Mittel | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 8 | Die Steuerung des Arduino-Systems erfolgt über Simulink und muss ohne Verzögerung und zuverlässig funktionieren. | Hoch | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
| 9 | Das Escape-Game muss in einen Schuhkarton passen. | Mittel | Sophie Koerner | 03.10.2024 | Dorothea Tege | 03.10.2024 |
Funktionaler Systementwurf/Technischer Systementwurf
Funktionaler Systementwurf

Für das Escape Game „Das Geheimnis der Feder“ wird eine Feder an einem Stativ befestigt und ein Waagschale darunter gehängt. Spieler müssen die optimale Masse ermitteln, entweder durch Ausrechnen der angegebenen Formel (Schwierigkeisgrad Mittel) oder durch Ausprobieren mit Gewichten, die auf den Waagschale gelegt werden. Das System beinhaltet eine LED-Anzeige, die visuelle Rückmeldungen in Form von roten, gelben und grünen LEDs gibt. Die grüne LED zeigt den korrekten Bereich an. Die gelben und roten LEDs werden verwendet, um Abweichungen vom optimalen Gewicht zu signalisieren. Ein Ultraschallsensor misst kontinuierlich die Distanz zwischen der Unterseite des Waagschales und dem Sensor.
Technischer Systementwurf

Das Escape Game „Das Geheimnis der Feder“ besteht aus mehreren integrierten Komponenten, die zusammenarbeiten. Im Zentrum steht eine mechanische Anordnung, einer Feder mit einem Waagschale an einem Stativ. Der Ultraschallsensor ist am Stativfuß positioniert und misst die Distanz zwischen der Unterseite der Waagschale und dem Sensor. Der Arduino verarbeitet die Daten des Sensors und steuert die LED-Anzeige, die aus zwei roten LEDs, zwei gelben LEDs und einer grünen LED besteht. Die roten und gelben LEDs signalisieren Abweichungen vom optimalen Gewicht in positiver und negativer Richtung, während die grüne LED anzeigt, dass das richtige Gewicht erreicht wurde. Die gesamte Hardware wird durch einen Kasten mit Aussparung für den Sensor geschützt. Die Software wird mit Hilfe von Simulink implementiert und in Echtzeit bearbeitet.
Materialliste
| Nr. | Anz. | Beschreibung |
|---|---|---|
| 1 | 1 | Funduino Arduino UNO R3 |
| 2 | 1 | IR-Abstandssensor Sharp GP2Y0A21SK0F |
| 3 | 3 | Widerstand 200Ohm |
| 4 | 1 | Steckbrett |
| 5 | 4 | Jumper Kabel männlich/weiblich, 20cm |
| 6 | X | Jumper Kabel männlich/männlich, 20cm |
| 7 | 5 | LEDs (2x rot, 2x gelb, 1x grün) |
| 8 | 1 | Stativfuß (Holz) |
| 9 | 1 | Stativstange 40 cm, 10 mm Durchmesse |
| 10 | 1 | Muffenblock |
| 11 | 1 | Steckachse |
| 12 | 2 | Schraubenfeder 25 N/m (inkl. Ersatzfeder) |
| 13 | 2 | Wägesatz 1g bis 50g |
| 14 | 1 | Waagschale (3D gedruckt) |
| 15 | 1 | Computer mit Simulink und USB-Anschluss für Arduino |
| 16 | 1 | Netzteil + Kabel |
| 17 | 1 | Steckverbindung für Stativstange (3D gedruckt) |
Komponentenspezifikation
Stückliste (BOM)
Die Bill of Materials befindet sich in der Dokumentation, diese ist in der Zusammenfassung hinterlegt.
| Stückliste | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|











Technische Daten des Sensors
Die technischen Daten des Sharp GP2Y0A21YK0F Sensors liefern wichtige Informationen über den Einsatzbereich und die Anforderungen, die erfüllt werden müssen, um ihn erfolgreich in eine Messumgebung zu integrieren. Dieser analoge Infrarot-Abstandssensor, entwickelt von der Firma Sharp, misst Entfernungen im Bereich von 10 cm bis 80 cm. Dabei nutzt der Sensor eine Infrarot-Lichtquelle und einen Photodetektor, um den Abstand zu einem Objekt zu berechnen. Das Ausgangssignal ist analog und variiert in Abhängigkeit von der gemessenen Entfernung.

| Messbereich | 10 cm bis 80 cm |
| Ausgang | Analog (Spannungssignal) |
| Versorgungsspannung | 4,5 V bis 5,5 V |
| Stromverbrauch | Maximal 30 mA bei 5 V |
| Reaktionszeit | ca. 39 ms |
| Betriebstemperatur | -10 °C bis +60 °C |
| Abmessungen | 36,5 mm x 15,5 mm x 15,5 mm |
Der Sensor verfügt über drei Pins:
- 5V
- Ground
- Analogen Ausgang.
Aufgrund seiner präzisen Messung und der einfachen Integration eignet er sich besonders für die Anwendung in der Abstandsmessung der Waagschale in diesem Projekt.
Funktionsweise und Kalibrierung des Sensors
Der IR-Abstandssensor Sharp GP2Y0A21YK0F basiert auf dem Prinzip der Infrarot-Reflexion. Dabei sendet der Sensor ein Infrarotlicht aus, das von der Oberfläche eines Objekts reflektiert wird. Die Zeit, die das Licht für den Hin- und Rückweg benötigt, wird vom Sensor gemessen, wodurch der Abstand zum Objekt berechnet werden kann.
Die Kalibrierung des Sensors ist entscheidend, um die Genauigkeit der Messergebnisse sicherzustellen. Unterschiedliche Reflexionseigenschaften von Oberflächen und Materialien können die Messwerte beeinflussen. Für eine präzise Kalibrierung werden folgende Schritte durchgeführt:
- Messung von Referenzabständen: Bekannte Distanzen werden mithilfe eines Lineals oder eines anderen präzisen Messgeräts eingestellt, und die entsprechenden Ausgangswerte des Sensors werden aufgezeichnet.
- Erstellung einer Lookup-Tabelle: Die gemessenen analogen Ausgangswerte werden in einer Tabelle den entsprechenden Distanzen zugeordnet. Diese Tabelle dient später zur Umrechnung der analogen Werte in reale Abstände.
- Formel oder Gleichung: Alternativ kann eine mathematische Funktion ermittelt werden, die den Zusammenhang zwischen analogen Ausgangswerten und realen Abständen beschreibt. Diese Gleichung wird später in die Software implementiert.
- Fehleranalyse: Die Ergebnisse werden überprüft, um Abweichungen zu erkennen und mögliche Fehlerquellen, wie Unebenheiten oder Lichtverhältnisse, zu minimieren.
- Validierung: Die Kalibrierung wird durch wiederholte Messungen und Vergleiche mit den erwarteten Werten validiert.
In diesem Projekt wurde die Distanz anhand des abgelesenen Spannungssignals des Sensors durch die Erstellung einer Lookup-Tabelle bestimmt. Dieser Kalibrierungsprozess gewährleistet, dass der IR-Sensor unter den spezifischen Bedingungen des Escape Games zuverlässig und präzise arbeitet.
Umsetzung (Hardware/Software))
Für die Realisierung des Escape Games „Das Geheimnis der Feder“ wird die Hardware auf mechanischen Bauelementen aufgebaut und mit 3D-gedruckten Bauteilen optimiert und geschützt, die zuvor mit der Software SolidWorks entworfen wurden. Die Software wird mit Matlab Simulink entwickelt, getestet und anschließend auf die Hardware geladen, um eine zuverlässige und fehlerfreie Funktionalität sicherzustellen.
Hardware-Aufbau (mechanisch)
Um das Escape Game praktisch umzusetzen, muss zunächst der mechanische Aufbau realisiert werden. Hierfür werden die Teile 9 bis 15 aus der Materialliste zu einem Galgen zusammengebaut.
Der Stativfuß wird auf einer ebenen Fläche positioniert. In die Grundplatte wurde vorab eine Vertiefung gefräst, in der der IR-Sensor eingelassen und fest verschraubt wird. Die Oberseite des Stativfußes wird so angepasst, dass sie bündig mit der Oberfläche des Sensors abschließt und eine einheitliche Ausgangshöhe bildet.
In eine zweite Bohrung wird die Stativstange eingeführt und befestigt. Um der Anforderung gerecht zu werden, dass der Aufbau in einen Schuhkarton passen muss, wird die Stativstange in zwei Teile geteilt. Die Montage erfolgt über ein 3D-gedrucktes Stecksystem. Auf das obere Ende der Stativstange wird ein Muffenblock montiert, an dem die Steckachse befestigt wird. An dieser Achse wird die Feder mit der Waagschale angebracht. Die Waagschale muss so ausgerichtet sein, dass sie mittig über dem IR-Sensor hängt.
Nach Abschluss des mechanischen Aufbaus werden die technischen Komponenten montiert. Der analoge Sensor IR-Sharp GP2Y0A21YK0F wird in die vorbereitete Vertiefung des Stativfußes eingesetzt. Die Kabel des Sensors werden versteckt unterhalb der Grundplatte geführt und zum Steckbrett geleitet, das sich am hinteren Ende des Stativfußes befindet. Auf diesem Steckbrett wird die Schaltung für den Sensor sowie die LED-Ampel implementiert. Die LED-Anzeige dient als visuelle Rückmeldung für die Position der Waagschale und das Gewicht.
3D-Modelle und ihre Funktion
Für die Konstruktion und den Schutz der Hardware wurden drei 3D-Modelle entwickelt und mit einem 3D-Drucker gefertigt:
- Gehäuse: Das Gehäuse schützt den Arduino sowie die Lötplatine vor Beschädigungen. Es hat eine Wandstärke von 5 mm, um die Stabilität sicherzustellen. Das Gehäuse misst 130 mm x 178 mm x 27 mm und ist mit vier Erweiterungen ausgestattet, die mittels M5-Linsensenkschrauben am Stativfuß befestigt werden. An der Oberseite befindet sich eine längliche Öffnung von 15 mm, durch die die fünf LEDs in Reihe sichtbar sind.
- Waagschale: Die Waagschale wurde so gestaltet, dass sie stabil genug ist, die erforderlichen Gewichte aufzunehmen. Sie hat eine Wandstärke von 3 mm, einen Gesamtdurchmesser von 81,01 mm und eine Höhe von 15 mm. Der Boden der Waagschale hat einen Durchmesser von 60 mm. Zudem verfügt sie über drei Montagelöcher mit einem Durchmesser von 4 mm und einer Tiefe von ebenfalls 4 mm.
- Verbindungsstück: Das Verbindungsstück ermöglicht die Montage einer geteilten Stativstange, falls die originale Stange für den Aufbau zu groß ist. Das Verbindungsstück hat eine Gesamtlänge von 140 mm und wurde speziell für diese Funktion mit einem 3D-Drucker konstruiert.
Alle 3D-Modelle verfügen über abgerundete Kanten mit einem Radius von 0,2 mm, um Verletzungen bei der Handhabung zu vermeiden. Durch die Kombination von mechanischem Aufbau und technischen Komponenten wird sichergestellt, dass das Escape Game sowohl stabil als auch funktionsfähig ist.
Stativfuß
Der Fuß des Stativs besteht aus einem lackierten Holzstück, das sorgfältig gefräst, geschliffen und lackiert wurde. Der IR-Sensor wurde so eingebaut, dass er bündig mit der Oberfläche abschließt, um eine stabile Ausgangsposition für die Messungen zu gewährleisten.
Hardware-Aufbau (elektrisch)
-
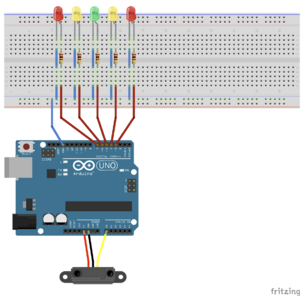
Abb. X: Verdrahtungsplan

Der elektrische Aufbau des Projekts wird im Verdrahtungsplan, welcher mit der Software Fritzing erstellt wurde, veranschaulicht. In diesem Plan sind fünf Leuchtdioden (Leds) zu erkennen, die jeweils mit einem 200-Ohm-Widerstand und dem Ground-Pin verbunden sind. Die Ansteuerung der Leds erfolgt über die Pins 3 bis 7 des Arduino Uno. Der verwendete Infrarotsensor ist an den Pins GND, 5V und A0 des Arduino angeschlossen. Zur Erstellung des Schaltplans wurde Fritzing gewählt, da bei der Nutzung von NI Multisim technische Probleme auftraten.
Die Leds sowie die Widerstände sind auf einer Lötstreifenplatine montiert, die über Drahtverbindungen mit den entsprechenden Pins des Arduino Uno verbunden ist. Der Infrarotsensor ist direkt mittels Kabeln an den Arduino angeschlossen, was eine einfache und effiziente Verbindung ermöglicht. Dieser Aufbau stellt sicher, dass die Komponenten korrekt miteinander interagieren und eine fehlerfreie Funktionalität gewährleistet ist.
Software
Komponententest
Aufgabe - Berechnung des Gewichts
Ein Stativ mit einer Feder und einer Waagschale ist aufgebaut. Die Feder hat eine Federkonstante von k = 388 N/m. Ein Ultraschallsensor misst die Distanz d zwischen der Unterseite der Waagschale und dem Sensor. Der Sensor wurde so kalibriert, dass er im Ruhezustand der Feder (ohne Gewicht) eine Distanz von d0 = 25 cm misst.
Wenn ein Gewicht m auf die Waagschale gelegt wird, dehnt sich die Feder, und die Distanz d verringert sich. Die Beziehung zwischen der Gewichtskraft FG, der Federkraft FF und der Auslenkung x der Feder lautet: